



【摘要】:第⑤步是机械手在最右位开始下降,当机械手下降至工作台B到位时,机械手停止下降,第⑤步结束。第⑥步是机械手开始放松工件,所需时间大约10s,10s之后工件放开,第⑥步结束。机械手按照①下降→②夹紧→③上升→④右移→⑤下降→⑥松开→⑦上升→⑧左移的顺序依次运动,工作一个周期完成。等待工件在工作台A上出现则又开始第①步,机械手控制流程如图8-3所示。
搬运机械手将工件从点A向点B传送。其工作过程示意图如图8-2所示。
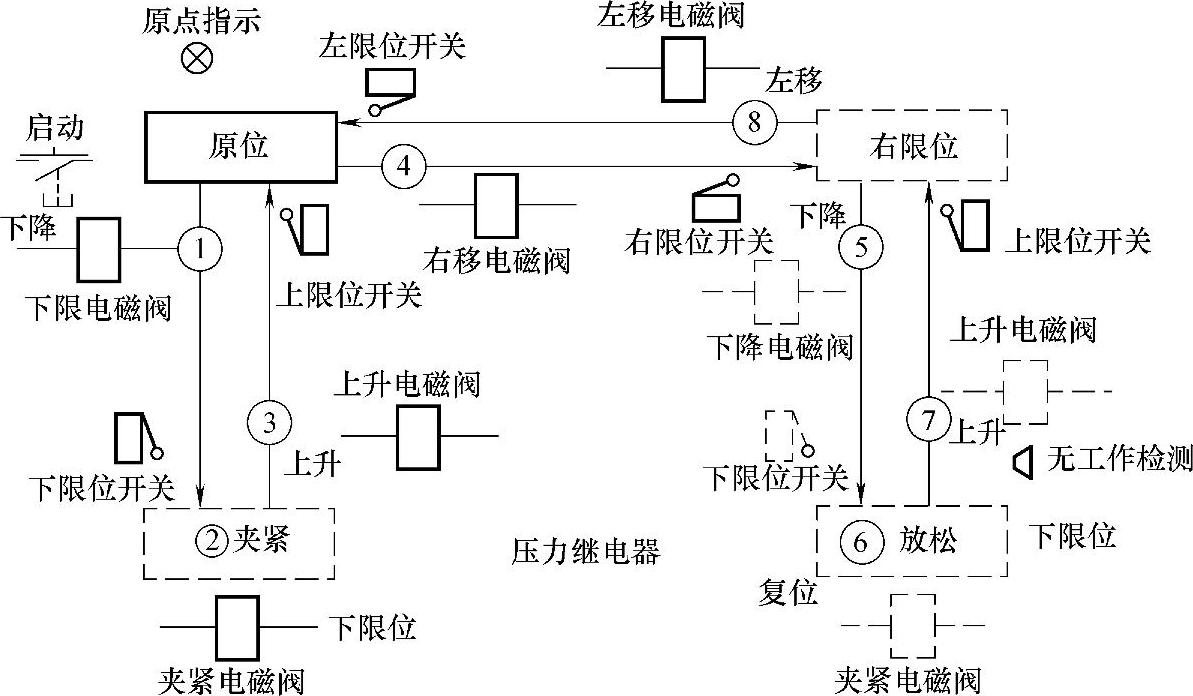
图8-2 机械手工作过程示意图
第①步是当工作台A上有工件出现时(可以由光电耦合器I0.3=ON检测到),机械手开始下降。当机械手下降到位时(可以由限位开关I0.5=ON检测到),机械手停止下降,第①步结束。
第②步是机械手在最低位开始抓紧工件,约10s(T101=0N)抓住、抓紧,第②步结束。
第③步是机械手抓紧工件上升,当机械手上升到位时(可以由限位开关I0.4=ON检测到),机械手停止上升,第③步结束。
第④步是机械手抓紧工件右移,当机械手右移到位时(可以由限位开关I0.7=ON检测到),机械手停止右移,第④步结束。
第⑤步是机械手在最右位开始下降,当机械手下降至工作台B到位时(可以由限位开关I0.5=ON检测到),机械手停止下降,第⑤步结束。(https://www.xing528.com)
第⑥步是机械手开始放松工件,所需时间大约10s(T102=ON),10s之后工件放开,第⑥步结束。
第⑦步是机械手开始上升,机械手上升到位时(可以由限位开关I0.4=ON检测到),停止上升,第⑦步结束。
第⑧步是机械手在高位开始左移,当左移到位时(可以由限位开关I0.6=ON检测到),机械手停止左移。第⑧步结束。
机械手按照①下降→②夹紧→③上升→④右移→⑤下降→⑥松开→⑦上升→⑧左移的顺序依次运动,工作一个周期完成。等待工件在工作台A上出现则又开始第①步,机械手控制流程如图8-3所示。
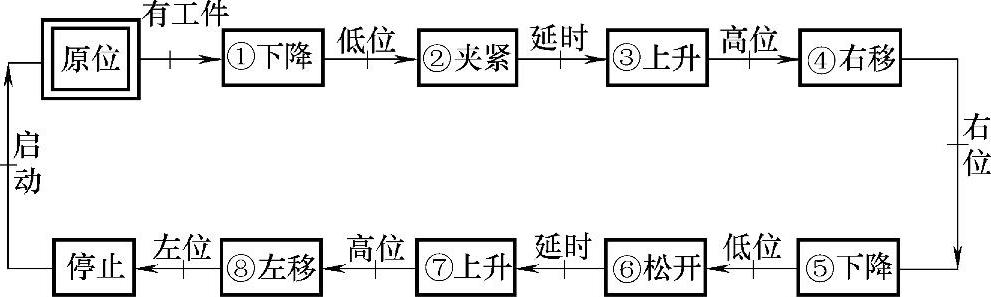
图8-3 机械手控制流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。