



直线刀刃Γd双自由度展成环面蜗杆1的齿面Σ1,选用的坐标系与图2-2相同。环面蜗杆1和刀座的轴交角Σ=90°,曲线刀刃退化为直线刀刃Γd,直线刀刃Γd与环面蜗杆1相对位置和所选坐标系如图6-2所示。
取动坐标系σd(Od;id,jd,kd)与刀座固连、σ1(O1;i1,j1,k1)与环面蜗杆1固连,kd和k1分别与刀座和环面蜗杆1的轴线重合,坐标原点O1为环面蜗杆1和刀座的两轴线公垂线在环面蜗杆1轴线上的垂足,也为环面蜗杆1的中间平面与其轴线的交点,Od为直线刀刃所在垂直于刀座轴线的平面与刀座轴线的交点。
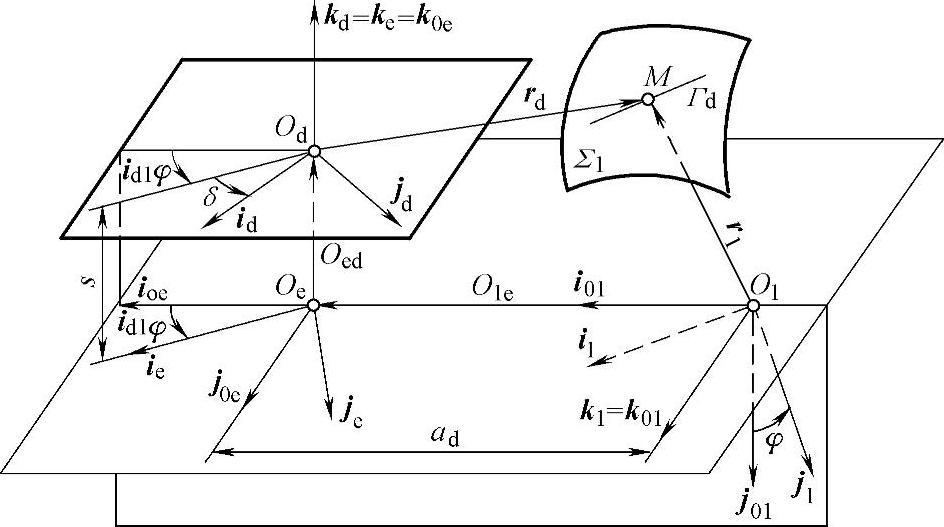
图6-2 直线刀刃Γd与工件相对位置和所选坐标系
取静坐标系σ01(O1;i01,j01,k01)与机架固连,k1=k01,环面蜗杆绕k01回转,转角为φ,在初始位置时σ1与σ01重合,φ=0。
取辅助静坐标系σ0e(O0e;i0e,j0e,k0e)与机架固连,i0e=i01,j0e=k01,k0e=kd,坐标原点Oe为环面蜗杆1和刀座的两轴线公垂线在刀座轴线上的垂足。ad=|O1Oe|=|O1e|为环面蜗杆1和刀座的两轴线公垂线段长度,ad=a+Δa,a为蜗杆副中心距,Δa为中心距修形量,不修形时Δa=0。
取辅助动坐标系σe(Oe;ie,je,ke),ke=k0e,σe绕k0e回转,转角为id1φ,在初始位置时σe与σ0e重合,id1φ=0,其中id1=1/i1d,i1d=i12+Δi,i12为蜗杆副的传动比,Δi为加工环面蜗杆1时传动比的修形量,不修形时Δi=0。s=OeOd=Oed为刀座沿刀座回转轴线的位移,s=pdδ,pd为直线刀刃Γd相对于σe运动的螺旋参数,δ为直线刀刃Γd相对于σe转动的角度。(https://www.xing528.com)
转角δ和φ为独立运动参数,当环面蜗杆1回转φ角、刀座沿刀座轴线移动s=pdδ时,刀座转角φd=id1φ+δ。当δ=φ=0时,φd=0,s=0,σd和σe与σ0e重合。
在σ0e里有
(Oed)0e=pdδk0e (6-1)
(O1e)0e=adi0e (6-2)
于是
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。