



【摘要】:如图3-3所示,在坐标系σ1里,使i1轴过半径为rb1的基圆上渐开线始点。利用圆矢量函数,在σ1里得到齿轮1的渐开线柱面Σ1的方程为1=rb1e1(θ)-rb1θg1(θ)+uk1 (3-1)式中,u、θ为渐开柱面Σ1的参数。
如图3-3所示,在坐标系σ1里,使i1轴过半径为rb1的基圆上渐开线始点。利用圆矢量函数(见附录A),在σ1里得到齿轮1的渐开线柱面Σ1的方程为
(r1)1=rb1e1(θ)-rb1θg1(θ)+uk1 (3-1)
式中,u、θ为渐开柱面Σ1的参数。u为常数,得到渐开线齿廓(θ曲线);θ为常数,得到渐开线柱面直母线(u直线)。由式(3-1),在σ1里(r1)1的一阶偏导数为
(r1u)1=k1
(r1θ)1=rb1θe1(θ)
Σ1的第一类基本量为
E=(r1u)1·(r1u)1=1
F=(r1u)1·(r1θ)1=0
G=(rb1θ)2
Σ1的单位法矢量为
(n1)1=(r1u)1×(r1θ)1/D=rb1θg1(θ)/D
令n1由齿轮1齿的实体指向空域,D取负值,即

于是得到
(n1)1=-g1(θ) (3-2)
在σ1里(r1)1的二阶偏导数为(https://www.xing528.com)
(r1uu)1=0
(r1uθ)1=0
(r1θθ)1=rb1[e1(θ)+θg1(θ)]
Σ2的第二类基本量为
L=(n1)1·(r1uu)1=0
M=(n1)1·(r1uθ)1=0
N=(n1)1·(r1θθ)1=-rb1θ
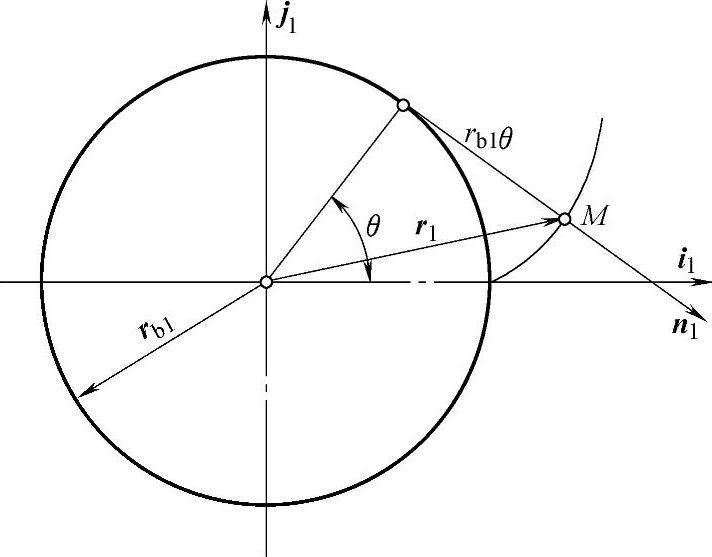
图3-3 渐开线起始点的位置
渐开柱面为可展直纹面,其参数曲线u方向和θ方向为主方向,其主曲率和短程挠率分别为

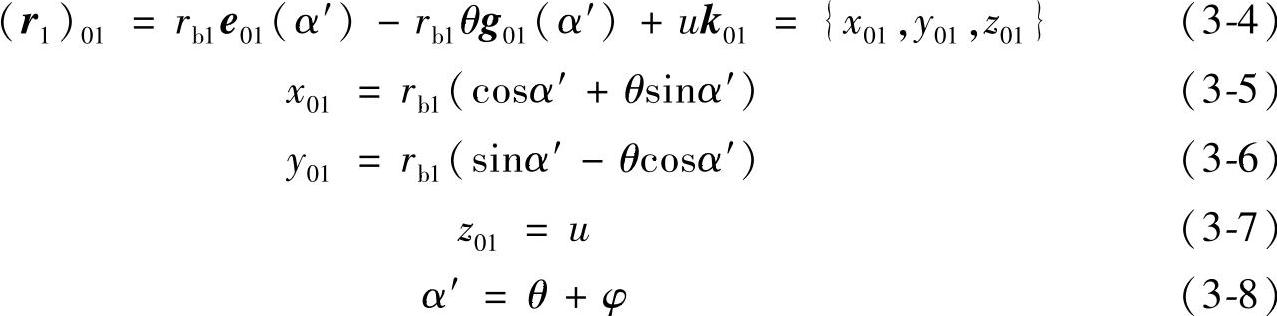
利用坐标变换单位矢量法(见附录B),将式(3-1)和式(3-2)进行σ1→σ01坐标变换,在σ01里得到曲面族{Σ1}01的方程为
单位法矢量为
(n1)01=-g01(α′) (3-9)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。