



本小节描述了风力发电机组的设计工况和载荷状态,并规定了设计中需考虑的最少载荷状态要求。为了达到设计目的,风力发电机组寿命以风力发电机组可能经历的、包含各重要条件的设计工况来体现。载荷状态应由风力发电机组的运行模式或其他设计工况(如特定的装配、吊装或维护条件)与外部条件的组合确定。应将具有合理发生概率的各相关载荷情况与控制和保护系统动作放在一起考虑。用于验证风力发电机组结构整体性能的设计载荷状态应由下面的组合形式进行计算:正常设计工况和适当的正常或极端的外部条件;故障设计工况和适当的外部条件;运输、安装和维护设计工况和适当的外部条件;如果极端外部条件和故障状态存在相关性,可以将它们组合在一起,作为一种设计载荷状态考虑。
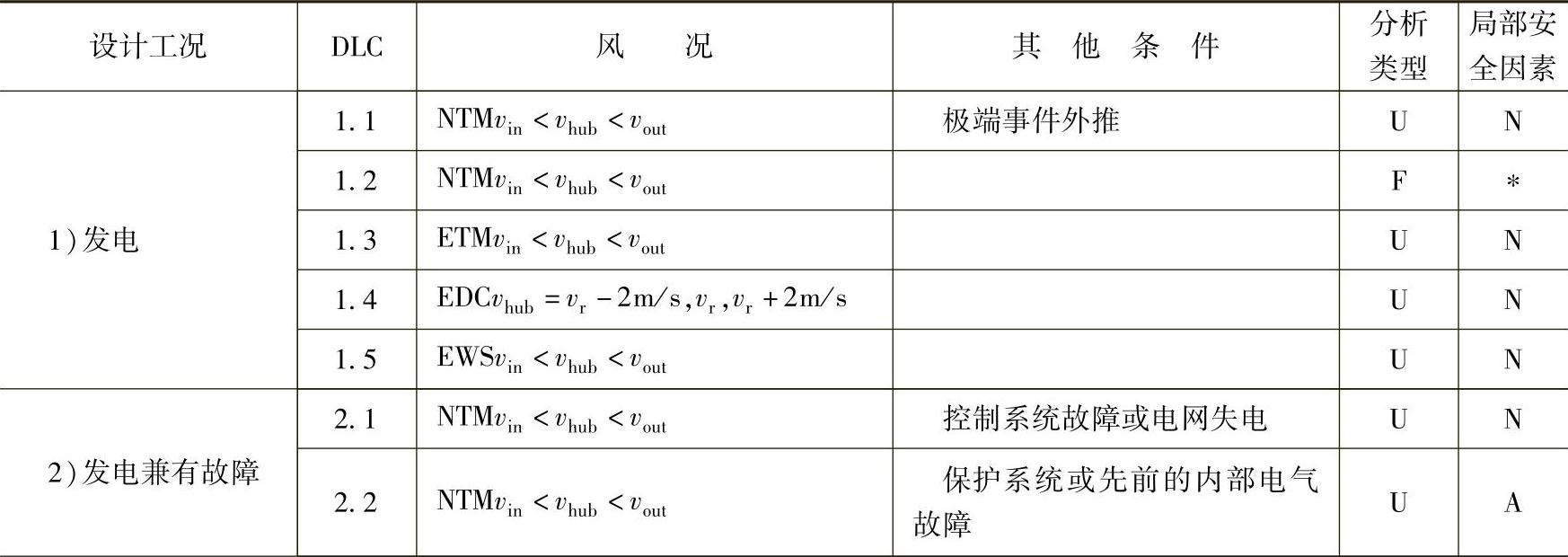
表3-2列出了需要考虑的设计载荷状态(DLC)。
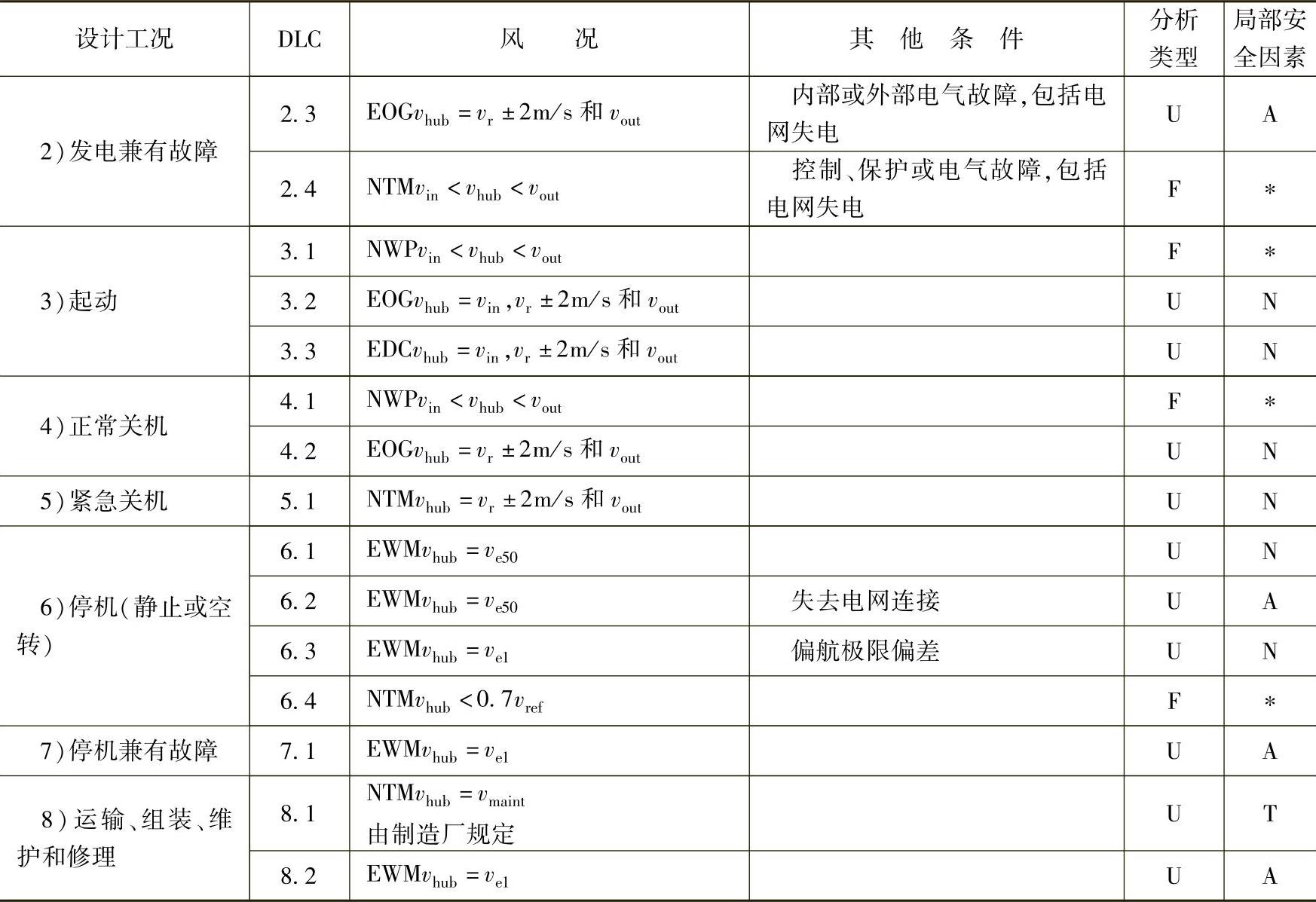
表3-2 设计载荷状态
(续)
在表3-2中DLC——设计载荷状态;
EDC——极端风向变化;
EOG——极端运行阵风;
EWM——极端风速模型;
EWS——极端风切变;
ETM——极端湍流模型;
NTM——正常湍流模型;
NWP——正常风廓线模型;
F——疲劳载荷分析;
U——极限强度分析;
N——正常;
A——非正常的;
T——运输和安装;
∗——疲劳局部安全系数;
vhub——轮毂高度处的平均风速;
vr——额定风速;
vin——切入风速;
vout——切出风速;
vref——参考风速;
ve50(z)——50年一遇极端风速;
ve1(z)——1年一遇极端风速;
vmaint——维修、保养风速;
vr±2m/s——应分析此风速范围内的所有风速的敏感性。
在每种设计工况中,应考虑几种设计载荷状态。至少应考虑表3-2规定的设计载荷状态。表3-2中,每种设计工况都通过对风况、电气和其他外部条件的描述,规定了设计载荷状态。
如果在有确定性风况模型的设计载荷状态下控制器能使风力发电机组在其达到最大偏航角和/或最大风速前停机,则必须表明在相同确定风况的湍流条件下,风力发电机组也能可靠地关机。
在特定的风力发电机组设计中,还应考虑与结构性能相关的其他设计载荷状态。(https://www.xing528.com)
对每种设计载荷状态,在表3-2中用F和U规定了相应的分析类型。F表示疲劳载荷分析,用于疲劳强度评估;U表示极限载荷分析,如材料强度分析,叶尖挠度分析和结构稳定性分析等。
标有“U”的设计载荷状态,又分为正常(N),非正常(A),运输和吊装(T)等类别。在风力发电机组正常寿命期内,正常设计载荷状态是要频繁出现的,此时风力发电机组处于正常状态或仅出现短时的异常或轻微的故障。非正常设计载荷状态出现的可能性较小,它的出现往往对应导致系统保护功能起动的严重故障。设计载荷状态的类型N、A或T决定极限载荷使用的局部安全系数γf。这些安全系数将在表3-3中给出。
表3-2给出的风速范围,应考虑对风力发电机组设计造成最不利条件的风速。风速范围可用一组离散数值表示,为确保计算的精度,该组数据应有足够的分辨率。在确定设计载荷状态时,可参照本章第一节阐述的风况。
对于不同的设计工况,设计计算方法的具体要求概述如下:
1.发电(DLC1.1~1.5)
在此设计工况下,风力发电机组处于运行状态,并有电力负载。机组的总体布局应考虑风轮不平衡的影响。设计计算时应考虑风轮制造中所规定的最大不平衡质量和气动不平衡(如叶片桨距和扭角的偏差)。此外,在运行载荷分析中,应考虑实际运行同理论上最佳运行工况的偏差,如偏航误差和控制系统跟踪误差等。
设计载荷状态(DLC)1.1和1.2体现了由于风力发电机组寿命期内正常运行时由大气湍流所引起的载荷要求(NTM)。DLC1.3体现了极端湍流情况下所造成的极限载荷的要求。DLC1.4和1.5考虑的则是风力发电机组的寿命期内可能出现的危险事件的瞬态情况。
DLC1.1的仿真数据统计分析,至少要包括叶根面内和面外的弯矩以及叶尖挠度的极值计算。如果DLC1.3的极限设计值超出这些参数的极限设计值,DLC1.1的进一步分析可以省略。如果DLC1.3的极限设计值没有超出这些参数的极限设计值,可以增加DLC1.3所使用的极端湍流模型中参数c(见式(3-15)),直到由DLC1.3计算出的极限设计值等于或大于DLC1.1中所推算出的极限设计值。
2.发电兼有故障或电网失电(DLC2.1~2.4)
这种设计工况包括了在风力发电机组发电过程中由于故障或失去电网连接所触发的瞬时事件。控制和保护系统的任何故障或电气系统的内部故障(如发电机短路),对风力发电机组载荷有明显影响,应假设它们在风力发电机组发电期间有可能发生。对于DLC2.1控制功能或电网失电出现的故障可认为是正常事件。对于DLC2.2保护系统或内部电气系统出现的故障可认为是非正常事件。对于DLC2.3潜在的重要风况EOG,与内部或外部的电力系统故障(包括电网失电)的组合,被认为是非正常事件。在这种情况下,这两个事件发生顺序的选择应能得到最不利载荷。如果发生故障或电网失电后未能引起立刻关机,由此产生的载荷可导致严重疲劳损坏,这种情况可能持续的时间和正常湍流条件(NTM)下所造成的疲劳损伤,应在DLC2.4中进行评估。
3.起动(DLC3.1~3.3)
这种设计工况包括风力发电机组从静止或空转状态到发电状态过渡期间产生载荷的所有事件。发生的次数应根据控制系统行为进行估算。
4.正常关机(DLC4.1~4.2)
这种设计工况包括风力发电机组从发电状态到静止或空转状态过渡期间产生载荷的所有事件。发生的次数应根据控制系统的行为进行估算。
5.紧急关机(DLC5.1)
考虑由于紧急关机引起的载荷增量。
6.停机(静止或空转)(DLC6.1~6.2)
在这种设计工况下,风轮处在静止或空转状态。在DLC6.1,6.2和6.3中,考虑极端风速模型(EWM)。对于DLC6.4,考虑正常的湍流模型(NTM)。
对于风况由EWM确定的设计载荷状态,应采用稳态的极端风模型或极端湍流模型。如果采用极端湍流模型,应采用完全动态仿真或准稳态分析对响应结果进行评估,采用准稳态分析时应用ISO 4354中的公式对阵风和动态响应进行适当的修正。如果采用稳态极端风模型,共振响应的影响应采用上述的准稳态分析进行评估。如果共振与背景响应(R/B)之比小于5%,可以采用稳态极端风模型进行静态分析。如果在特征载荷下偏航系统出现滑动,最大可能的不利滑动应加到平均偏航误差中。如果风力发电机组中有偏航系统,并且在该系统中考虑了极端风况下的偏航运动(如自由偏航,被动偏航或半自由偏航),则应采用湍流风模型,并且偏航误差取决于湍流风向的变化和风力发电机组偏航的动态响应。如果随着风速的增加,风力发电机组由正常运行到极端情况的期间遭遇大幅度的偏航运动或平衡变化,这种情况也应纳入分析当中。
在DLC6.1中,对于有主动偏航系统的风力发电机组,如果可以确保偏航系统不产生滑动,那么采用稳定极端风模型时允许最大偏航误差为±15°,或采用极端湍流风模型时允许平均偏航误差为±8°。
在DLC6.2中,应考虑暴风早期阶段极端风况下电网发生断电的情况。除非能为控制和偏航系统提供备用电源,并且具有至少6h的偏航调节能力,否则必须分析风向变化±180°所产生的影响。
在DLC6.3中,1年一遇的极端风况应与极大偏航偏差相结合。采用稳态极端风模型时假定极大偏航偏差为±30°,采用湍流风模型时假定平均偏航偏差为±20°。
在DLC6.4中,对任何部件可能出现严重疲劳损伤(如源于空转叶片的质量)的各种风速条件,应考虑在这些风速所对应的波动载荷下预期的停机时间。
7.停机兼有故障(DLC7.1)
对由于电网或风力发电机组自身故障引起的停机中所出现的不正常现象,应进行分析。如果任何故障(除电网失电外)造成机组的不正常现象,则应分析可能产生的后果。故障状态应与1年一遇的极端风速模型(EWM)结合起来,应带有湍流或具有阵风和动态响应修正的准稳态条件。
对于偏航系统故障,应考虑±180°的偏航偏差。对于任何其他故障,偏航偏差应符合DLC6.1。在DLC7.1中特征载荷条件下,偏航系统里发生滑动,则应考虑可能的最不利滑动。
8.运输、组装、维护和修理(DLC8.1~8.2)
对于DLC8.1,制造厂应说明风力发电机组运输、现场组装、维护和修理中所假定的所有风况和设计工况。如果最大的限定风况在风力发电机组上产生很大的载荷,那么在设计中应考虑最大限定风况。制造厂应在限定风况和设计中所考虑的风况之间留有足够余量。足够的余量可以通过在限定风速上增加5m/s而得到。
此外,DLC8.2中应包括所有持续时间可能超过一周的运输、安装和维修情况。相应地,还包括未吊装完的塔架,或塔架上没有安装机舱以及风力发电机组上缺少一个或多个叶片的情况。可以假设所有的叶片同时安装。应假定在以上任何一种情况下都没有电网连接。应采取一些措施以减少其中任何一种状态下的载荷,只要这些措施不需要电网连接。
锁定装置应能承受由DLC8.1中相关工况引起的载荷,尤其要考虑最大设计驱动力。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。