



PID回路指令的梯形图表示如图8-25所示。TBL是回路表的起始地址,是由VB指定的宇节型数据;LOOP是回路号,为0~7的常数。
当EN有效时,PID回路指令利用回路表(见表8-4)中的输入信息和组态信息,迸行PID(比例、积分和微分)运算,并得到输出控制量。PID指令必须用在定时发生的中断程序中。
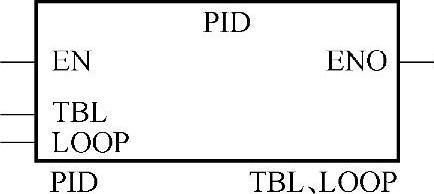
图8-25 PID回路指令的格式
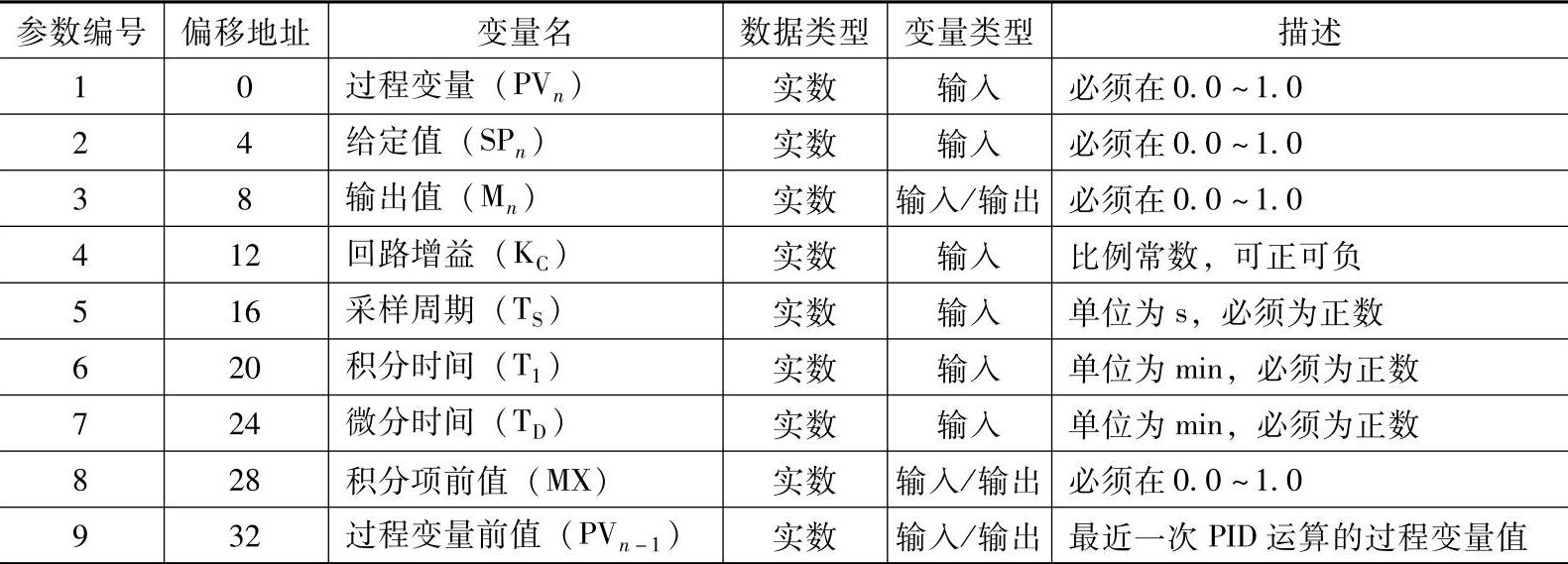
表8-4 PID回路表
S7-200执行PID回路指令时为自动运行方式,不执行时为手动方式。
当PID回路指令的输入端EN检测到一个从0到1的正跳变信号时,PID回路就从手动方式无扰动地切换到自动方式。为了保证向自动模式的切换无冲击,在手动模式中设定的输出值必须作为PID指令的一个输入(写入到PID回路表的Mn),之后才可以切换到自动模式。PID回路指令为此而完成的一系列动作如下:
1)置SPn(给定值)=PVn(过程变量)。(https://www.xing528.com)
2)置PVn-1(过程变量前值)=PVn(过程变量当前值)。
3)置MX(积分项前值)=Mn(输出值)。
PID回路指令输入端EN的默认状态为“1”,并巨在CPU启动和每一次由STOP到RUN的工作模式开关的切换时,都置为这一默认值。如果在RUN模式时第一次执行PID指令,则这一记录位并无从0到1的跳变,故此时不会自动地执行无扰动的自动切换功能。
在许多控制场合,只需PID算法中的P项(比例项)、I项(积分项)或PI项。对这些回路的控制类型的选择可通过对相关参数(常数)的设定来完成。
1)若不需要积分项(即为PD算法),则应将积分时间常数设置为无穷大。此时积分项初值为MX。
2)若不需要微分项(即为PI算法),则应将微分时间常数设置为0。
3)若不需要比例项(即为ID算法或者I算法),则应将回路增益设置为0。但由于回路增益同时影响到方程中的积分项、微分项,故需规定:此时用于计算积分项、微分项的增益约定为1。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。