



1.控制要求
用PLC采用PID控制算法对加热炉迸行恒温控制。PID控制的硬件环境与11.7.1节中PWM的控制是一样的,控制过程的要求也基本相同,人机界面也使用PC机,其区别仅在于输出量是幅值可调的伺服电压或电流。
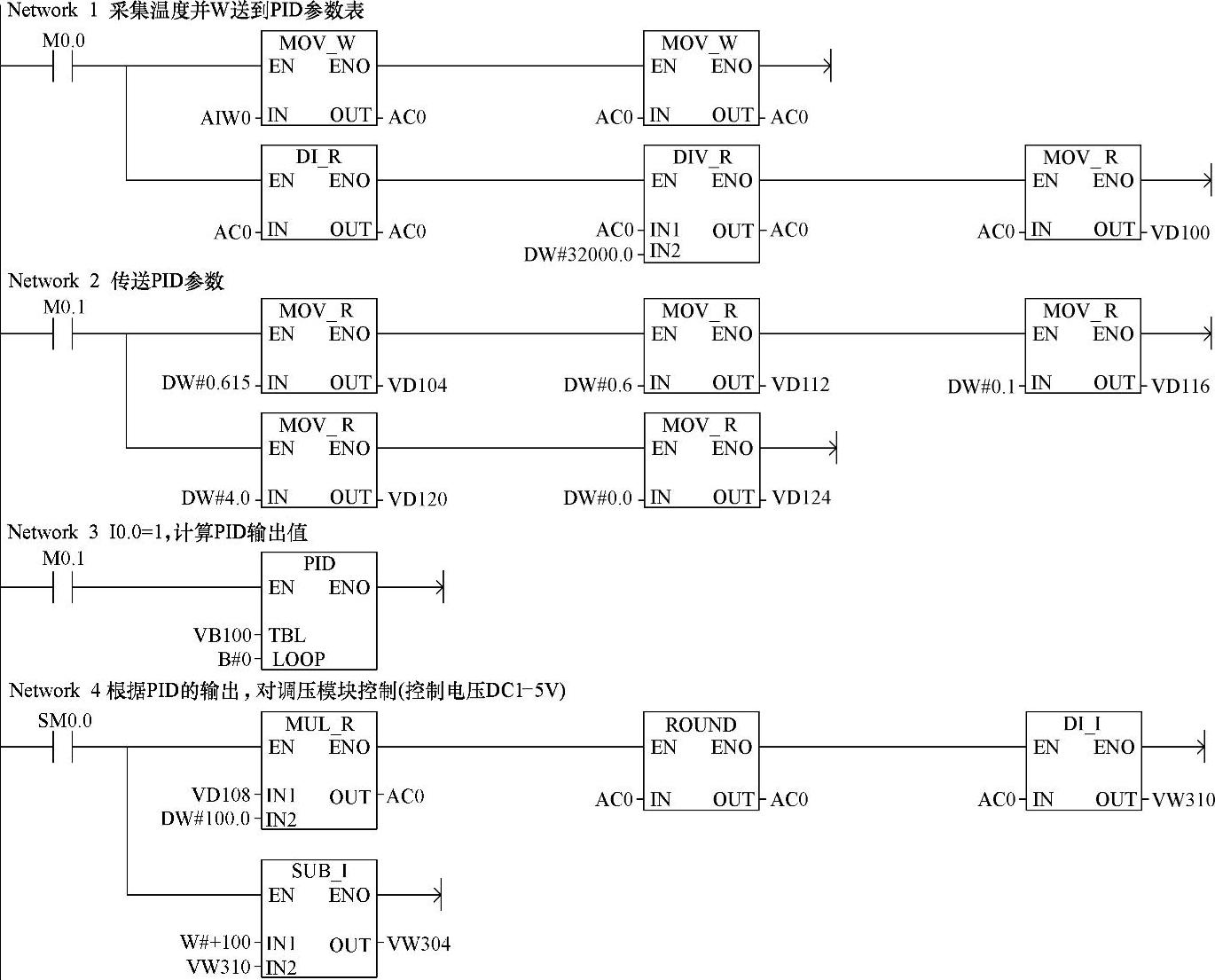
图11-79 温度PWM控制程序INT0
2.硬件设计
(1)机型选择 养护窑的PID控制中,PLC机型的选择和PWM控制相同。由CPU224主机和模拟量输人/输出模块EM235组成硬件系统。EM235的AI接收PT100信号的输人,EM235的AO把PLC的输出送到调压模块EUV-10A控制电动执行器。
和PWM控制一样,选用一台工控机。工控PC机的COM1和PLC的通信口0由PC/PPI电缆相连,使用自由口协议通信。用PC机接收PLC发送来的温度实测值和设定值参数。PC机利用VB程序采集这两个参数,并用曲线显示。PLC则不断地向PC机发送温度数据。其硬件设计如图11-80所示。
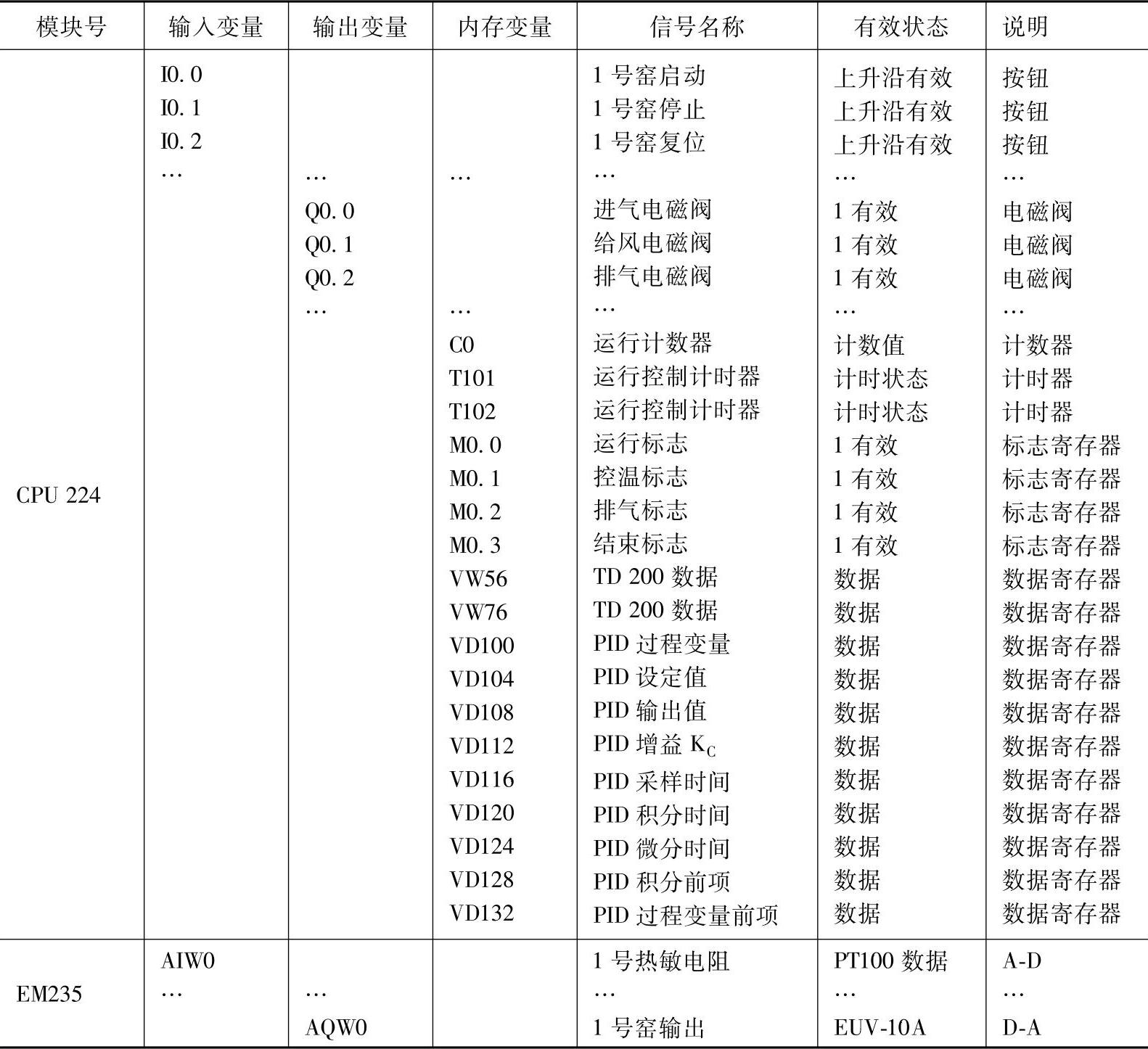
(2)内存变量分配表 根据温度控制系统的组态,做出养护窑温度PID控制的内存变量分配表,见表11-23所示。
3.程序设计
PID控制程序的设计思路与PWM控制程序的思路基本相同。由VB完成PC机和PLC的通信,由PLC对温度迸行控制。如果说有区别,区别就在于控制算法和控制方法。
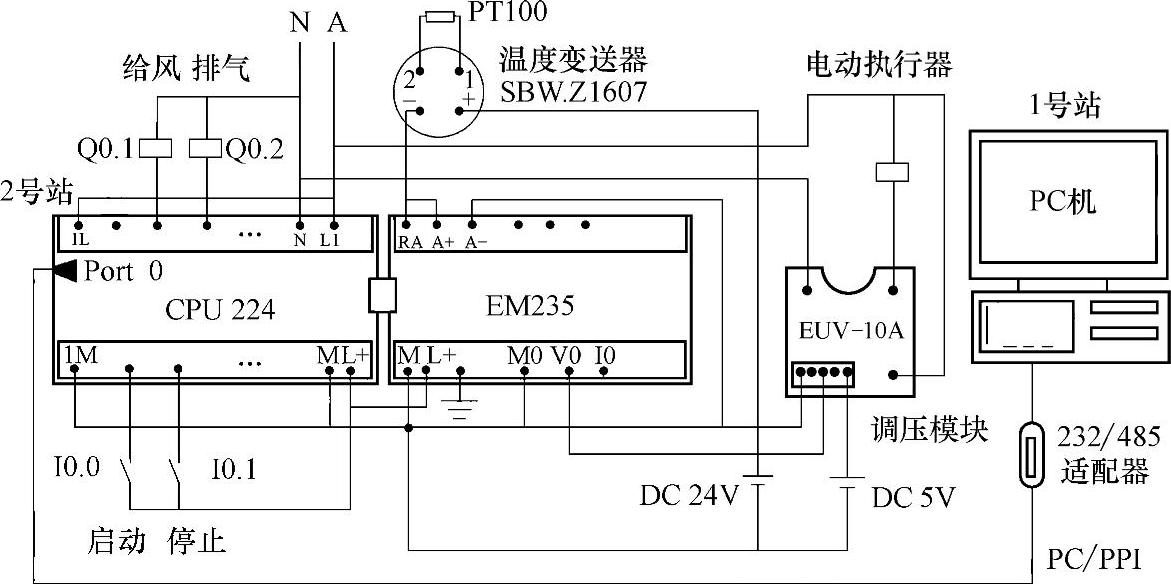
图11-80 养护窑PID控制的硬件设计图
表11-23 养护窑温度PID控制的内存变量分配表
虽然11.7.1节的PWM控制和这里的PID控制都用了PID算法,但前者使用脉冲量输出,由开关触点输出即可。这里的PID控制是把PID运算的输出通过调压模块输出,这是一种模拟量输出。
调压模块是一种输出可调的晶闸管控制。这里的调压模块的控制电压为0~5V,而EM235的输出电压为0~10V,因此,只能对EM235输入0~16000的数值(EM235的允许输入范围为0~32000)。
上述内容在控制程序的设计中不容忽视。
(1)PC机VB程序及其说明 PC机VB程序和PWM控制的VB程序相同,此处不再赘述。
(2)PLC程序设计
1)PID控制程序OB1及其说明。PID控制程序OB1如图11-81所示。
“Network1”的功能是上电后启动自由口通信,调用子程序SBS0(设置并启动定时中断)。
“Network2”的功能是当按下启动按钮时设置系统运行标志M0.0。
“Network3”的功能是启动系统运行计数器C0。(https://www.xing528.com)
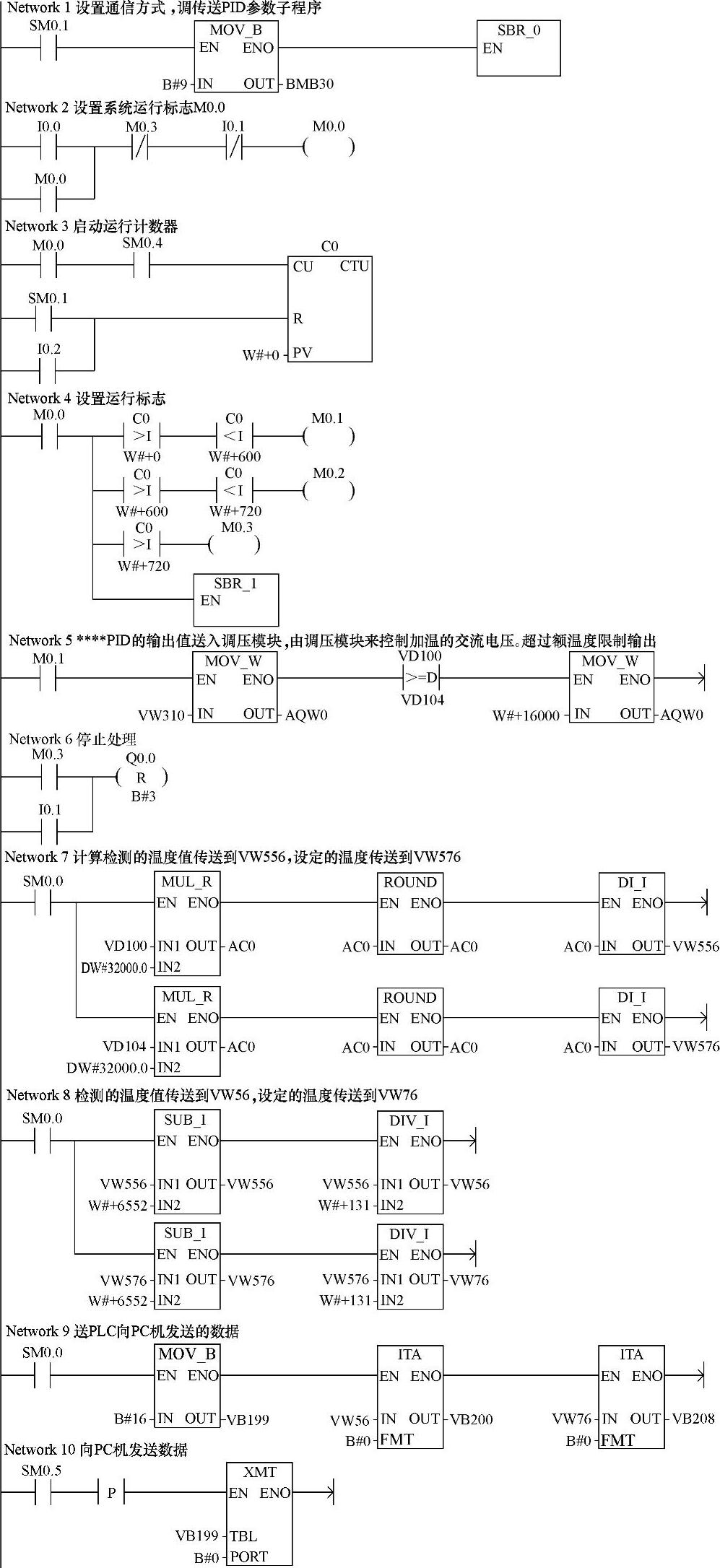
图11-81 温度PID控制程序OB1
“Network4”的功能是根据运行时间来设置系统运行阶段标志。M0.1为控温流程标志,M0.2为排气流程标志,M0.3为结束标志,然后调用子程序SBR1。
“Network5”的功能是把PID的输出值(VB310)送入EM235的D-A端(AQW0)。如果温度的测量值(VD100)大于设定值(VD104),关闭调压模块的输出。因为这里的AOW0=16000时,晶闸管的导通角为0,这是一种强制性保护。
“Network6”的功能是停止处理。
“Network7”的功能是传送检测值和设定值到输出显示区。
“Network8”的功能是将检测的温度值转换成单位为“度”的数据,并送入指定的显示数据区。
“Network9”的功能是把需要显示的数据转换成ASCII码。
“Network10”的功能是把需要显示的ASCII码不断地从通信口0发送。
2)PID控制程序SBR0及其说明。SBR0的功能是启动定时中断,把10送入SMB34中,表示定时中断的时间间隔为10ms,如图11-82所示。中断连接指令把中断程序0(INT0)和中断事件10(引起定时中断事件)连接,表示设置的是定时中断0,巨中断服务程序在INT0中,ENI是开中断。
3)PID控制程序SBR1及其说明。SBR1的功能是系统运行的通风和排气控制,如图11-83所示。第一阶段(M0.1=1)要开风机(Q0.1=1);第二阶段(M0.2=1)要排气(Q0.2=1);运行的结束阶段(M0.3=1)要关闭所有输出(Q0.0、Q0.1和Q0.2复位)。
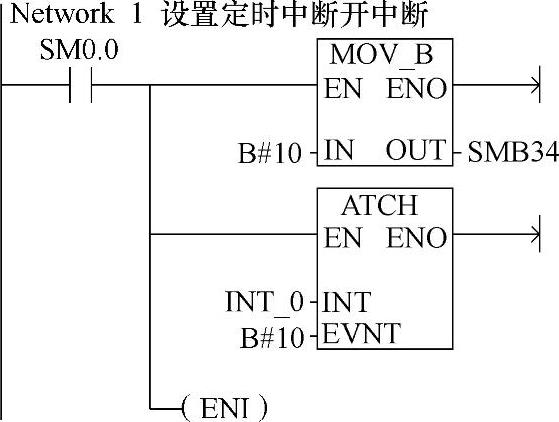
图11-82 温度PID控制程序SBR0
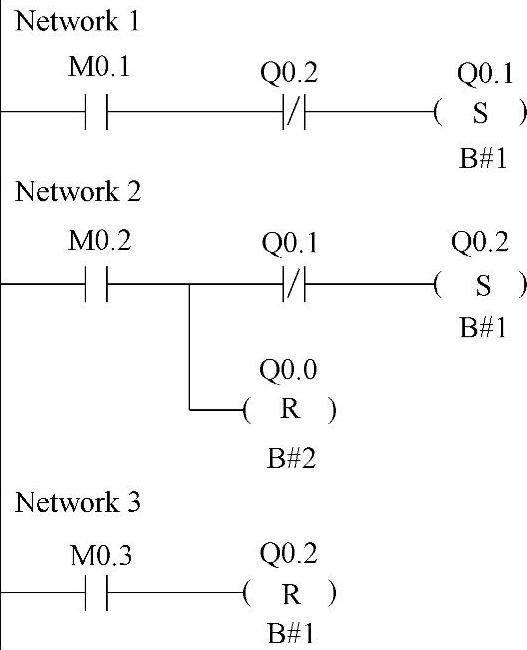
图11-83 温度PID控制程序SBR1
4)PID控制程序INT0及其说明。INT0的功能是定时读取检测的温度,根据给定的PID系数迸行PID运算,对系统迸行控制。INT0程序如图11-84所示。
“Network1”的功能是读取AIW0的数据并将其转换为标么值,送入VD100中。
“Network2”的功能是把各个PID系数送入PID数据表中。
“Network3”的功能是迸行PID运算,其输出值存于VD108。
“Network4”的功能是将PID的输出转换为调压模块的输入数宇量(0~16000)送入VW310中,再通过VW310把数据传送到AQW0输出。
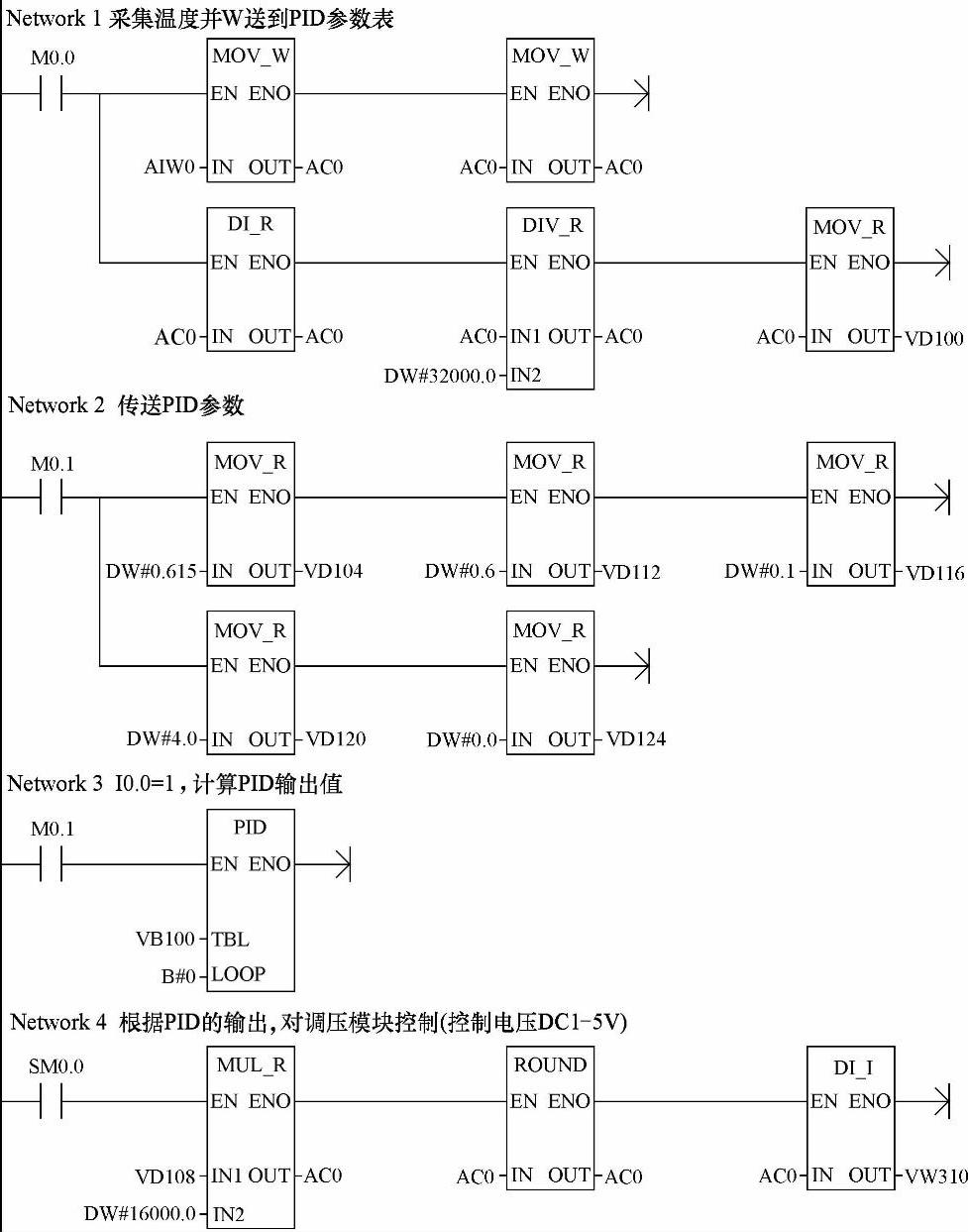
图11-84 温度PID控制程序INT0
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。