



第6章研究了展成蜗杆时虚拟产形面Σd上的啮合界线Φdφ、环面蜗杆螺旋面Σ1及其上的曲率干涉界线Ψd,第7章研究了展成蜗轮时环面蜗杆螺旋面Σ1上的啮合界线Φφ1、蜗轮齿面Σ2及其上的曲率干涉界线Ψ和瞬时接触线奇点轨迹曲线N以及瞬时接触线,这些界线在一定条件下才会在蜗杆螺旋面和蜗轮齿面上出现。
蜗杆螺旋面和蜗轮齿面有一定的高度和宽度,齿面接触区被限制在这个高度和宽度范围内;残留的前、后过渡曲面又覆盖掉蜗轮齿面接触区的一部分。因此,需要计算出接触区边界,确定这些曲线是否在蜗杆螺旋面和蜗轮齿面上,以及在蜗杆螺旋面和蜗轮齿面上的位置,绘制接触区图形,以便进行宏观啮合质量评价。
为了使接触区图形直观、清楚地表达接触区在蜗杆螺旋面和蜗轮齿面上的位置及对应关系,在蜗轮轴截面内坐标系(O2;RB,z02)里绘出蜗轮齿面的边界线,将蜗杆齿面接触区的边界线投影到(O1;y01,z01)坐标平面上。
图8-2为蜗杆螺旋面边界:半径Ra1的蜗杆齿顶圆弧为螺旋面顶部的边界,由它确定蜗轮齿根部的接触区边界线;由蜗杆工作长度Lw确定的垂直于蜗杆轴线的平面与蜗杆螺旋面的交线为R1和L1。对于滚刀而言:R1为啮入端近似的第一刀刃,加工出蜗轮的前过渡曲面C1;L1为啮出端近似的末刀刃,加工出蜗轮的后过渡曲面C2。对于蜗杆而言,由交线R1确定接触区与前过渡曲面C1的切线,由交线L1确定接触区与后过渡曲面C2的切线。
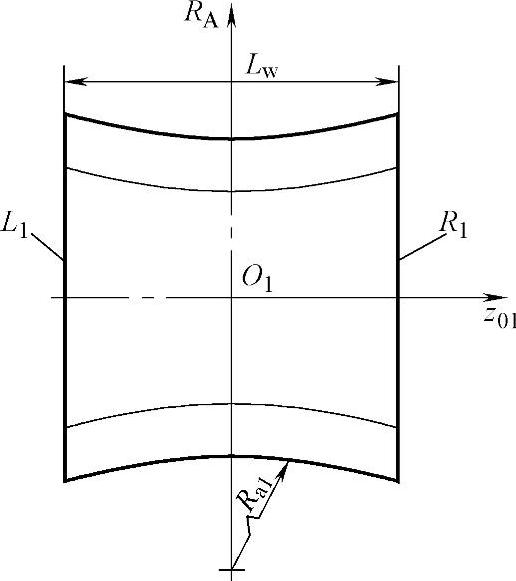
图8-2 蜗杆螺旋面的边界图
图8-3为蜗轮齿面的边界:半径为Ra2圆弧形成的圆环面和直径为dea2的圆柱面构成蜗轮齿顶面,由它确定蜗杆螺旋面根部的接触区边界线;蜗轮两端30°倒角,锥面R2和L2确定蜗杆啮入端的边界线。
1.蜗杆螺旋面的边界条件
(1)蜗杆齿顶圆弧的边界条件
图8-2取坐标系(O1;z01,RA),蜗杆齿顶环面上的点必须满足下面条件:
(a-RA)2+z21-R2a1=0 (8-1)
式中RA见式(7-97)。
(2)蜗杆啮入端R1的边界条件
如图8-2所示,由蜗杆工作长度Lw得到
z1=0.5Lw (8-2)
(3)蜗杆啮出端L1的边界条件
如图8-2所示,由蜗杆工作长度Lw得到
z1=-0.5Lw (8-3)
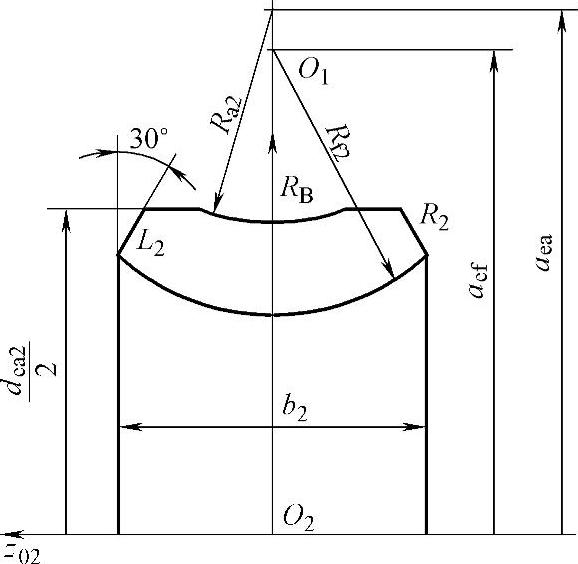
图8-3 蜗轮齿面的边界
2.蜗轮齿面的边界条件
(1)蜗轮齿顶圆弧的边界条件
图8-3取坐标系(O2;z02,RB),蜗轮齿顶环面上的点必须满足下面条件:
(aea-RB)2+z22-R2a2=0 (8-4)
aea=0.5da2+Ra2 (8-5)
式中RB见式(7-99)。
(2)蜗轮齿根圆弧的边界条件
如图8-3所示,在坐标系(O2;z02,RB)里,蜗轮齿根环面上的点必须满足下面条件:
(aef-RB)2+z22-R2f2=0 (8-6)
Rf2=0.5da1+c (8-7)
aef=0.5df2+Rf2 (8-8)
(3)蜗轮外圆边界条件
如图8-3所示,由蜗轮齿顶圆最大直径dea2得到
RB=0.5dea2 (8-9)
(4)蜗轮R2端倒角锥面的边界条件
由图8-3得到

(5)蜗轮L2端倒角锥面的边界条件(https://www.xing528.com)
由图8-3得到

3.界线的求解
啮合界线、曲率干涉界线和接触线奇点轨迹曲线的方程在第7章里已得到。齿面接触区各边界条件方程与啮合面方程联立求解,即可得到啮合面上接触区边界线。再将各界线变换到坐标系(O2;RB,z02)里,绘出蜗轮轴线截面内接触区边界线;变换到坐标系(O1;y01,z01)里,绘出啮合面边界的投影。
为了清楚地表达蜗轮齿面上界线各界点,给各界点命名,如图8-4所示。其中点G′满足式(8-9)和下式:

点I′满足式(8-9)和下式:

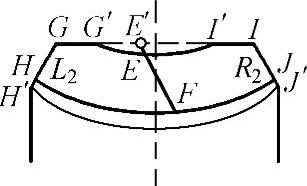
图8-4 蜗轮齿面上的边界点图
点E′不是蜗轮齿面上的边界点,但为了后续计算,需要计算该点。点E′在蜗轮齿面上瞬时接触线奇点轨迹曲线上,并且在蜗轮外圆上,所以满足式(7-62)和式(8-9)。
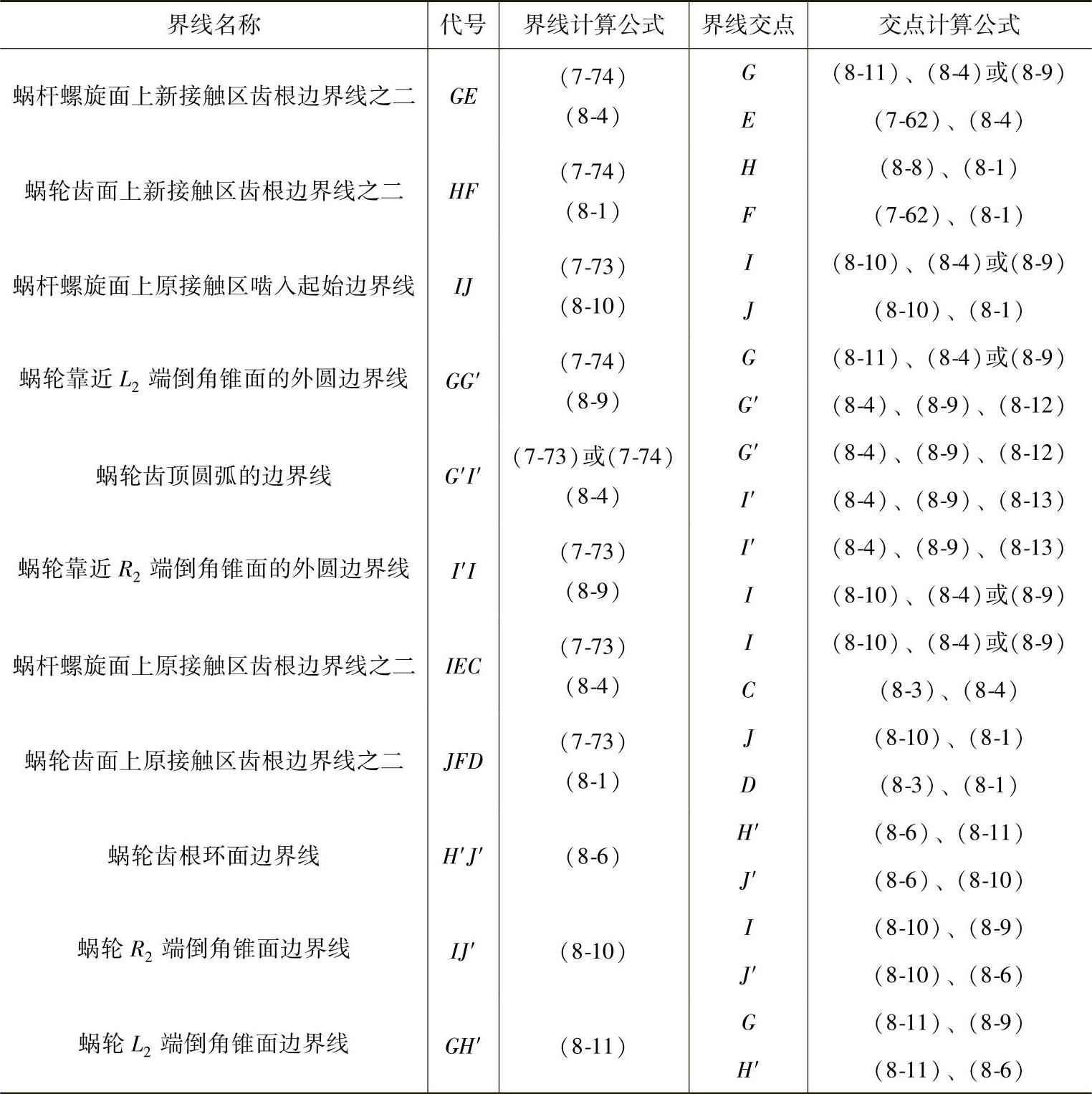
蜗杆和蜗轮齿面接触区边界线和边界点的计算公式见表8-2,但并非所有边界线都在齿面上,这取决于传动类型和设计参数:图8-5为双自由度直线标准环面蜗杆传动的接触区边界图,边界线A′B′和AB都不在蜗轮齿面上出现。
表8 - 2 双自由度直线标准环面蜗杆副接触区边界线的计算公式
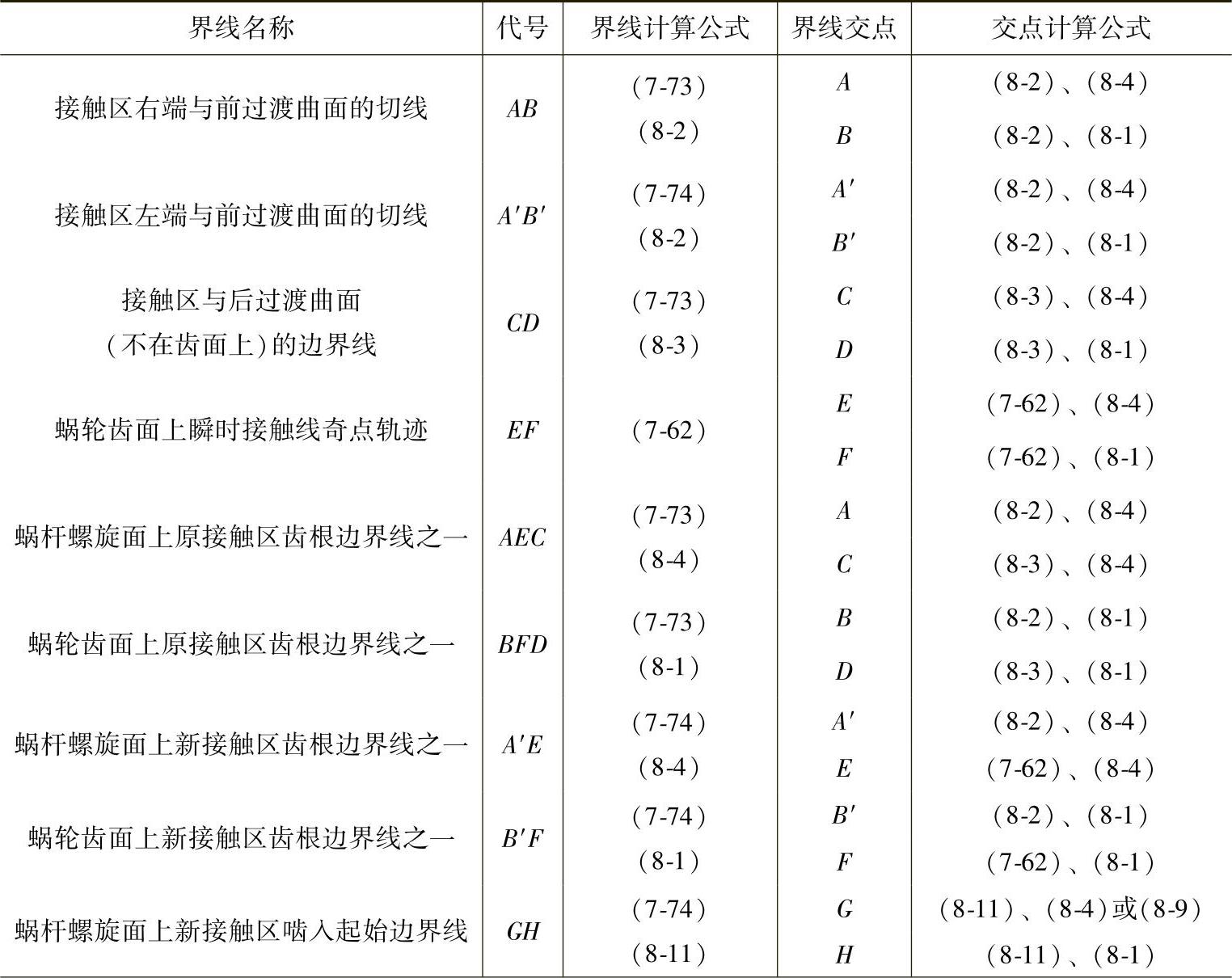
(续)
关于点I的求解,可以采用下述简单方法求解:由蜗杆切齿啮合共轭条件方程、φ=φ1和点I在坐标系(O2;RB,z02)里的位置可得到点I的参数(u,δ,φ=φ1)。
因为原接触区是展成蜗杆的虚拟产形面Σd在蜗轮齿面上的再现,所以由蜗轮上点的z2值可直接求出对应点的δ值为

右接触区外圆上点的u值不变,都等于蜗轮外圆与N线交点E′的u,所以计算就简单了:从E′点计算到I点,按z2分段计算。已知u和δ,由切齿啮合共轭条件方程式(6-60)可解出φ。解法如下:
将式(6-59)整理得

式(8-15)两边同时除以 得
得
令
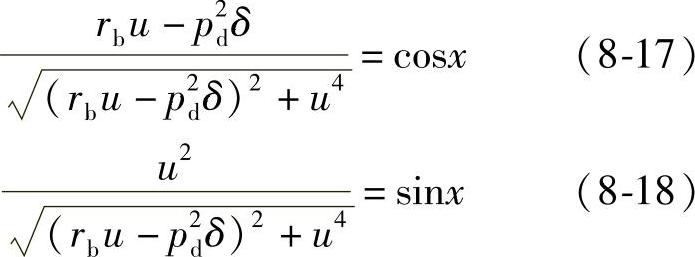
则有

解得

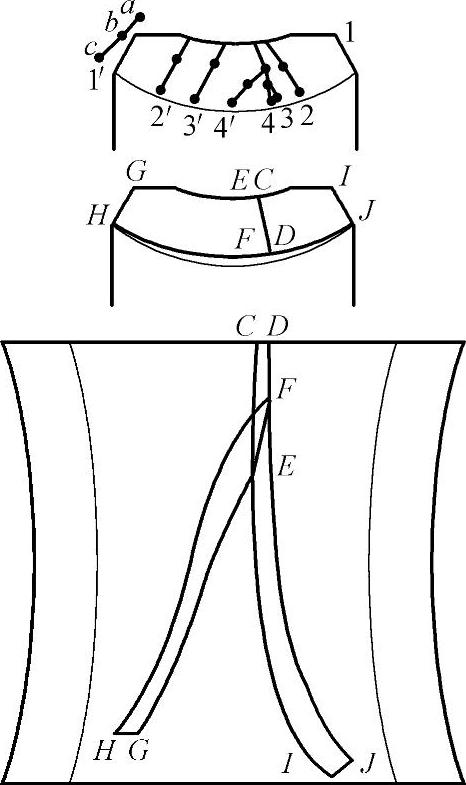
图8-5 双自由度直线环面蜗杆副的接触区边界图
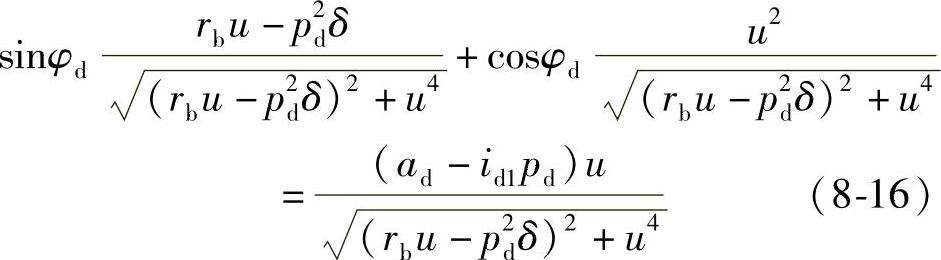
将式(8-17)和式(8-18)代入式(8-16),整理得

将φd=id1φ+δ代入式(8-21)得

给定δ和u,由式(8-22)可解得φ。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。