



将式(4-8)进行σ1→σ01坐标变换,得
(r1)01=rb1e01(ε)-rb1θ1g01(ε)+p1μk01 (4-56)
将式(4-52)和式(4-53)代入式(4-56),得到啮合线在σ01里的方程为

当 时
时

啮合线通过节点P。
将式(4-57)对θ1求导得

(t1)01是常矢量,啮合线是一条直线,由e01( )到(t1)01的有向角λ1=βb1。
)到(t1)01的有向角λ1=βb1。
根据上面得到的结果,图4-4绘出啮合线相对于轮1的位置。切齿啮合线是一条直线,它通过节点P,与轮1基圆柱相切,与渐开螺旋面直母线垂直。
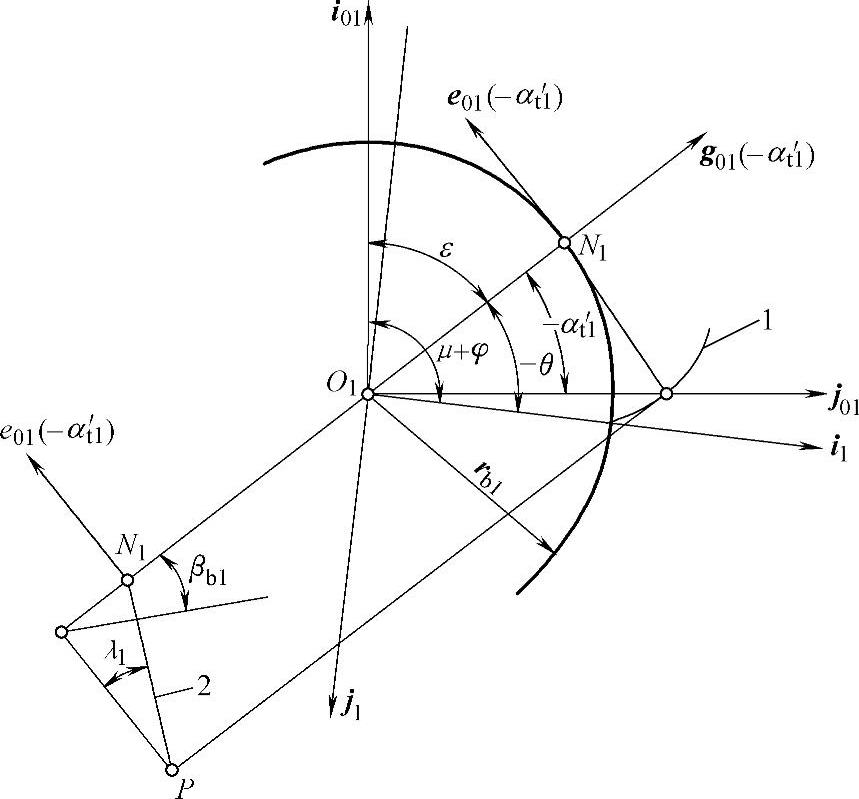
图4-4 啮合线相对于轮1的位置
1—轮1渐开线齿廓 2—切齿啮合线
将式(4-57)展开为
在σ02里切齿啮合线的方程为

将式(4-59)代入式(4-63),并利用式(4-2)进行σ01→σ02坐标变换得

式(4-64)展开后得

将式(4-60)~式(4-62)以及Σ=β′1+β′2代入式(4-65)得


将式(4-66)对θ1求导得

由  (https://www.xing528.com)
(https://www.xing528.com)
得到 
将式(4-71)代入式(4-70)得
式(4-72)中双符号项,上面符号用于轮2齿的“正侧面”,下面符号用于齿的“负侧面”。
啮合线是直线,由e02(180°±α′t2)到(t)02的有向角λ2=βb2。
式(4-66)中(r′)02在垂直于k02轴线的平面内的分量为

在啮合线上的垂足N2、径矢(R′2)02应满足下面条件:

将式(4-72)和式(4-74)代入式(4-75)得

将式(4-67)和式(4-68)代入式(4-76)得

将式(4-77)代入式(4-67)得

将式(4-77)代入式(4-68)得

将式(4-78)和式(4-79)代入式(4-74)得

上式可以写成

由上式可知,啮合直线与轮2轴线间公垂线的长度为

根据以上结果绘出与轮1“负侧面”相啮合的轮2“正侧面”位置示意图4-5。切齿啮合直线与半径为|R2|=rb2的圆柱相切。由e02(180°+α′t2)到切齿啮合线的有向角为λ2=βb2。
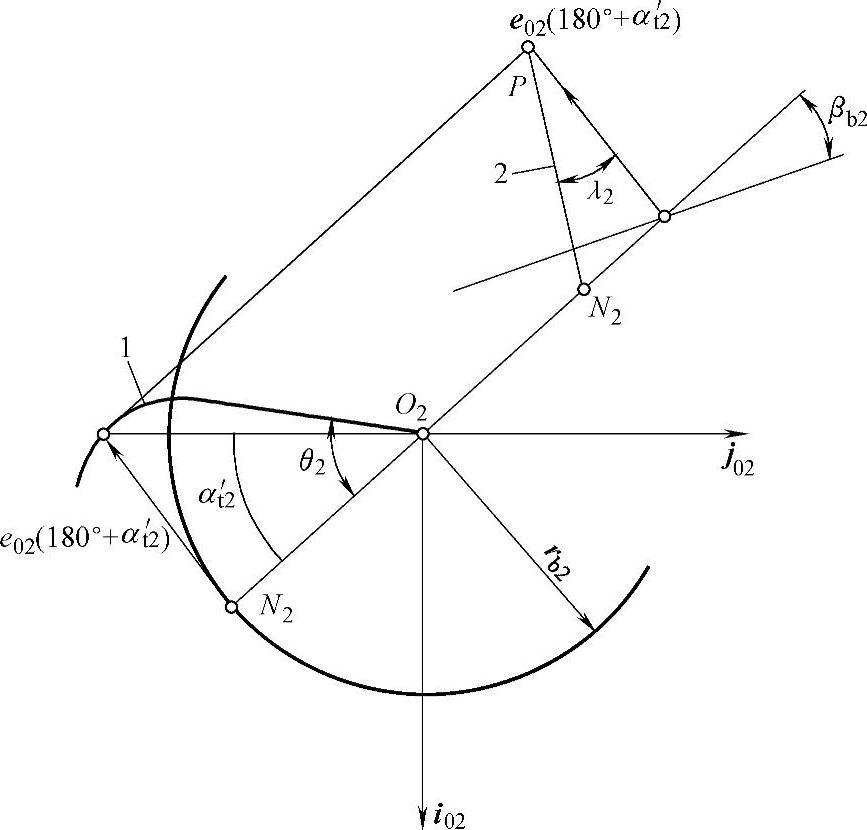
图4-5 啮合线相对于轮2的位置
1—轮2渐开线齿廓 2—切齿啮合线
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。