



1.主电路和控制电源电路(见图5-26)
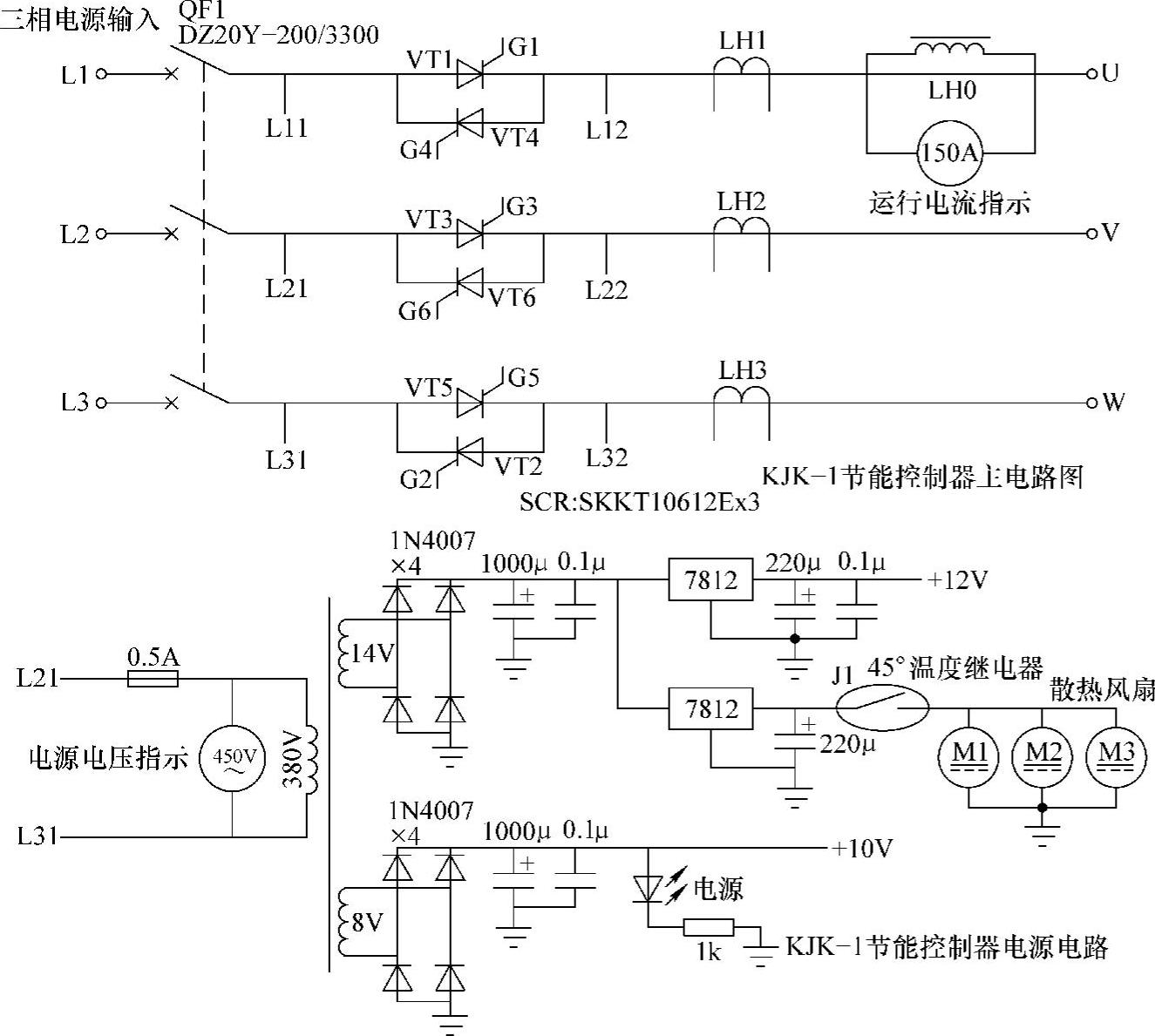
图5-26 KJK-1型晶闸管节电控制装置的主电路和控制电源电路
主电路由空气断路器引入三相电源,负载发生严重短路时,空气断路器跳闸,能起到短路保护作用(见图5-27)。电流互感器LH0与150A指针式电流表构成回路,用作运行电流指示。LH1、LH2、LH3取出三相运行电流信号,送后级保护电路,以取得过载、短路、断相等故障保护信号送MCU(微控制器)。
控制电源输出的两路经LM7812稳压得到的12V电源,一路串接温度继电器J1的常开触点,供3只散热风机的用电,当装置内部温度上升至45℃以上时,J1触点闭合,散热风机得电,为晶闸管模块进行强制风冷,环境温度降到40℃以下时,风机停止运行。这一控制模式,使散热风机的使用寿命得以延长;一路12V稳压电源,作为后级保护电路IC元件的供电电源。
控制电源输出的一路10V非稳压电源,作为起/停、自动/手动控制电源,10V电压又经LM7805稳压IC稳压成+5V电压,作为MCU的供电电源(见图5-28)。

图5-27 KJK-1型晶闸管节电控制装置的保护电路
2.断相、过载、短路信号形成电路
电流互感器LH1~LH3为厂家自行制作的“非标”产品,感应电流信号经820Ω1W电阻转变为交流电压信号(如运行电流100A时得到30V电压信号),经整流滤波后,分为多路电流检测信号送入后级电路。
[断相故障检测与信号记忆电路]三路电流检测信号分别输入由两级异或门构成的断相检测电路,异或门的运算逻辑是:当两输入端信号相同时,输出为低电平,两输入端信号相异时,输出为高电平。处于停机状态时,三相电流信号都为零,两级异或门的输入信号皆为低电平。或起动及运行中三相电流信号都有,并且其不平衡度在一定范围内,两级异或门电路的输入信号皆为高电平时,A1a、A1b两电路的输入信号均相同,输出低电平(正常)信号;当某相发生故障(如电源断相、电动机某相绕组断路等)时,两级异或门电路总有其中一组的两输入端产生信号相异,输出高电平(断相故障)信号,两异或门电路输出端的二极管为隔离二极管,使两个输出回路互不影响。断相检测电路的输出的高电平故障信号,输入至后级由两级反相驱动器构成的“故障信号锁定电路”或“故障信号记忆电路”,其输出信号控制晶体管Q1,进而点亮“断相”发光二极管指示灯,用作断相故障指示。异或门输入端,并联有3只12V稳压管,用于钳制起动期间电流互感器送入的高电压信号,保护异或门电路的安全。
CD4070内部两级反相驱动器接成正反馈放大电路,又可以称为“晶闸管效应”电路。正常运行时,第一级驱动器输入端信号为低电平,经两级反相输出,仍为低电平。断相故障发生时,由断相检测电路输入的高电平信号经两级反相输出高电平故障信号,同时输出的高电平信号又经正反馈回路,馈回输入端,将输入端“钳定”为高电平,进而使输出端维持高电平故障信号输出,并不因故障发生时,装置停机后电流检测信号的消失(断相故障信号也消失),而使断相故障信号也消失掉。两级反相驱动电路,一经高电平信号“触发”,即能保持高电平信号输出,因正反馈电路的“晶闸管效应”起到了故障记忆作用。这样工作人员现场巡检时,装置虽已处于停机状态下,但可以从故障指示灯的状态得知停机保护原因,利于检查和维修。要想对故障指示进行复位,将装置的电源断开,再重合,使A2a的14脚所接电容器上电荷放电完毕,电路失去“自保持效应”,就解除了“故障锁定”状态。
[短路故障检测与信号记忆电路]短路与过载保护,并不必区分故障是发生在哪一相电路,任一相发生短路故障都应该发生保护动作。故将三相电流检测信号由3只隔离二极管汇合成一路电流检测信号,经200kΩ半可调电阻整定后,送入短路故障检测电路。该控制线路通用性较好,适应22~95kW交流电动机,当电动机功率不同时,其短路电流保护值也不相同,故由200kΩ半可调电阻据所拖动电动机功率进行短路电流动作值的整定。整定的电流检测信号经9V稳压管输入后级故障信号记忆电路,在正常运行或轻过载状态(过载电流在电动机额定电流的6倍以下)时,检测信号的幅值低于9V,停机保护与否取决于过载保护电路的动作。当电动机电流大于额定电流的6倍以上时,电流检测信号高于9V,稳压管反向击穿,后级故障信号记忆电路被触发,“短路”发光二极管点亮,指示停机故障原因。过载保护有一个反时限特性,而短路保护处于危急状态下,不经延时处理,短路信号产生时,装置应该即时停机。本电路的短路保护动作时间,在0.01s以内。
[过载故障检测与信号记忆电路]也是为适应不同功率电动机的要求,电流检测信号经10kΩ半可调电位器“粗调”后,再由过载整定/挡位(一刀七掷)开关,据现场所接负载电动机的功率不同,调整适宜的挡位与之对应,如开关的“刀”与左一“掷”相连接时,则装置可连接22kW的负载电动机,与左二“掷”相连接时,则装置可连接30kW的负载电动机。所接电动机不同,电流检测信号的幅度不同,经过挡位开关切换(分压比切换),使不同功率级别电动机的电流检测信号,送入过载保护电路的信号幅度都是相同的。
经过过载整定/挡位开关切换后的电流信号,一路送入由A1d异或门电路,该级电路的两个输入端,其中之一接+12V高电平,正常电流检测信号幅度远远低于12V(在8V以下),两输入信号相异,使输出为高电平,“跟踪”发光二极管点亮。所谓跟踪是对设备运行状态的跟踪,设备处于正常运行状态下,有正常的运行电流产生,此指示灯点亮。
经过过载整定/档位开关切换后的电流信号,另一路送入A1c异或门电路,该异或门电路的另一输入端接地(电平),一般数字电路的输入信号幅度,≤1/3电源电压,认为是低电平,≥2/3电源电压认为是高电平,输出状态的翻转即是依此两个比较电平值进行的。12V供电电源下,当输入电流检测信号幅度大于8.4V时,A1c异或门电路判断两输入端信号相异,8脚为低电平,9脚变为高电平,输出端翻转为高电平信号。因而该电路可等效为一个基准电压为8.4V的电压比较器电路,当输入信号幅度(电流检测信号)高于基准电压时,输出状态翻转,输出过载保护信号。
A1c的输入电路,由200kΩ电阻和100μF电容组成过载延时(反时限)控制电路,当电流超过额定电流1.1倍时,装置应能正常运行而不停机,以后随过载系数增大,电容充电速度加快,保护动作时间变短。200kΩ电阻上并联的二极管在装置停电时提供100μF电容电荷的泄放通路,以保证装置上电或起动后反时限保护功能的生效。A1c过载保护电路输出的电流过载信号也经后级故障信号记忆电路,驱动“过载”发光二极管,给出过载故障指示。
断相、短路、过载等故障信号经二极管“或门电路”驱动晶体管Q4,将故障信号送入MCU的28脚(复位信号),用于中断六路移相触发信号的输出(将微控制器复位),起到故障发生时停机保护的作用。
3.MCU控制电路(见图5-28)(https://www.xing528.com)
[装置起、停与超温保护电路]KJK-1型晶闸管节电控制装置的运行与停止是通过控制MCU的+5V电源的通、断来实施的,其运行操作还设有自动、手动两种控制模式。当选择开关处于手动位置时,操作起动和停止按钮,可对稳压IC LM7808的输入电源进行通、断控制。按下起动按钮时,单向晶闸管2P4M形成触发电流回路而导通并维持导通,MCU芯片得到+5V电源。同时MCU的24、25、26引脚经K1接入“0”电平,MCU判断是手动控制状态;按下停止按钮时,晶闸管2P4M的电流通路被断开而自行关断,松开停止按钮后,2P4M仍在关断状态,MCU失去+5V电源,装置停止工作。K1开关打到“自动”位置时,MCU的供电电源为K1直接连通,MCU根据24、25、26引脚由K1和K3挡位位置所决定的逻辑电平值,判断为自动控制状态,并按K3所设置的延时起动时间进行延时起动。
图5-28电路中还包含了温度保护电路,通过对MCU的+5V电源的通、断控制,起到模块超温时的停机保护。J2为75℃的温度继电器,用于检测晶闸管模块的运行温度。正常工作时,晶体管Q5饱和导通,Q6的偏置电压因Q5的导通被短路到地,处于截止状态,“模块过热”故障指示灯不亮。当模块温度超过75℃,J2常闭触点断开,切断了MCU的+5V工作供电,同时晶体管Q5失去工作偏压而截止,Q6得到工作偏压而导通,“模块过热”故障指示灯点亮,装置处于停止状态。
[自动起动延时时间和起动速率调整电路]挡位开关K3、K4用于自动起动延时时间和起动速率调节。自动延时起动时间共分为0~50s六个挡位,K3为1刀6掷的三组联动开关,延时时间的长短,取决于K3开关的调整位置,形成了MCU的24、25、26引脚的3位数字输入信号,如当三引脚组合信号为“000”时,自动延时起动时间为0s;三引脚组合数字位信号为“111”时,自动延时起动时间为50s。起动速率是指对软起动电压斜坡曲线进行调节,挡位加大时,斜坡曲线变缓,由起动起始电压至全压的时间加长。K4的调节方式与K3相同,是改变MCU的16、17、18引脚的数字“位”信号,实施对起动速度的调整。在这里,MCU处理的输入信号不再是模拟电压,而是数字信号,这也是单片机电路的一个特点。

图5-28 KJK-1型晶闸管节电控制装置的MCU电路与同步/触发电路
[MCU的基本电路]单片机MC68705P3CS的1、3脚为供电脚,引入+5V工作电源。4、5脚为外接晶振引脚,与内部电路一起构成振荡电路,形成系统运行的基准时钟信号。28脚为复位控制端,低电平复位有效。4.7kΩ电阻和0.47μF电容组成上电复位电路,装置上电时由RC延时作用在28脚形成一个低电平复位信号,单片机进入待机状态。从前级故障保护电路来的控制信号也进入28脚,故障发生时,28脚电位被强制拉为“0”电平,单片机停止工作,系统处于故障保护状态。以上电路形成了MCU工作的基本(三要素)条件,任一条件不被满足,MCU即处于“罢工”状态。
[同步信号电路、电流信号电路和移相触冲电路]为便于原理分析,将A相同步电路重绘于下(见图5-29)。
同步信号电路:电网同步电压采样是在反向并联晶闸管的两端引入的,并非直接取自三相输入电源,当输出端空置不能形成负载回路时,同步电压信号也不能形成,电路的特点是,先接入三相负载,电压采样电路才能工作。晶闸管VT1同步信号是在其并联晶闸管VT4进入截止状态(电流为零)后才形成的,称为电流过零同步信号,与电压过零同步信号的采集点和采集方式有所不同。
当晶闸管VT4处于电流过零截止后,L11电源端为正、L31电源端为负时,经L11→R7→U1输入侧发光二极管→L12端,形成正半波Uac(VT4)电流过零点同步信号;当晶闸管VT1处于电流过零截止后,L11电源端为负,L12端经负载回路引入电压为正时,经L12→U2输入侧发光二极管→R7→L11端,形成负半波Uca(VT1)电流过零点同步信号。在一个周期当中,在U1、U2输出端形成正半波、负半波两个低电平电流过零点同步信号,送入MCU的8脚。另两路电流过零点信号,也由两只光耦合器取出,分别送入MCU的9、10脚。用于移相触发脉冲形成的过零点基准参考。

图5-29 同步信号、功率因数角检测电路
(试分析)电流采样电阻R1、R2、R3也并接于L11、L12端子上,从R2、R3之间取出电流相位信号,经D3、D4正反向钳位(负电压钳位于0电平,正电压钳位于+5V)后,输入MCU的11脚。另外,同R1、R2降压和C2、C1分压取出L11电源电压相位信号,送入MCU的2脚,2、11脚信号在MCU内部进行相位比较,得到功率因数角信号,用于对输出移相脉冲输出时刻的控制。同时,2、11脚两种信号相比较,能判断VT1、VT4的导通状态,异常时由MCU做出控制调整动作或实施停机保护。
触发电路:MCU参考输入同步信号,由软件手段生成移相脉冲,由MCU的12、13、14三个引脚输出,经功率放大电路进行功率放大后,驱动脉冲变压器,触发晶闸管,实施交流调压控制。这里脉冲输出脚用了3个,脉冲变压器也用了3只,脉冲信号处理有以下特点:
1)每个MCU脉冲输出引脚一个周期内输出4个(两个双脉冲)移相脉冲信号,如14脚输出A+、A-两个同一相正、负半波触发信号,和由另二相触发电路来的B-、C+两个补脉冲信号。
2)脉冲变压器采用1只,但含有两个同相位输出绕组,分别触发主电路中的VT1、VT2单向晶闸管,当A+触冲脉冲作用时,VT1承受正向电压而导通,VT2虽同时有触发脉冲加到栅-射极上,但因承受反向电压而关断,VT1、VT2两管的端电压相位差为180°,完全不必担心两只晶闸管会同时导通。
这样处理的好处,MCU省去了3个脉冲输出脚,外电路省掉了3只脉冲变压器。
3)移相触发脉冲为优化调制波,由软件生成,并不增加硬件电路的复杂程度。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。