



ST3PR型星-三角起动控制器的外形图和电路原理图如图8-25所示。
ST3PR型星-三角起动控制器的工作原理:
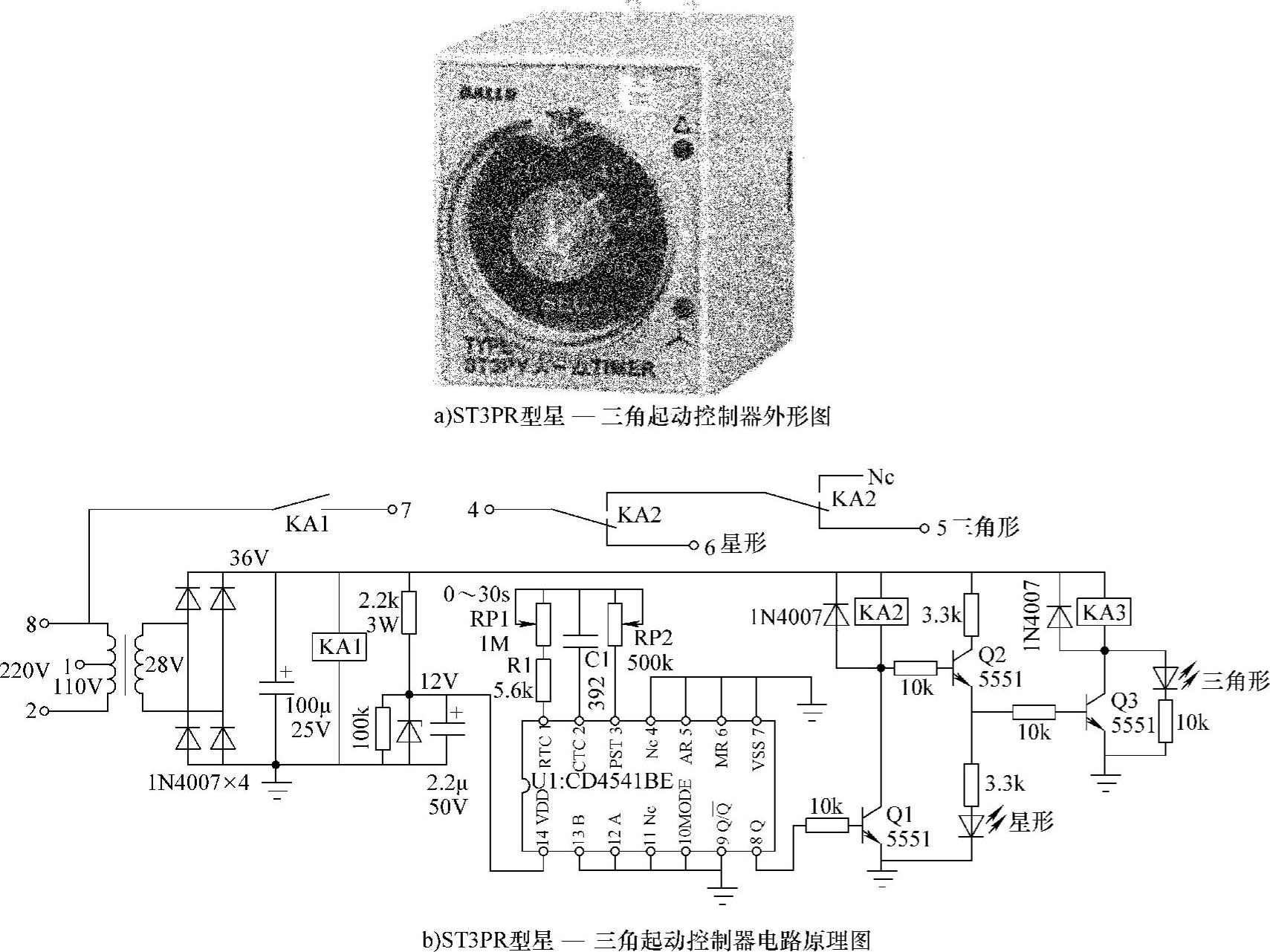
图8-25 ST3PR型星-三角起动控制器外形图和电路原理图
1.可编程定时器CD4051BE的引脚功能及定时原理
CD4541BE是采用CMOS工艺制造的可编程序定时集成电路。采用14脚双列直插式塑料封装形式,电源电压范围是3~18V,典型值为10V。其内部电路主要由振荡器、可编程16级二分频器、自动和手动复位电路、计数器、输出状态的逻辑控制电路等部分构成。
芯片的各脚功能和信号用途:1脚接振荡电阻RTC,2脚接振荡电容CTC,3脚接保护电阻RS,共同构成振荡器外接阻容网络端。当1、2脚外接元件值确定之后,即决定了振荡器的振荡频率,振荡频率f=1/(2.3·RTC·CTC)。5脚(AR端)是自动复位端,该脚为低电平时,电路在通电时会自动复位,使计数器清零。6脚(MR端)是手动复位端,该脚为高电平时,电路复位。8脚(Q端)是输出端。9脚是输出选择端,用来选择Q端在电路初始状态是高电平还是低电平,当9脚接低电平时,8脚的初始状态是低电平。10脚(MODE端)是单定时/循环输出方式选择端,当M=0时是选择单定时输出方式,所谓单定时方式是指电路定时时间到后,输出端Q的电平跳变后始终保持不变。直到下一次复位信号的到来;当M=1时是选择循环输出方式,循环方式是指Q端电平将按设定的时间作周期性跳变。12、13脚(A、B端)是分频器编程输入端,当A=B=1,电路可获得最大的定时时间。表8-2为A、B端的电平状态与分频系数的关系表。
本例电路,CD4051BE在电路中作为定时控制,因为无需太长的起动时间,故将A、B端(12、13脚)直接接地。调节电位器RP1,可将起动(星-三角转换延时)时间整定在0~30s以内。(https://www.xing528.com)
表8-2 A、B端的电平状态与分频系数的关系表

2.ST3PR型星-三角起动控制器的工作过程
装置上电后,由220V/28V电源变压器二次侧输出的AC 28V,经整流滤波获得DC 36V的继电器工作电源,再由简单12V稳压电路,取得12V稳压供电,作为DC4541BE的工作电源。继电器KA1得电动作,主电路交流接触器KM1先行闭合(见图8-26主电路)。
由于可编程序定时器芯片的9脚(Q输出选择端)接地,8脚(Q端)输出为低电平,晶体管Q1截止,Q2、Q3导通,继电器KA1的常闭触点接通主电路KM2,主电路进入星形联结减压起动阶段;由RP1、C1定时元件决定的延时时间到后,CD4541BE的8脚变为高电平,晶体管Q1导通,Q2、Q3截止,继电器KA1动作,常闭触点断开,接触器KM2掉电释放。同时继电器KA3失电,其常闭触点接通主电路KM3的线圈供电回路,主电路进入三角形联结全压运行阶段。
本装置电源的通、断与主电路控制回路的得电是同步进行的,控制电路的连接较为复杂;同时,星、三角切换控制采用继电器的常闭触点进行控制,器件故障时,存在上电时可能直接进入全压起动的缺点。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。