



鉴于风力发电机组齿轮箱行星传动主要采用NGW型,以下内容主要针对NGW型传动。
1.传动比分配
目前兆瓦级风电齿轮箱大多采用或者一级行星加二级平行轴传动方式,或者二级行星加一级平行轴的传动方式,增速比最高可达100左右。
多级传动中,首先要进行的工作是传动比的合理分配。原则是:
1)尽可能获得较小的外形,或在外形尺寸一定的情况下获得较大的安全裕度;
2)各部分强度设计较为均衡,便于采用润滑等必要措施。
一级行星加二级平行轴传动方式每级传动比可按推荐单级传动比确定,但要避免后二级平行轴传动中大齿轮与轴相碰,同时为了减小尺寸,二级平行轴传动采用折叠式传动路线,太阳轮轴与输出轴的中心距要考虑制动盘不要与集电环相碰。
二级行星加一级平行轴的传动方式中,行星传动的传动比的许用范围受结构及强度两方面的影响。在结构方面,最大传动比受邻接条件的限制,即与行星轮的个数np有关,最小传动比受行星轮最小直径的限制,主要是行星轮的旋转支承即行星轮轴承,一般希望将轴承设置在行星轮轴孔中,因此行星轮采用滚动轴承时,行星轮的直径尽可能不要太小,即传动比不要过小,一般来说,传动比i≥4时,可在行星轮轴孔中放置滚动轴承。而在强度方面,过大的传动比将损失太多的承载能力,有分析表明,当传动比在4.5和5时具有较高的承载能力。因此,单级行星传动传动比一般在3.15~6.3之间。
在没有特殊要求的情况下,当各级传动均为行星传动时,可参照以下经验方法分配传动比:
两级传动低速级传动比:
三级传动低速级传动比:
三级传动中间级传动比:
为使行星减(增)速器使用更加合理,在下述传动比范围内,推荐采用派生型结构,即在高速端附加硬齿面平行轴定轴传动:对于单级派生型传动i2=7.1~18;对于两级派生型传动i2=40~125。一般情况下,每级的行星轮个数均为np=3。
在工程设计中,同一齿轮箱中相邻两级内齿圈直径的控制比例范围为:尺寸较大一级与尺寸较小一级的分度圆直径之比一般不大于1.5,通常将这个比例称作相邻齿圈的直径比或简称为级间直径比。相邻齿圈的直径比常用范围为Kd=1.2~1.4。
一般情况下低速级的承载能力决定了减(增)速器的额定传递功率,而较高转速一级的承载能力通常会富裕20%~40%。
【例8-2】 试确定某二级行星传动的传动比。已知低速轴转速n2=14.25r/min,总传动比i=28.2。
解:低速级传动比 i2=0.5 +2~2.5=4.65~5.15
+2~2.5=4.65~5.15
高速级传动比i1=i/i2=5.47~6.06
试取i2=5.15,i1=5.47,则i=i1×i2=28.17
2.齿数、模数、齿形角及变位系数
行星传动中,小齿轮的最大齿数z1max在保证齿轮具有足够的弯曲强度条件下,可按图8-18选取。图8-18是根据接触与弯曲等强度条件推荐的z1max值,图中硬度值是大齿轮的最低硬度,小齿轮的硬度等于或大于大齿轮的硬度,硬度200HBW、300HBW和45HRC是整体热处理硬度,60HRC是轮齿表面硬度。
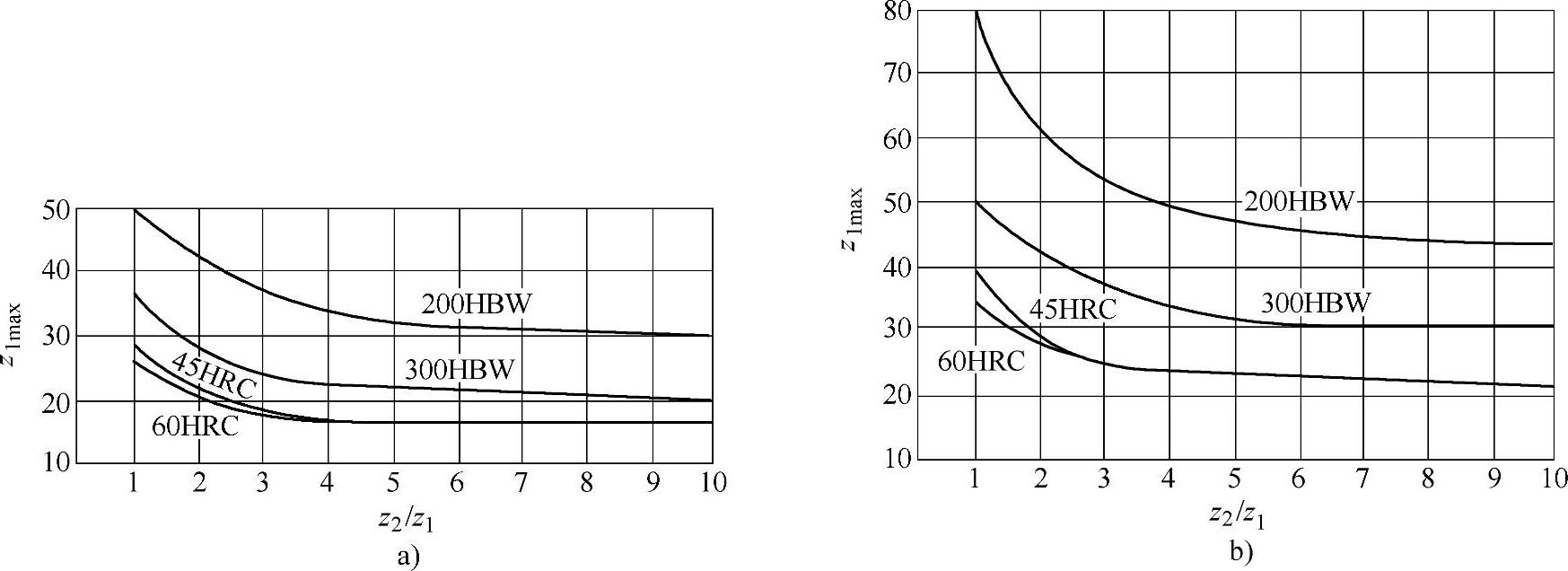
图8-18 小齿轮最大齿数z1max
a)一般齿轮 b)高速齿轮
当齿面硬度≤350HBW时,推荐z1min≥17;当齿面硬度≥350HBW时,推荐z1min≥12
内齿圈的常见齿数范围:70~125;太阳轮的常见齿数范围:16~35;行星轮的常见齿数范围:25~50。模数一般采用标准系列值,齿形角多采用20°。
一般采用变位传动,外啮合总变位系数为0.3~0.8,可参考下式选择太阳轮、行星轮的变位系数χa、χc:
式中 za、zg——分别为太阳轮、行星轮齿数。
变位系数的选择除考虑强度及啮合情况外,还应有利于降低滑差。
初步设计时,下面各式可作为参数取值的参考:
行星传动中太阳轮齿数可按下式估算:
与上式对应的模数表达式为
式中 db——内齿圈分度圆直径,方案初选时按下式近似计算(行星轮个数为3,且按接触强度计算时),
 ;
;
M2——低速轴(行星架)工作转矩;
KA——使用系数;
ϕd——齿宽系数,对增速传动通常0.15≤ϕd≤0.25,一般情况均可按 0.22:
0.22:
[σH]——许用接触应力。
如各齿轮均为硬齿面,则模数m应由弯曲强度来确定。
参数选择要满足传动比条件、同心条件、邻接条件、装配条件,可根据这些条件编写配齿程序(见图8-19,对于未变位齿轮),根据配齿结果结合以上计算式初定各参数。最终的参数还要满足齿面接触和齿根弯曲强度条件。
【例8-3】 初步确定某发电机用三级行星-平行轴齿轮增速器低速级参数。要求该增速器在额定功率下工作20年,已知低速轴转速为n2=14.25r/min,输出轴转速为na=1200r/min,功率P=3300kW,取使用系数KA=1.4。内外齿轮为硬齿面,许用接触应力[σH]=1450MPa。
解:1)确定低速级传动比(https://www.xing528.com)
本例总传动比为
i=1200/14.25=84.21
采用二级行星加一级平行轴传动方案,综合考虑各种因素后取低速级行星传动减速比为5.31,中间级行星传动减速比为5.32,高速级平行轴传动减速比为2.97。
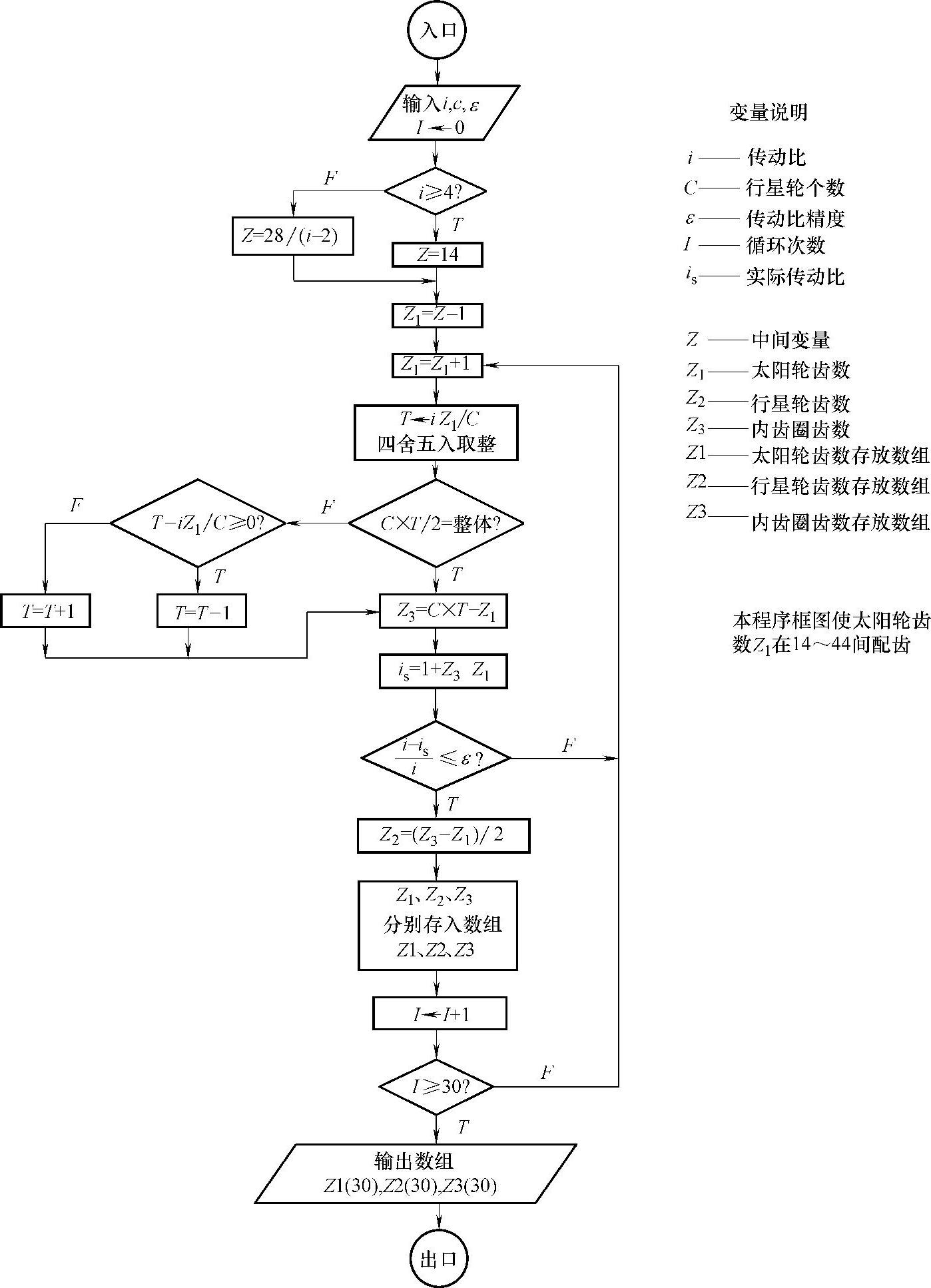
图8-19 NGW型行星传动配齿程序框图
2)传动部分的机械效率在计算工作转矩时予以忽略,则低速轴的名义工作转矩M2如下

3)内齿圈的规格
取ϕd=0.22,则

4)模数、齿数
模数m:

取m=20mm
齿数:
zb=2036/20=101.8
另外,由于 ,查图8-18得z1max=22左右,试取za=22,则zb=za(i-1)=22×(5.31-1)=94.82,取zb=95。不考虑变位时的同心条件为
,查图8-18得z1max=22左右,试取za=22,则zb=za(i-1)=22×(5.31-1)=94.82,取zb=95。不考虑变位时的同心条件为
取zc=36(同心条件由变位后啮合角配凑可以满足)。
装配条件  (为整数,装配条件满足)
(为整数,装配条件满足)
实际传动比  (误差不大,传动比条件满足)。
(误差不大,传动比条件满足)。
至此,初定低速级齿轮参数为
m=20mm,za=22,zb=95,zc=36。
通常采用变位齿轮传动,有关变位系数、啮合角及中心距等参数见参考资料。
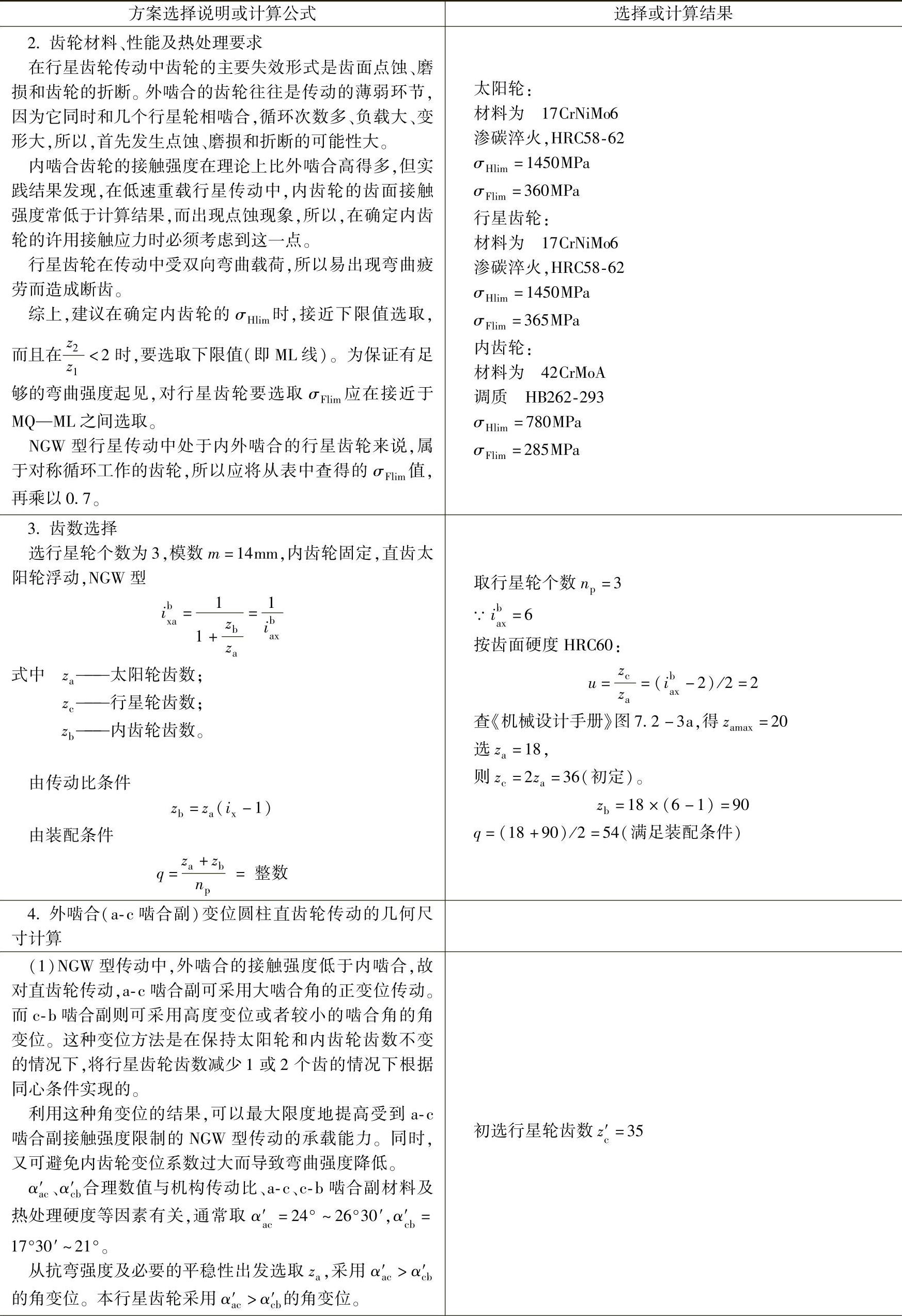
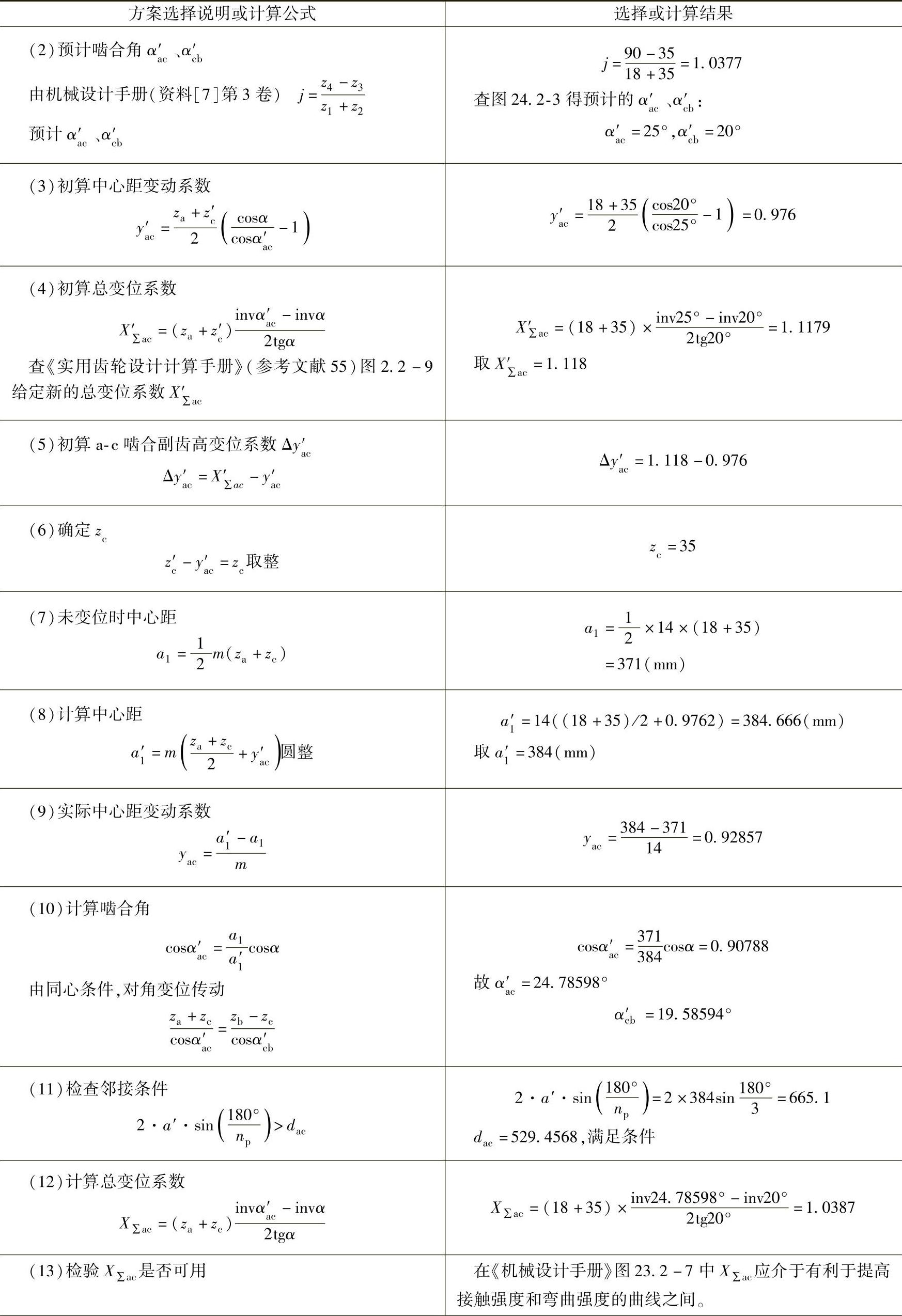
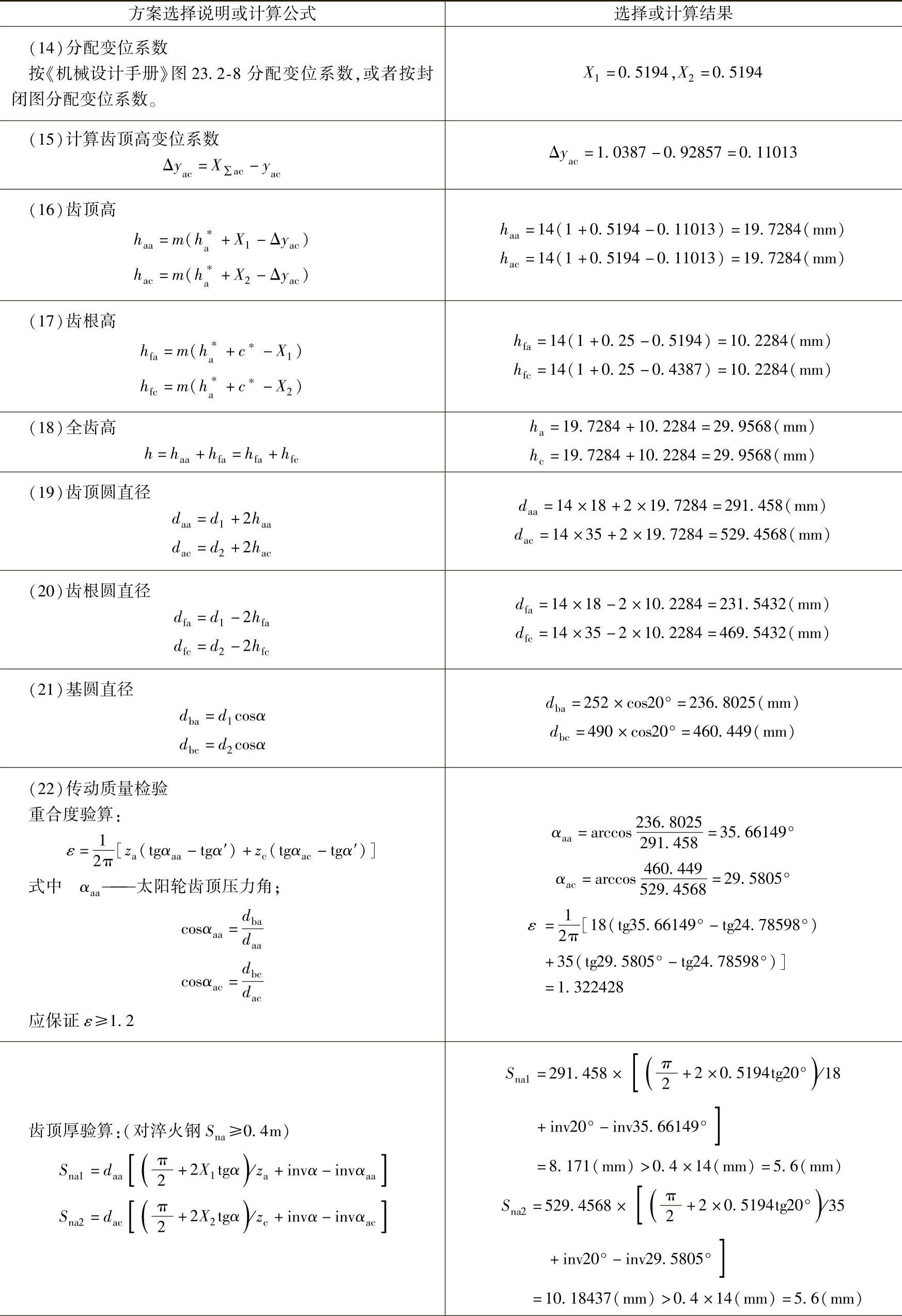
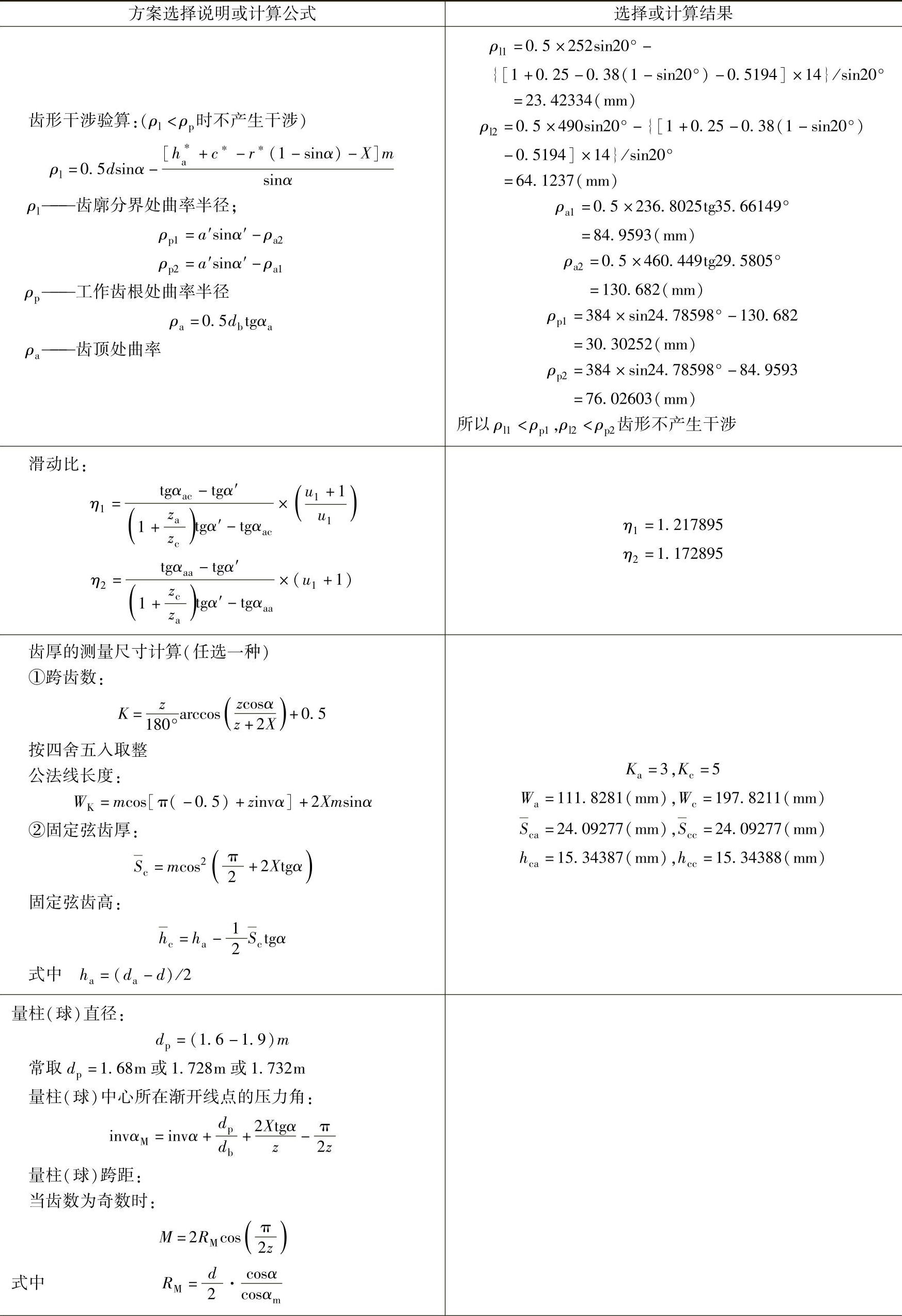
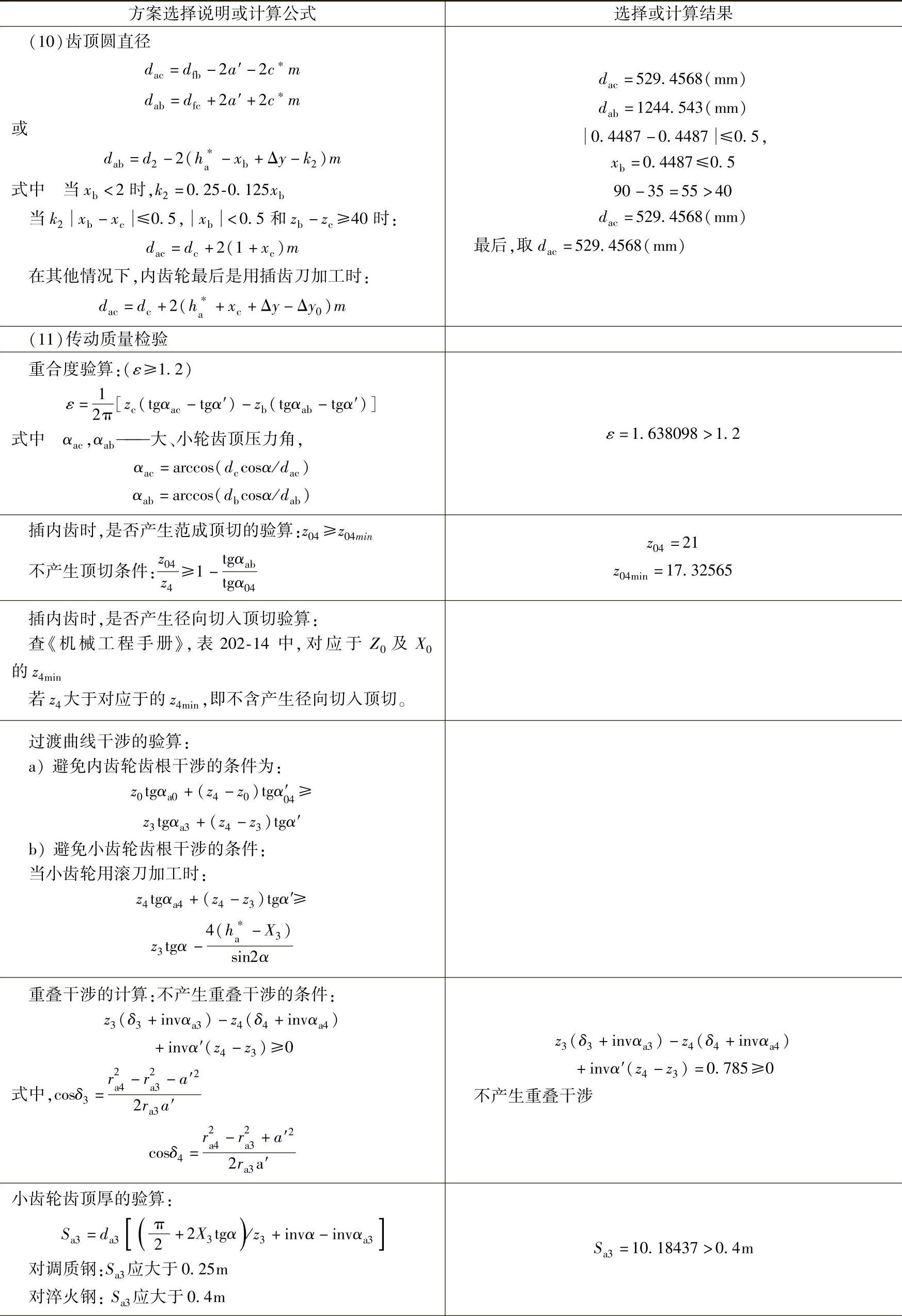
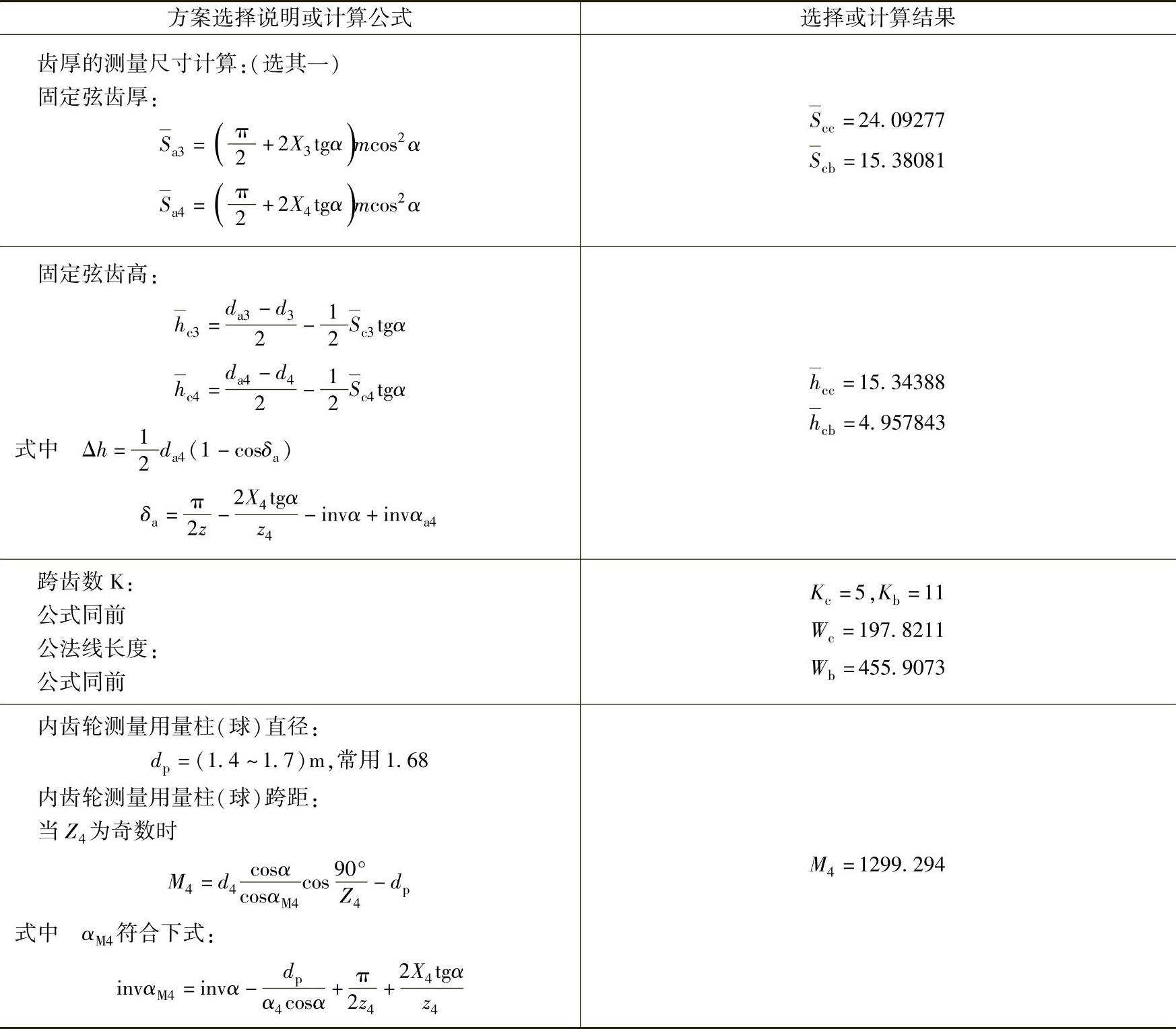
3.齿轮箱设计实例——1MW风力发电机组齿轮箱行星齿轮副设计
已知条件:为1MW变速恒频风力发电机组配置一台增速箱,共三级传动,低速级为NGW型行星齿轮传动,传动方式如图8-20所示。增速比iX=1∶6,设计功率为1100kW,输入转速为nx=21.11112r/min,输出轴转速为na=126.6667r/min。要求24h连续工作,寿命为20年。
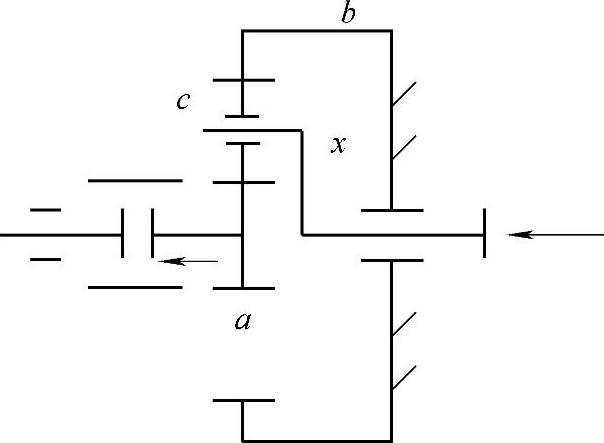
图8-20 传动机构简图

(续)
(续)
(续)
(续)
(续)
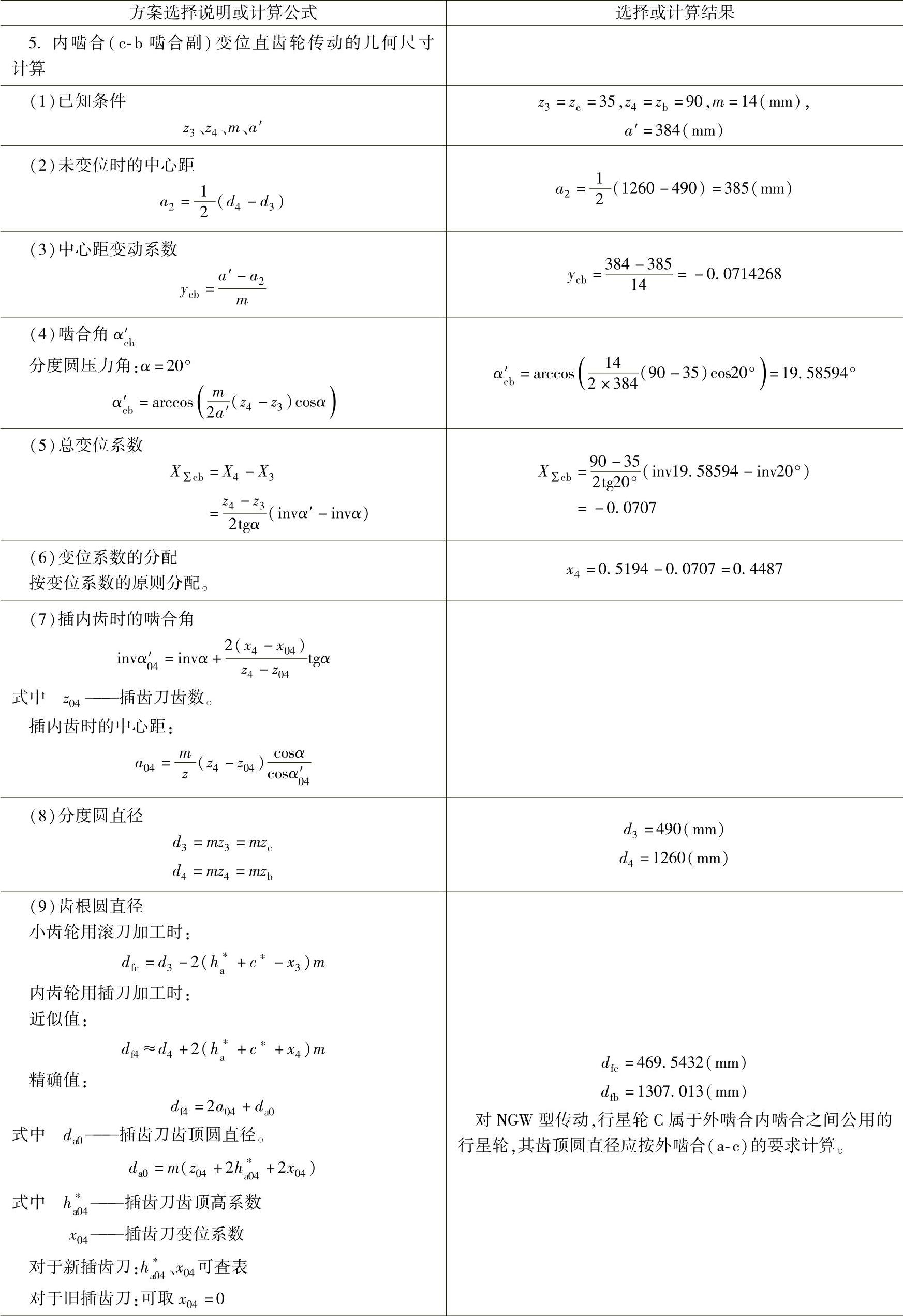
(续)
(续)
在相关尺寸确定以后,还要按本节第三款的介绍的方法进行强度校核,这里不再赘述。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。