



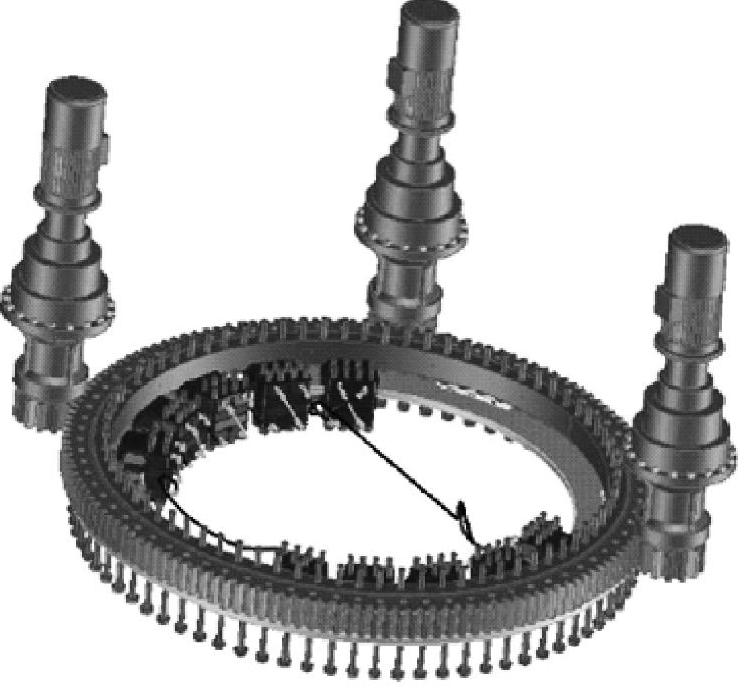
图10-22 偏航系统的执行机构
执行机构一般由偏航轴承、偏航电机、偏航减速机、偏航小齿轮、偏航齿圈、偏航制动器、偏航液压回路等组成。图10-22所示是偏航系统的执行机构。
1.偏航电动机选型
偏航驱动装置的马达可选用电动机或液压马达。偏航电动机的选型计算可以参照本章第三节相关内容。
2.偏航减速机设计
偏航减速机的设计要求:
1)偏航减速机的所有齿轮的齿面接触疲劳强度和弯曲疲劳强度的校核计算应符合GB/T3480—1997《渐开线圆柱齿轮承载能力计算方法》的有关规定。
2)偏航减速机的所有齿轮的静态强度计算应符合GB/T 3480标准的有关规定。
3)偏航减速机内太阳轮和行星轮的精度要求至少应满足GB 10095—2008《圆柱齿轮》所规定的6级,内齿圈及偏航输出齿轮至少应满足GB 10095标准所规定的8级以上。
4)螺纹连接部分的计算应按照GB/T 16823.1—1997《螺纹紧固件应力截面积和承载面积》的有关规定进行,螺栓的强度等级不低于8.8级。
5)对采用的轴承必须根据静态载荷和使用寿命来确定轴承的规格,轴承的计算按GB/T6391—2010《滚动轴承 额定动载荷和额定寿命》的有关规定进行。(https://www.xing528.com)
偏航减速机的设计参数的选择见表10-5。
表10-5 偏航减速机的设计参数表

根据目前国内已安装的机型的实际状况,偏航系统的偏航转速的推荐值见表10-6。
表10-6 偏航转速

例如:SUT-3000风力发电机组偏航驱动装置传动比为1000±2%,采用4级行星变速箱。其特点为:结构紧凑、体积小、重量轻、传动比范围大、传动效率高、输入输出轴同轴、可以实现动力的分流和变速等。由于行星齿轮传动结构复杂,对设计、制造和使用维修要求高。在高速端的行星齿轮传动,在均载机构的动态特性、系统的振动特性、零件的结构和制造精度等方面要求更高。
一种由电动机、减速箱和小齿轮组成的偏航驱动机构总成如图10-23所示,与图10-22中的结构差别在于电动机偏置安装。

图10-23 偏航驱动机构总成
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。