



为了更好地理解功率因数和电压调节双闭环PI控制的原理,图5-21以原理框图的形式将双闭环控制模式清晰地表现出来,请参考图5-21、图5-22进行分析。
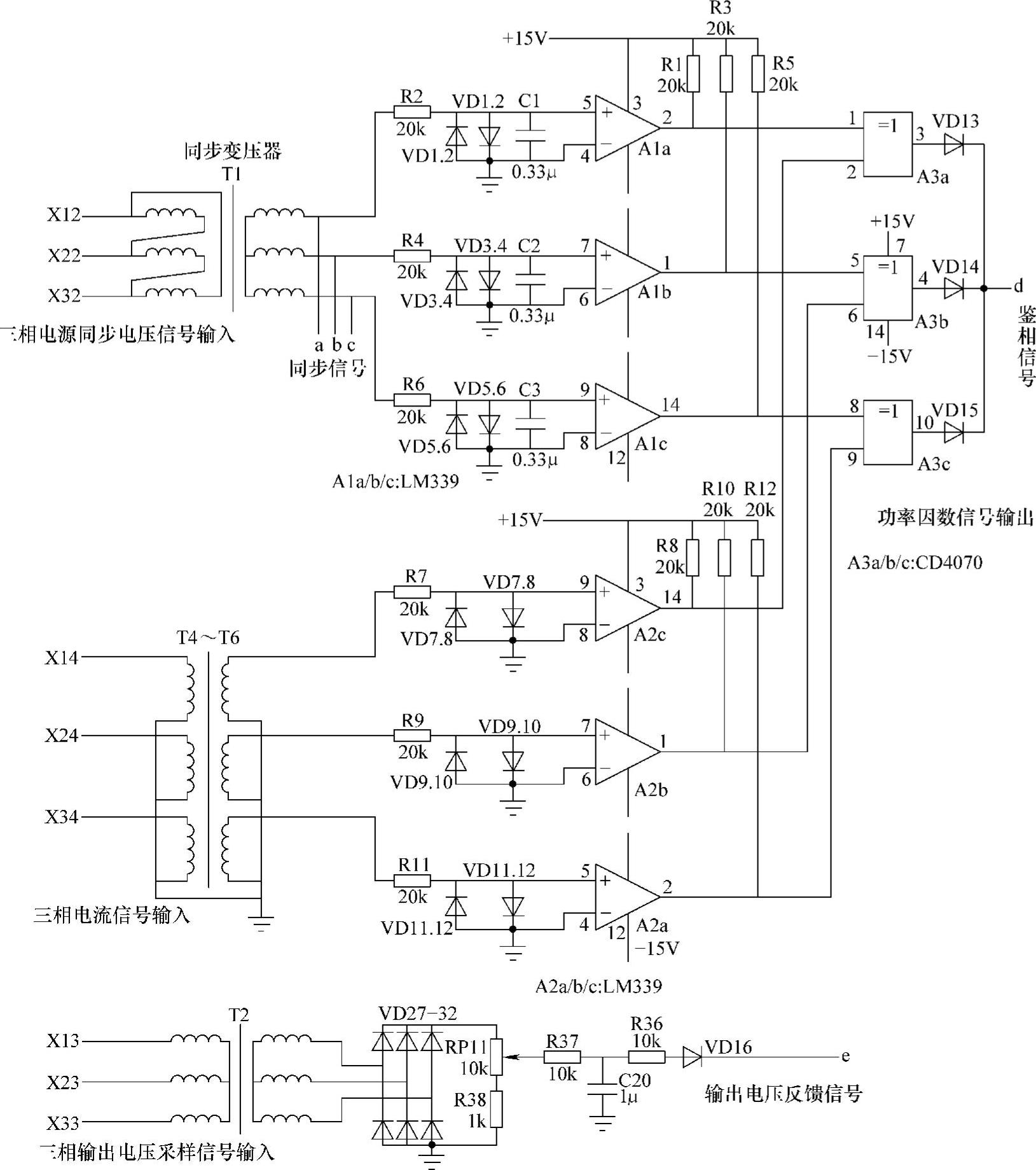
图5-20 功率因数信号形成(鉴相)电路和输出电压反馈信号电路
DJK3电动机节电器的双闭环控制流程简述:
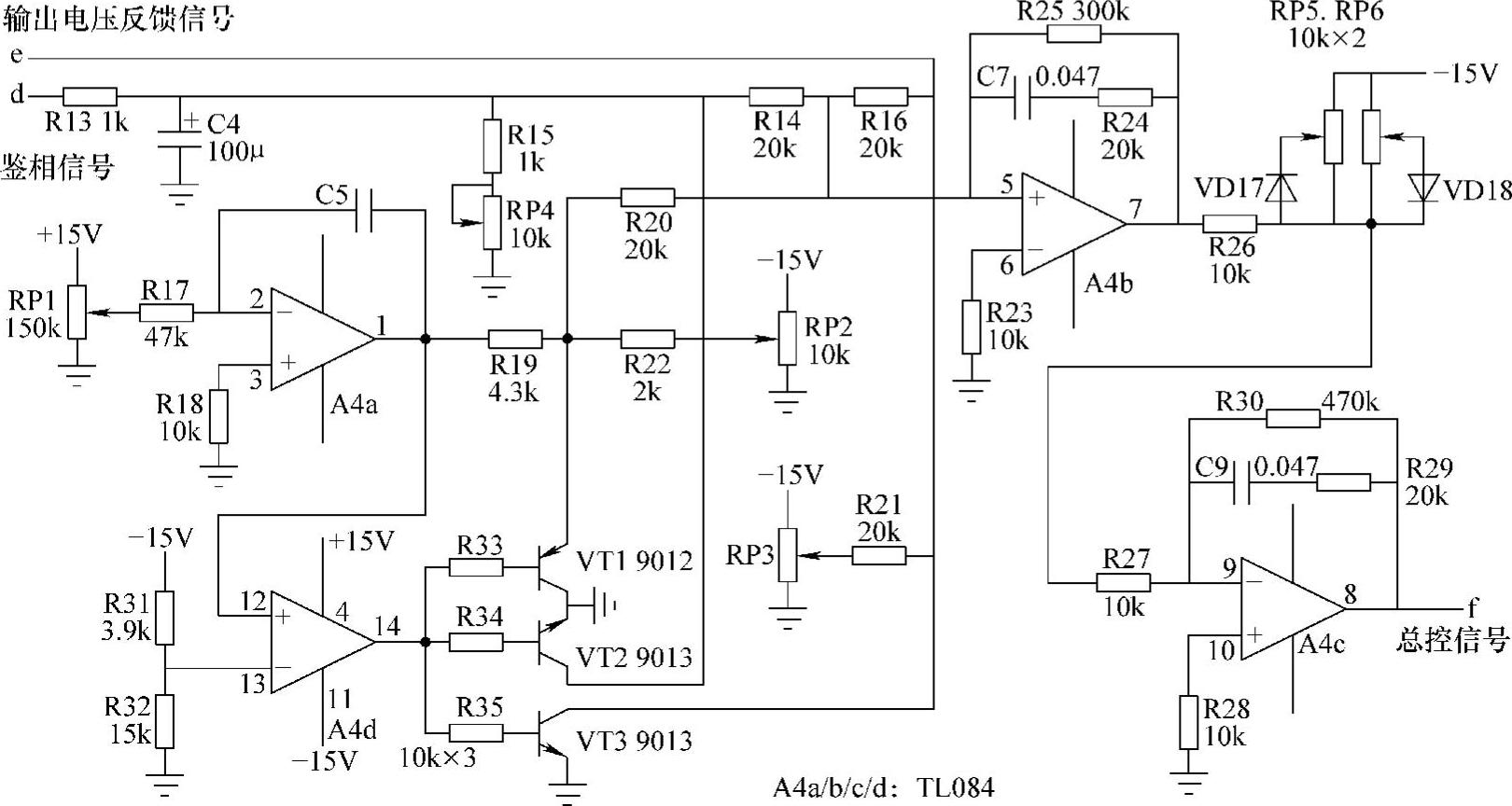
运放电路A4a接成积分放大器,为软起动控制电路,调整半可变电阻RP1和RP2可使软起动时间和起动电压为所需数值(不同容量和不同负载的电动机起动时间和起动起始电压有所不同)。在(上电)起动期间,运放电路A4a的输出脚1脚(积分输出)产生15V~0的电压变化,当此电压值大于0V时,运放电路A4d因同相端电压高于反相端负压,14脚输出为正的高电平,晶体管VT1反偏截止,VT2、VT3正偏导通。A4a输出的软起动信号经R19、R20输入至电压调节器A4b的同相输入端5脚;VT2正偏导通,将鉴相电路输入的功率因数调节信号短路到地,VT3导通,将输出电压反馈信号短路到地,此时输出电压调节器的控制信号只有软起动信号生效。VT1、VT2、VT3三只晶体管起到三只联动开关的作用,对输入至电压调节器的信号进行了切换,VT1等效为图5-22中的S1-1,VT2等效为图5-22中的S1-2,VT3等效为图5-22中的S1-3。起动过程结束后,A4a的输出脚电压由0~-15V变化,使A4d同相端电压低于反相端负分压值,A4d输出脚电压变为负电平,此时VT1、VT2、VT3三只“联动开关”再次动作,VT1正偏导通,VT2、VT3反偏截止,软起动控制信号因VT1短接被“截断”,而鉴相器输出的功率因数信号和输出电压反馈信号,汇合后输入电压调节器A4b的同相输入端,整个系统便在给定值和两路反馈信号作用下,使电动机端电路跟随负载变化自动调整输出,电动机在较高的功率因数值和效率下运行。
 (https://www.xing528.com)
(https://www.xing528.com)
图5-21 功率因数和电压调节双闭环PI控制电路
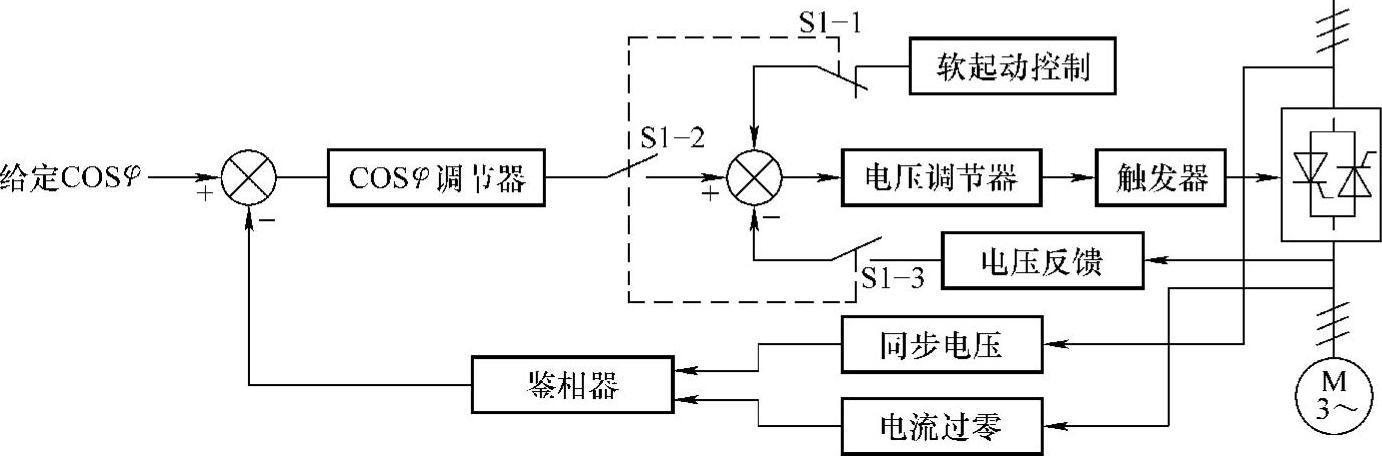
图5-22 功率因数和电压调节双闭环原理方框图
半可变电阻RP3、RP4用于调整功率因数反馈比例和电压反馈比例(同时也形成了给定值调节),使输出电压跟随负载变化而变化,并且在整定范围内变化,输出电压降低时输出电流能同步降低或维持原值不变,避免电压降幅过大引起电流上升产生过载、堵转等现象。
A4b、A4c两级运放电路组成了电压调节器,两级电路同时又为积分放大器(I调节电路),与前级电路配合构成了功率因数、电压的双闭环PI电路。半可变电阻RP5、RP6为输出电压上、下限幅调整电位器,用于整定A4c输出控制信号的范围,以适应后级移相触发电路输入控制信号的电压范围要求。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。