



偏航系统的控制由控制器来实现。由于风向瞬时波动频繁,但幅度不大,通常设置一定的允许偏差,如±8°,如果在此容差范围内,就可以认为是对风状态。机舱将保持既定方向。
1.偏航状态的转换程序
偏航控制共包含4种状态,分别是手动偏航、自动对风偏航、自动解缆、停止偏航。这4种状态应根据人机界面中的按键状态以及机组所执行的偏航程序进行转换,如图10-26所示。
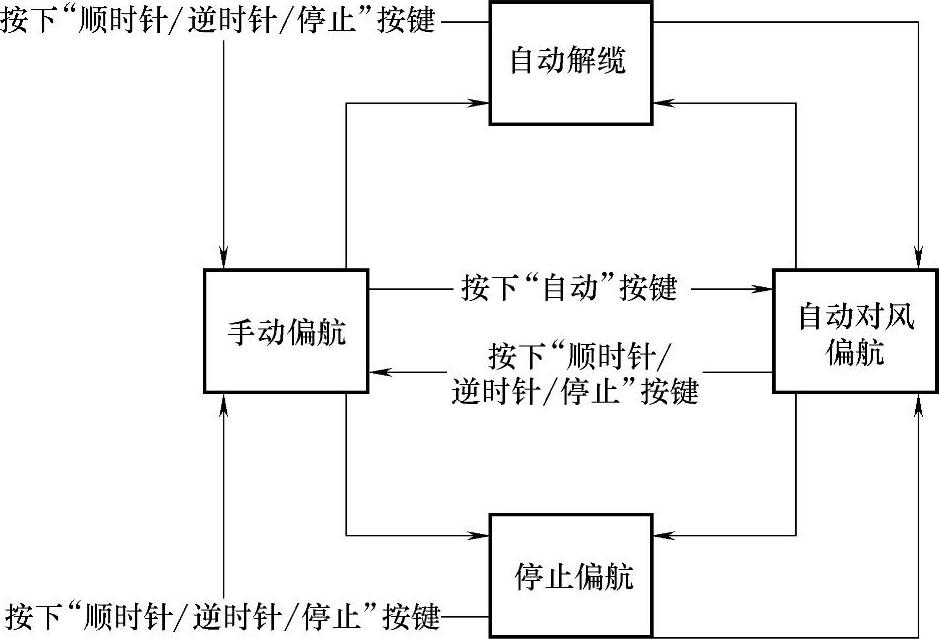
图10-26 偏航状态转换
2.偏航操作控制功能:
(1)偏航初始化
偏航系统上电后,控制器开始初始化,将此时平均偏航误差读入控制器,等待偏航。
(2)偏航等待
偏航系统处于等待状态时,偏航电动机处于停止状态,此时若平均风速大于偏航所要求的最低风速(2.5m/s),而偏航误差大于8°(或小于-8°),则起动偏航电动机,进行偏航跟踪。
(3)自动偏航功能
控制器连续3min时间内检测风向情况,若风向确定,同时机舱不处于对风位置,控制器首先判断机舱位置是否处于0位右边,若是,则左偏航;若不是,则右偏航。控制器松开偏航制动,起动偏航电动机运转,开始偏航对风程序,同时偏航计时器开始工作,根据机舱所要偏转的角度,使风轮轴线方向与风向基本一致,如图10-27所示。
(4)手动偏航功能
手动偏航控制包括顶部机舱控制、面板控制和远程控制偏航3种方式。当有手动偏航请求时,进入手动偏航初始化程序,停止偏航,并取消扭缆报警信号,然后判断偏航方向。同时,控制器会判断风速是否允许手动偏航,若不允许,则停止偏航,等风速允许手动偏航后,并且仍然存在手动偏航请求时,则继续手动偏航;如果此时无手动偏航请求,则退出手动偏航状态,转入偏航等待状态。另外,如果出现偏航标定初始化信号,并且偏航零位开关失效,则进入手动状态下偏航标定。流程图如图10-28所示。
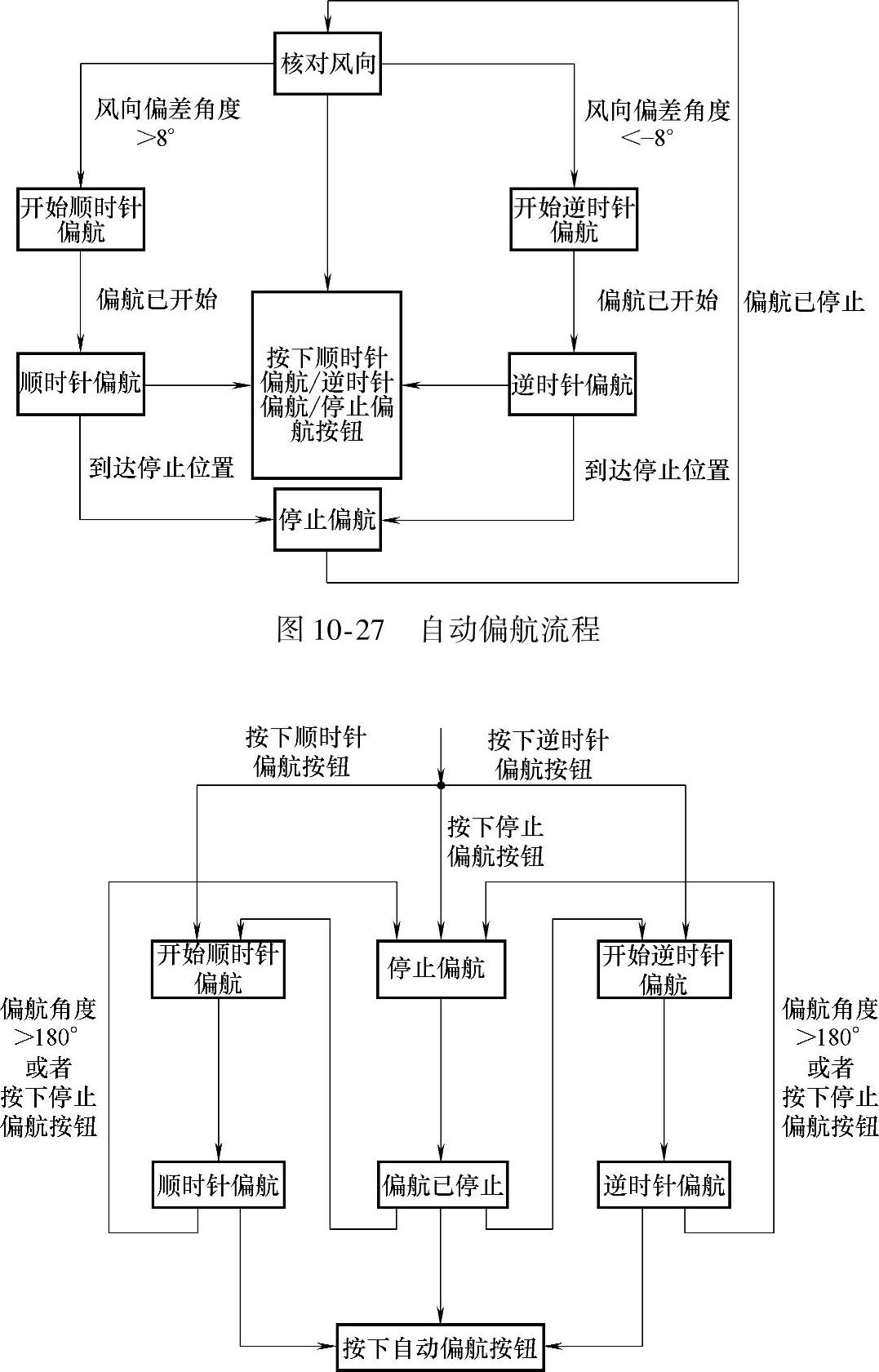
图10-28 手动偏航流程
(5)自动解缆功能
自动解缆功能是偏航控制器通过检测偏航角度、偏航时间及偏航传感器,使发生扭转的电缆自动解开的控制过程。当偏航控制器检测到扭缆达到2.5~3.5圈(可随意设置)时,若风力发电机组在暂停或起动状态,则进行解缆;若正在运行,则中心控制器将不允许解缆,偏航系统继续进行正常偏航对风跟踪。当偏航控制器检测到扭缆达到保护极限3~4圈时,偏航控制器请求中心控制器正常关机,此时中心控制器允许偏航系统强制进行解缆操作。在解缆完成后,偏航系统便发出解缆完成信号。解缆系统的工作流程如图2-29所示。
(6)偏航停止 停止偏航,取消解缆报警信号。
3.传感器
(1)风向仪
风向仪一般有机械旋转式风标或超声波共振风向测量仪,输出信号通常为4~20mA模拟电流信号。机组通常有两套风向仪,正常运行时,主控系统采用其中一套风向仪作为主风向测量源,另一套用于校验测量数据。当风向仪的信号被采集后,数据传输到主控系统,通过程序计算后进行判断是否应偏航。当确定需要偏航后,主控系统发出偏航动作信号驱动顺时针或逆时针偏航继电器,再由继电器驱动接触器吸合,通过偏航电机运行来完成顺时针或逆时针偏航对风,偏航系统的正、反向驱动电路互为闭锁回路。(https://www.xing528.com)
风向仪所采集的4~20mA模拟电流信号经过处理变为主控系统所需的风向值,具体处理过程如下公式:

其中,最大输出风向=360°,最小输出风向=0°,最大模拟电流=20mA,最小模拟电流=4mA,偏移量=-180°,则
输出风向信号=22.5×(当前输入模拟电流-4)+0+(-180)
例如:当前输入电流为12 mA,则当前风向为0°(即风轮正对风向)。
(2)偏航位置传感器
风力发电机组是靠偏航位置传感器来进行扭缆测量的。这个装置由两个相距半个齿间隔的记数传感器组成,当偏航动作后,由这两个记数传感器记录偏航齿圈上的齿数,由PLC进行数据运算来识别偏航的圈数,并根据条件判断是否进行解缆操作。
例如:SUT3000风力发电机组的偏航系统采用电感式接近开关作为计数器,测量机舱当前位置。将两个接近开关A和B固定在偏航齿圈附近,传感器的探头距离齿圈齿顶面的距离保持在5~8mm,两个传感器之间的水平中心距保持在0.5倍的齿顶宽度(约6mm),而两个传感器之间的直线中心距必须保持在2倍外径以上(36mm左右),具体安装方式如图10-30所示。
主控系统不断接收偏航角度传感器A和B发送的脉冲信号,根据偏航齿圈一周的齿数可以计算出当前偏航的角度,同时以此脉冲信号排列成不同的数组序列,从而判断出机舱偏航方向,具体方法如图10-31所示。
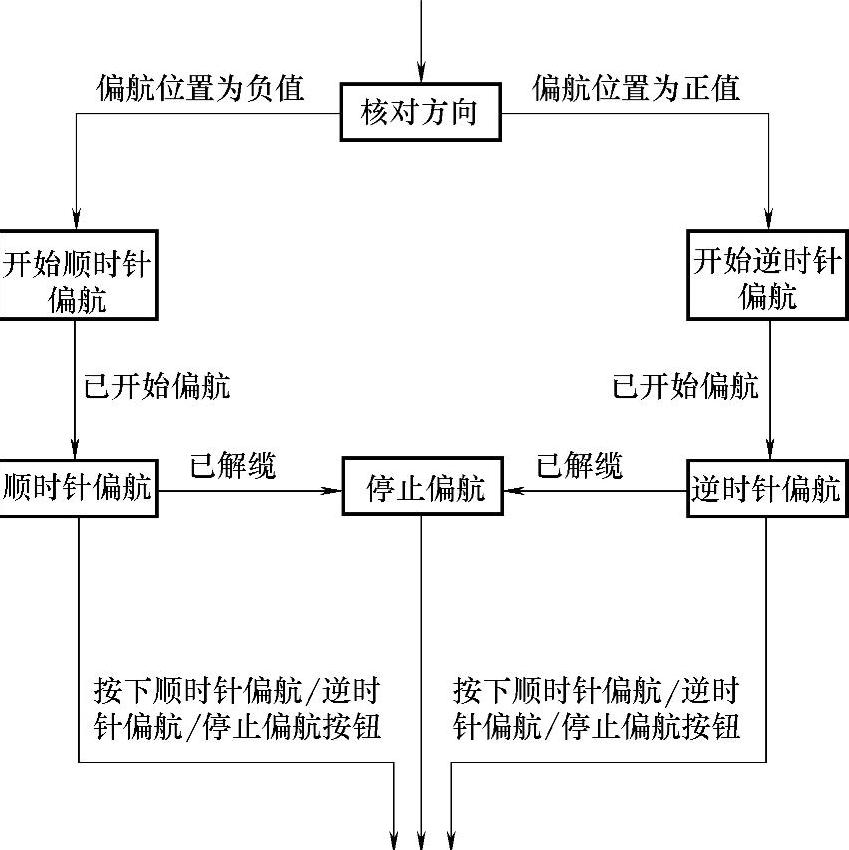
图10-29 自动解缆流程
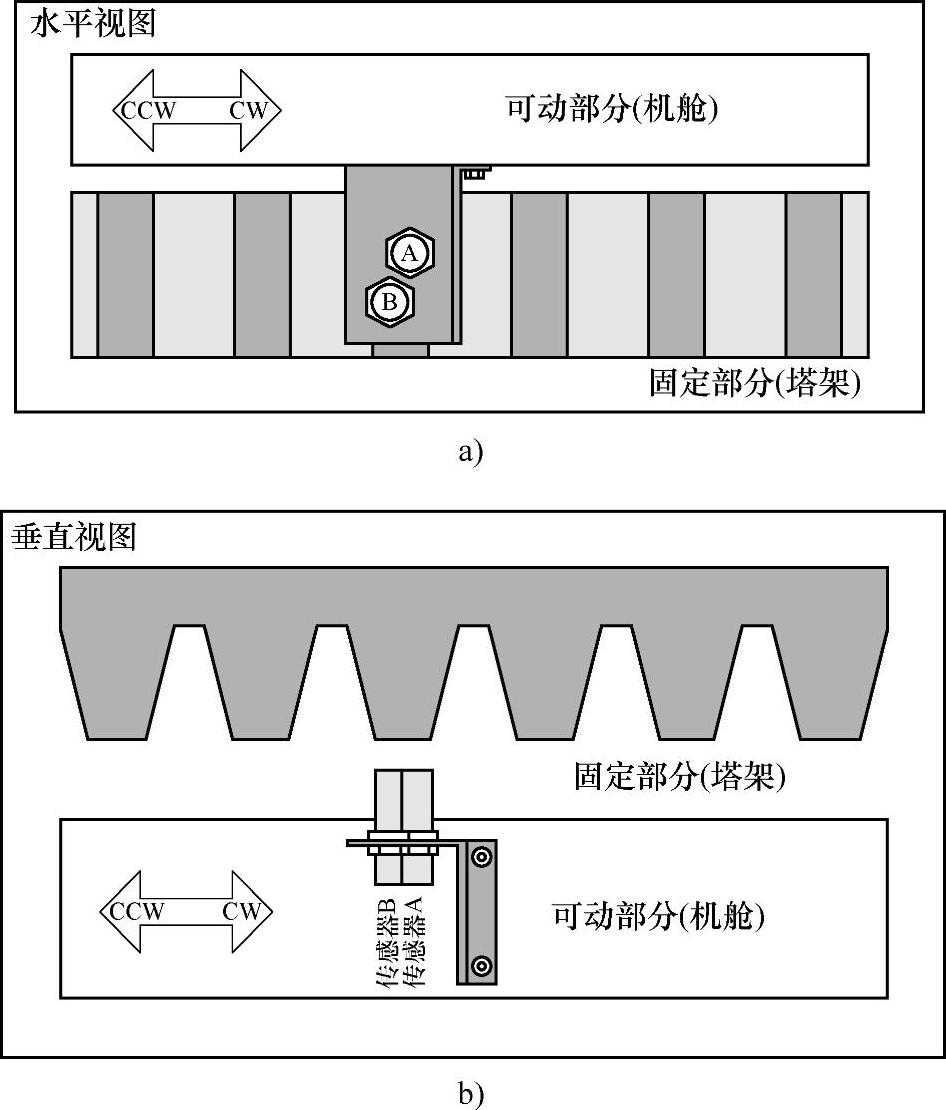
图10-30 偏航角度传感器安装方式
a)水平视图 b)垂直视图
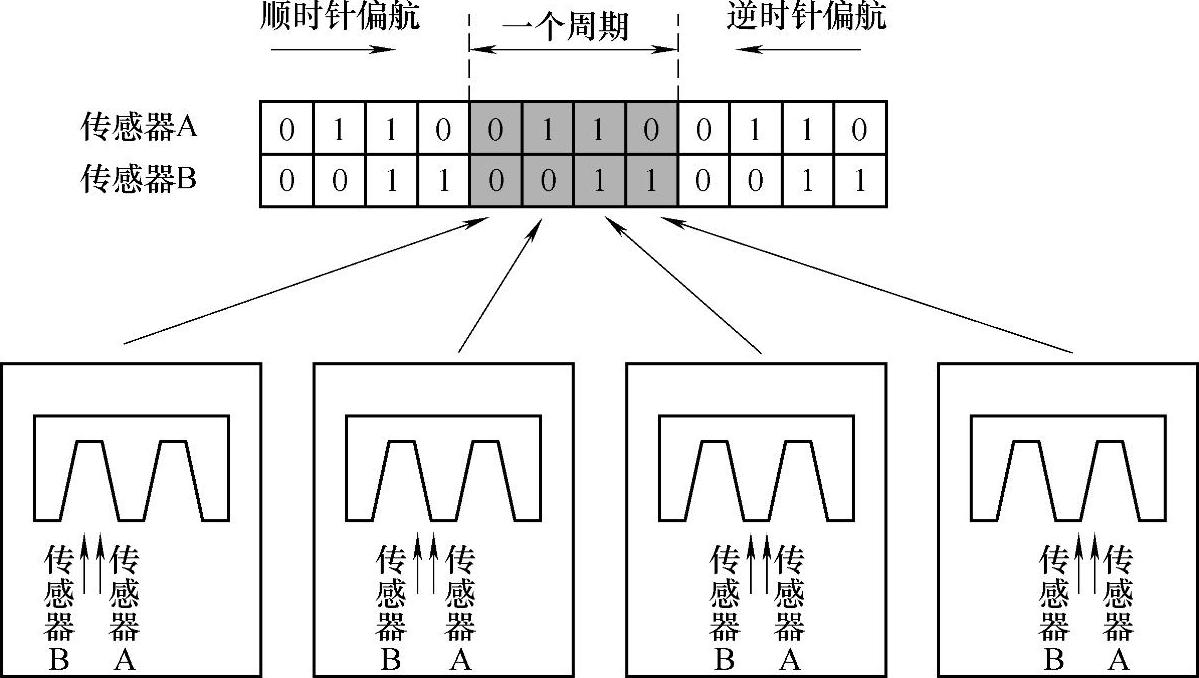
图10-31 偏航传感器输出脉冲序列
由图10-29可知,当机舱顺时针方向偏航时,偏航角度传感器A和B输出为(0,0)、(1,0)、(1,1)、(0,1);而当机舱逆时针方向偏航时,偏航角度传感器A和B输出为:(0,0)、(0,1)、(1,1)、(1,0)。如果在以上偏航过程中,出现其他数组序列,例如,直接由(0,0)跳变至(1,1),或者直接由(1,0)跳变至(0,1),则说明两个传感器的安装位置有误或者与齿顶的距离不符合要求。
(3)扭缆保护装置
扭缆保护装置(见图10-32)一般由凸轮控制器和扭缆开关组成,凸轮控制器由小齿轮与偏航盘相啮合,在偏航动作的同时也会带动凸轮控制器内部的齿轮转动,当转动一定圈后会触动机械开关动作。计算机接收到后就进行判断,是否需要解缆。一般凸轮控制器有三个开关:顺时针偏航位置开关、中间位置开关、逆时针偏航位置开关。
图10-32 扭缆保护装置
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。