



1.用“启-保-停”电路的顺序控制设计法设计小车往返控制
“启-保-停”电路仅仅使用与触点和线圈有关的指令,任何一种PLC的指令系统都有这一类指令,因此这是一种通用的编程方法,可以用于任意型号的PLC。
(1)画出小车往返控制的顺序功能图 设计PLC顺序控制梯形图程序,通常的做法是先画出PLC控制的顺序功能图。对于图5-19所示的状态图,如果把每一个状态都用一个软元件——位存储单元来表示,如“停止待命”状态用M0.0来表示,“左行”状态用M0.1来表示,“装料”状态用M0.2来表示,“右行”状态用M0.3来表示,“卸料”状态用M0.4来表示。每一个状态之间的转换,都需要有一定的条件,这些条件可能是外部的,如“左行命令”即I0.1;也可能是内部的,如“20s后装料完成”即T37定时时间到。那么图5-19可以画成图5-20所示的图,即用符号来描述小车往返控制的状态转换图,亦即顺序功能图。把每个状态中需要PLC输出的量或者是控制的量标注在每个状态后面。
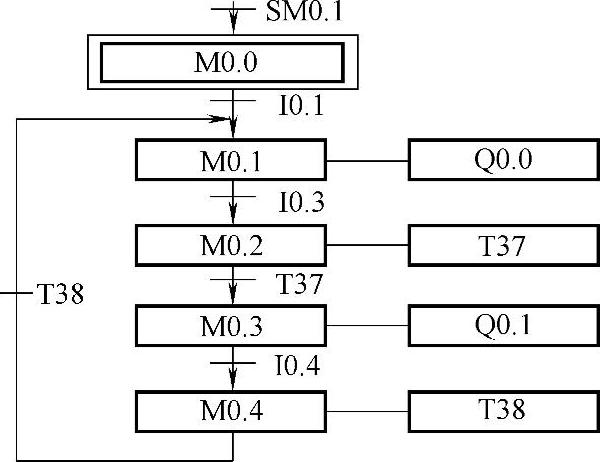
图5-20 小车往返控制的顺序功能图
(2)设计PLC顺序控制梯形图程序 根据顺序功能图,设计“启-保-停”电路的关键是找出它的启动条件和停止条件。根据转换实现的基本规则,转换实现的条件是它的前级步为活动步,并巨满足相应的转换条件,步M0.1变为活动步的条件是它的前级步M0.0为活动步,巨二者之间的转换条件I0.1为1。在“启-保-停”电路中,则应将代表前级步的M0.0的常开触点和代表转换条件的I0.1的常开触点串联,作为控制M0.1的启动电路。
当M0.1和I0.3的常开触点均闭合时,步M0.2变为活动步,这时步M0.1应变为不活动步,因此可以将M0.2为1作为使存储器位M0.1变为OFF的条件,即将M0.2的常闭触点与M0.1的线圈串联。
根据上述的编程方法和顺序功能图,很容易画出小车往返控制的梯形图,如图5-21所示。PLC开始运行时应将M0.0置为1,否则系统无法工作,故将仅在第一个扫描周期接通的SM0.1的常开触点作为启动电路,启动电路还并联了M0.0的自保持触点,后续步M0.1的常闭触点与M0.0的线圈串联,M0.1为1时M0.0的线圈“断电”,初始步变为不活动步。
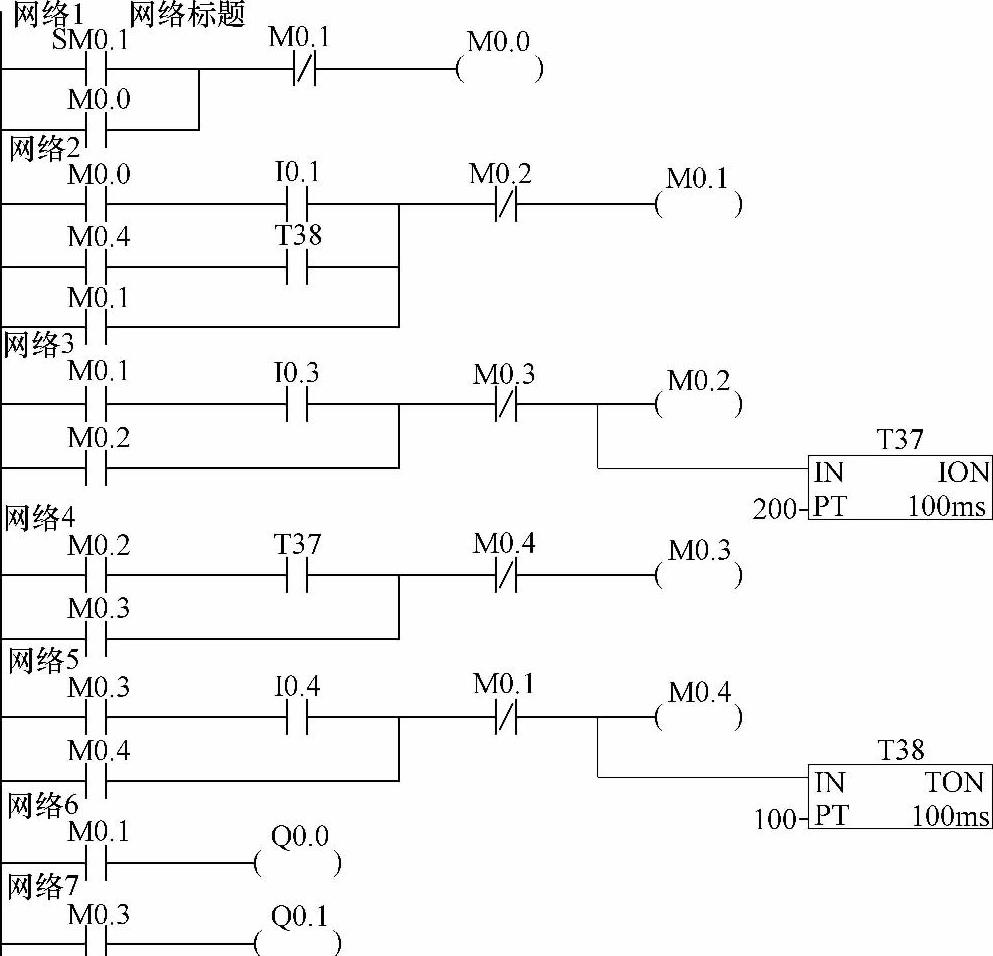
图5-21 小车往返顺序控制梯形图
以步M0.1为例,由顺序功能图可知,M0.0、M0.4是它的前级步,M0.0向M0.1转换的条件是I0.1的常开触点接通,M0.4向M0.1转换的条件是定时器T38的常开触点接通,所以应将M0.0和I0.1的常开触点串联,作为M0.1的启动电路,同时将M0.4和T38的常开触点串联,作为M0.1的启动电路,两个启动电路并联,启动电路还并联了M0.1的自保持触点。后续步M0.2的常闭触点与M0.1的线圈串联,M0.2为1时M0.1的线圈“断电”,初始步变为不活动步。程序见图5-21中的网络2。
当控制M0.1的“启-保-停”电路的启动电路接通后,M0.1的常闭触点使M0.0的线圈断电,在下一个扫描周期,因后者的常开触点断开,使M0.0的启动电路断开,由此可知“启-保-停”电路的启动电路接通的时间只有一个扫描周期。因此必须使用有记忆功能的电路(例如“启-保-停”电路或置位复位电路)来控制代表步的存储器位。
下面介绍设计顺序控制梯形图的输出电路部分的方法。由于步是根据输出变量的状态变化来划分的,它们之间的关系极为简单,可以分为两种情况来处理:
1)某一输出量仅在某一步中为ON,例如图5-21的Q0.0就属于这种情况。可以将它的线圈与对应步的存储器位M0.1的线圈串联。
有的人也许会认为,既然如此,不如用这些输出来代表该步,例如用Q0.0代替M0.1。当然这样做可以节省一些编程元件,但是存储器位M是完全够用的,多用一些不会增加硬件费用,在设计和输入程序时也多花不了多少时间。全部用存储器位来代表步,具有概念清楚、编程规范、梯形图易于阅读和查错的优点。
2)某一输出在几步中都为ON,应将代表各有关步的存储器位的常开触点并联后,驱动该输出的线圈,称为集中输出。(https://www.xing528.com)
2.用SCR指令的顺序控制设计法设计小车往返控制
S7-200中的顺序控制继电器S专门用于编制顺序控制程序。顺序控制程序被顺序控制继电器指令SCR分为LSCR与SCRE指令之间的若干个SCR段,一个SCR段对应于顺序功能图中的一步。
装载顺序控制继电器(Load Sequence Control Relay)指令“LSCRS¯bit”用来表示一个SCR段(即顺序功能图中的步)的开始。指令中的操作数S¯bit为顺序控制继电器S(Bool型)的地址,顺序控制继电器为1状态时,执行对应的SCR段中的程序,反之则不执行。
顺序控制继电器结束(Sequence Control Relay End)指令SCRE用来表示SCR段的结束。
顺序控制继电器转换(Sequence Control Relay Transition)指令“SCRTS_bit”用来表示SCR段之间的转换,即步的活动状态的转换。当SCRT线圈“得电”时,SCRT指令中指定的顺序功能图中的后续步对应的顺序控制继电器变为1状态,同时当前活动步对应的顺序控制继电器被系统程序复位为0状态,当前步变为不活动步。
使用SCR时有以下的限制:不能在不同的程序中使用相同的S位;不能在SCR段之间使用JMP及LBL指令,即不允许用跳转的方法跳入或跳出SCR段;不能在SCR段中使用FOR、NEXT和END指令。
图5-22a是小车往返控制的示意图和顺序功能图。设小车在初始位置时停在左边,限位开关I0.2为1状态。按下启动按钮I0.0后,小车向右运动(简称右行),碰到限位开关I0.1后,停在该处,3s后开始左行,碰到I0.2后返回初始步,停止运动。根据Q0.0和Q0.1状态的变化,显然一个工作周期可以分为左行、暂停和右行三步,另外还应设置等待启动的初始步,并分别用S0.0~S0.3来代表这四步。启动按钮I0.0和限位开关的常开触点、T37延时接通的常开触电是各步之间的转换条件。
设计梯形图,如图5-22b所示,用LSCR(梯形图中为SCR)和SCRE指令表示SCR段的开始和结束。在SCR段中用SM0.0的常开触点来驱动在该步中应为1状态的输出点(Q)的线圈,并用转换条件对应的触点或电路来驱动转换到后续步的SCRT指令。
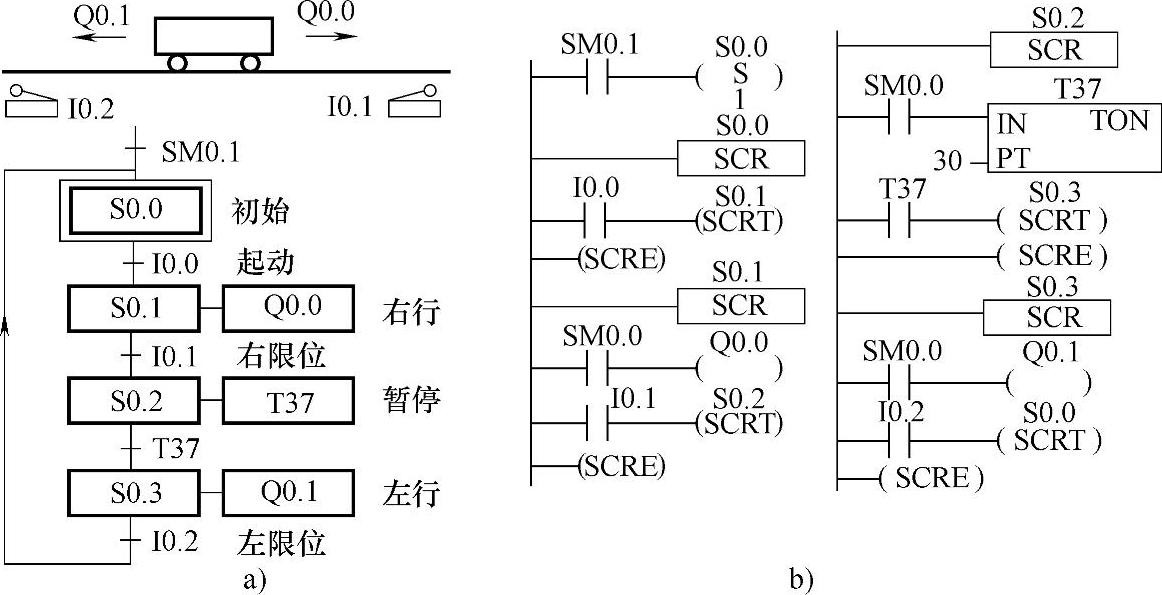
图5-22 用SCR指令的顺序控制设计法设计小车往返控制
a)小车往返控制的示意图和顺序功能图 b)小车往返控制的梯形图程序
如果用编程软件的“程序状态”功能来监视处于运行模式的梯形图,可以看到因为直接接在左侧电源线上,每一个SCR方框都是蓝色的,但是只有活动步对应的SCRE线圈通电,并巨只有活动步对应的SCR区内的SM0.0的常开触点闭合。不活动步的SCR区内的SM0.0的常开触点处于断开状态,因此SCR区内的线圈受到对应的顺序控制继电器的控制,SCR区内的图还可以受与它串联的触点的控制。
首次扫描时SW0.1的常开触点接通一个扫描周期,使顺序控制继电器S0.0置位,初始步变为活动步,只执行S0.0对应的SCR段。如果小车在最左边,I0.2为1状态,此时按下启动按钮I0.0,指令“SCRTS0.1”对应的线圈得电,使S0.1变为1状态,操作系统使SM0.0变为0状态,系统从初始步转换到右行步,只执行S0.1对应的SCR段。在该段中,SM0.0的常开触点闭合,Q0.0的线圈得电,小车右行。在操作系统没有执行S0.1对应的SCR段时,Q0.0线圈不会通电。
右行碰到右限位开关时,I0.1的常开触点闭合,将实现右行步S0.1到暂停步S0.2的转换,定时器T37用来使暂停步持续3s。延时时间到T37的常开触点接通,使系统由暂停步转换到左行步S0.3,直到返回初始步。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。