



通常取两角速度矢量ω1和ω2夹角的补角为轴交角Σ(见图5-1)。两轴平行为其特例,外啮合传动Σ=0°,内啮合传动Σ=180°;交错轴齿轮传动则0°<Σ<180°,Σ总为正值。
在轮1渐开螺旋面齿面Σ1的方程式(4-8)中,规定右旋齿轮螺旋参数p1为正,因而分度圆螺旋角β1、节圆螺旋角β′1和基圆螺旋角βb1均取正值;左旋齿轮p1和基圆螺旋角βb1等均取负值。齿轮2的规定与此相同。需要对式(4-5)的应用,给出不同情况的通用计算公式。
如图5-1a、b所示,按角速度矢量ω1和ω2的回转方向,轴交角Σ≤90°。图5-1a中齿轮1置于齿轮2之下;图5-1b中齿轮1置于齿轮2之上。图5-1c和d中,保持ω1的方向不变,改变齿轮2的回转方向,即改变ω2方向,则Σ>90°。图5-1c中齿轮1下置,图5-1d中齿轮1上置。
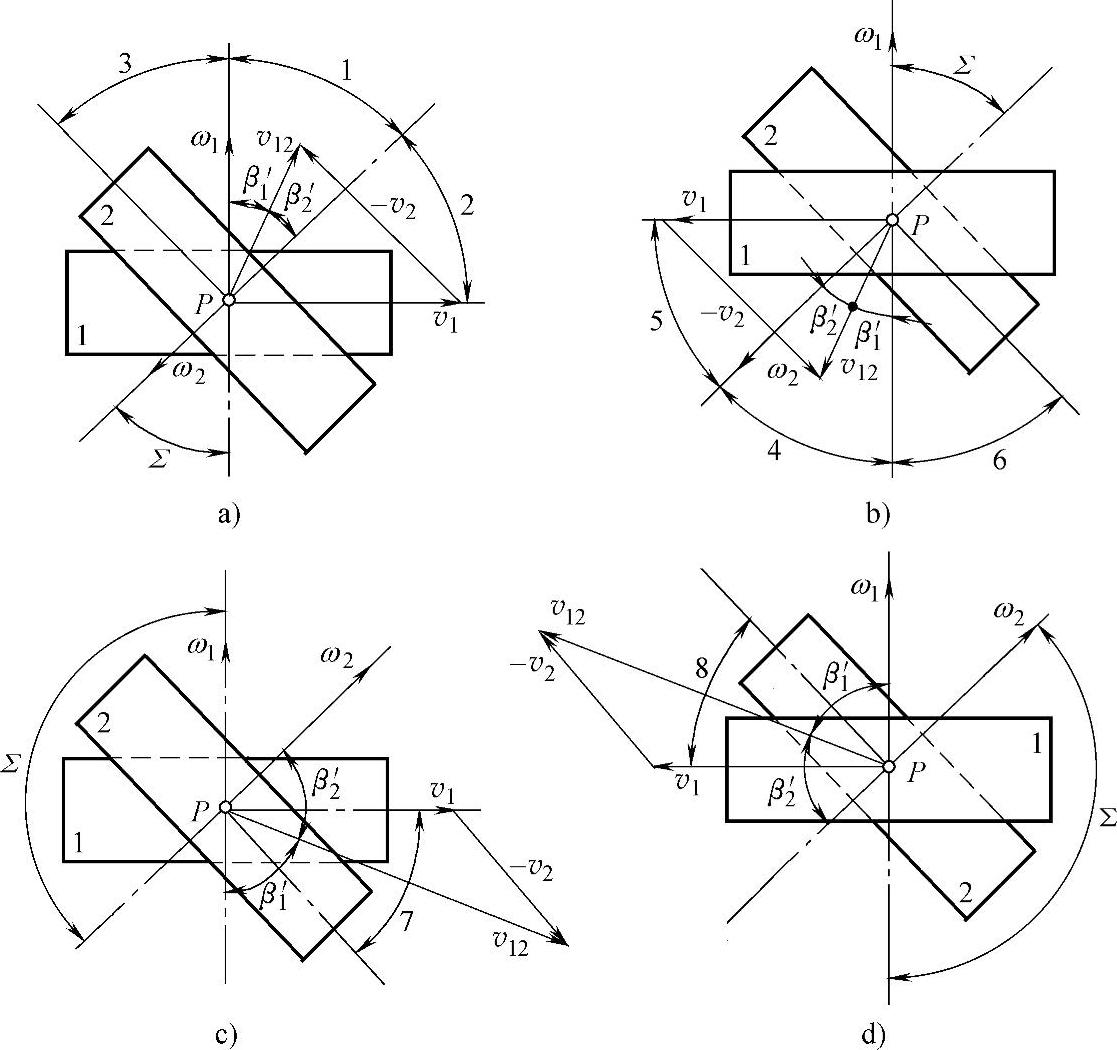
图5-1 轴交角与螺旋方向
a)Σ≤90°,齿轮1下置 b)Σ≤90°,齿轮1上置 c)Σ>90°,齿轮1下置 d)Σ>90°,齿轮1上置
齿线的方向应与节点P的两轮相对速度v12的方向一致,因此可以根据v12方向确定齿轮的螺旋方向和螺旋角的大小。在各图上过节点P,作节点P相对速度v12=v1-v2的矢量图。
如图5-1a所示,v12处于“1”区时,齿轮1和齿轮2齿的螺旋方向均为右旋。随着v2的减小β′1增大,β′2减小。当β′1>Σ时,v12处于“2”区,齿轮1右旋,齿轮2左旋。随着v2增大,β′1减小,β2′增大。当β′2>Σ时,v12处于“3”区,齿轮1左旋,齿轮2右旋。图5-1d中,v12处于“8”区,在这种情况下,齿轮1和齿轮2都只能是右旋齿轮。对于图5-1a和图5-1d这两种情况,轴交角与两轮节圆螺旋角之间的关系为(https://www.xing528.com)
Σ=β′1+β′2 (5-1)
如图5-1b所示,v12处于“4”区时,齿轮1和齿轮2都为左旋齿轮,当v12处于“5”区时,β′1>Σ,齿轮1左旋,齿轮2右旋。当v12处于“6”区时,β′2>Σ,齿轮1右旋,齿轮2左旋。图5-1c中,v12处于“7”区,齿轮1和齿轮2都只能是左旋齿轮。对于图5-1b和图5-1c这两种情况,轴交角与两轮节圆螺旋角之间的关系为
Σ=-(β′1+β′2) (5-2)
根据式(5-1)和式(5-2),在考虑螺旋角的符号的情况下,计算轴交角的通式为
Σ=β′1+β′2 (5-3)
也可以用另一种方式表达式(4-5),两轮螺旋方向相同时,β′1和β′2均取正号,螺旋方向相反时,绝对值小者取负号。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。