



图6-1 为U/f控制原理说明示意图
1.U/f控制模式
由上所述,变频器是变频又变压的电源设备,用改变输出电源的频率/电压来实现对电动机的调速。如果仅仅着眼于改变电流频率对电动机调速,由于频率改变时电动机内部阻抗也改变,会引起高速时励磁不足造成转矩不足,和低速时由于过励磁造成的磁饱和现象,使电动机的功率因数、运行效率显著下降。
U/f控制即是这样一种最基本的控制方式:改变频率的同时控制其输出电压,使电动机在大范围的调速运行区内,磁通量能保持于一个稳定不变的水平上,电动机的效率和功率因数并不因转速改变而降低。对于异步电动机的变频起动,为了避免电动机磁饱和和限制起动电流,在改变频率的同时必须同步改变输出电压(维持两者的固定比例),将电动机的转差率维持在5%以内的范围内。
从负载特性分类,一般可分为恒转矩负载(电动机的轴输出功率与转速成正比/线性比例,如卷扬机、传送带等)、递减转矩负载(电动机的轴输出功率是转速的二次方,如风机、水泵等)和恒功率负载(电动机输出的轴功率与转速成反比,如卷纸机等)三大类,额定负载下,前两类适宜在恒转矩区和节能区以内(额定转速以内)运行,因超速运行会导致过载,只有轻载时,才可以在额定频率以上运行。
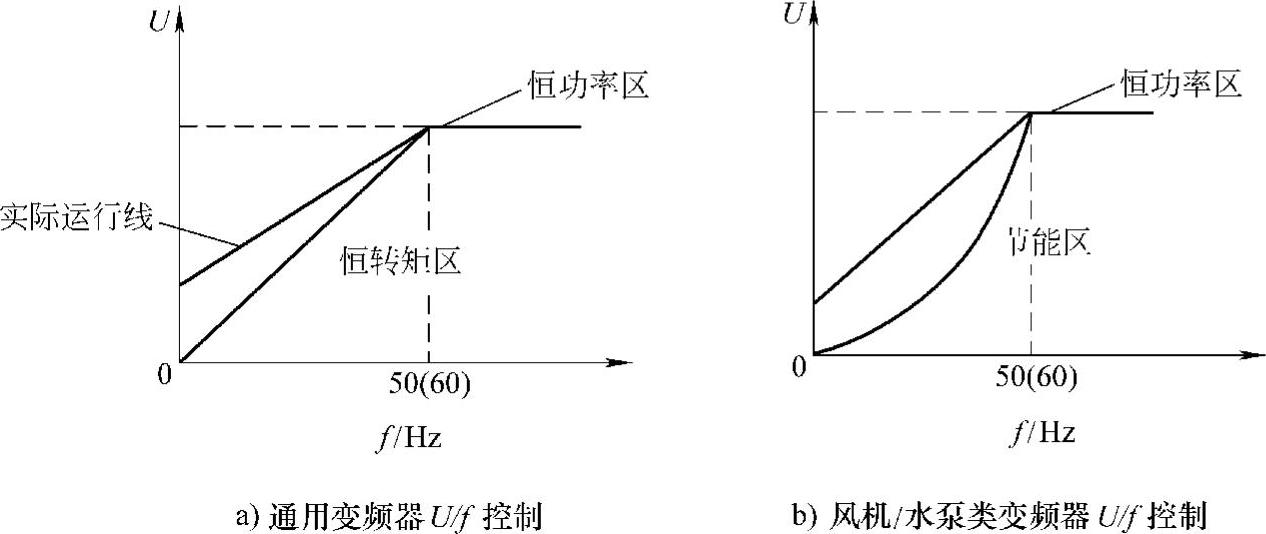
图6-1为U/f控制原理说明示意图,图6-1a在额定频率(50/60Hz)以下运行,保持U/f恒定,称为恒转矩区;图6-1b中,U与f的二次方成正比,在额定频率以上运行时,保持输出电压不变,由于电动机输入阻抗随频率上升而增大,输出转矩减小,是恒功率区。考虑到电动机低速运行时在内部电阻上造成的压降,实际运行时,变频器有低速时的转矩提升功能。(https://www.xing528.com)
2.矢量控制模式
简单的U/f控制,因为机械特性的非线性和动态转矩能力、静态调速性能并不理想,若进一步提高其控制性能,即必须采用矢量控制模式。
矢量控制模式的控制思想是将异步电动机在三相坐标系下的定子电流通过三相/二相变换,等效成两相静止坐标系下的交流电流,再通过按转子磁场定向旋转变换,等效成同步旋转坐标系下的直流电流,即相当于直流电动机的励磁电流和与转矩成正比的电枢电流,然后模仿直流电动机的控制方法,求得直流电动机的控制量,经过相应的坐标反变换,实现对异步电动机的控制。
其实质是将交流电动机等效为直流电动机,分别对速度、磁场两个分量进行独立控制。通过控制转子磁链,然后分解定子电流而获得转矩和磁场两个分量,经坐标转换,实现正交或解耦控制。
另外,尚有直接转矩控制方式、矩矩变频控制等较新的设计思路,但因技术上的瓶颈难于突破或电路较为复杂不易实现等原因,尚未有成熟产品问世。目前,U/f控制和矢量控制,是应用最广和相对已经成熟的控制技术。一般变频器均具有这两种控制功能,并且可通过参数设置,切换其控制方式。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。