



(参见图3-11)
GJBK-2电动机星-三角节能保护控制器整机电路与GJBK-1整机电路的结构大致相同,尤其是断相、过载/短路故障信号检测电路的前级电路,与GJBK-1型控制器都是相同的,在这里只将不同的电路摘录出来,简述一下电路的工作原理。
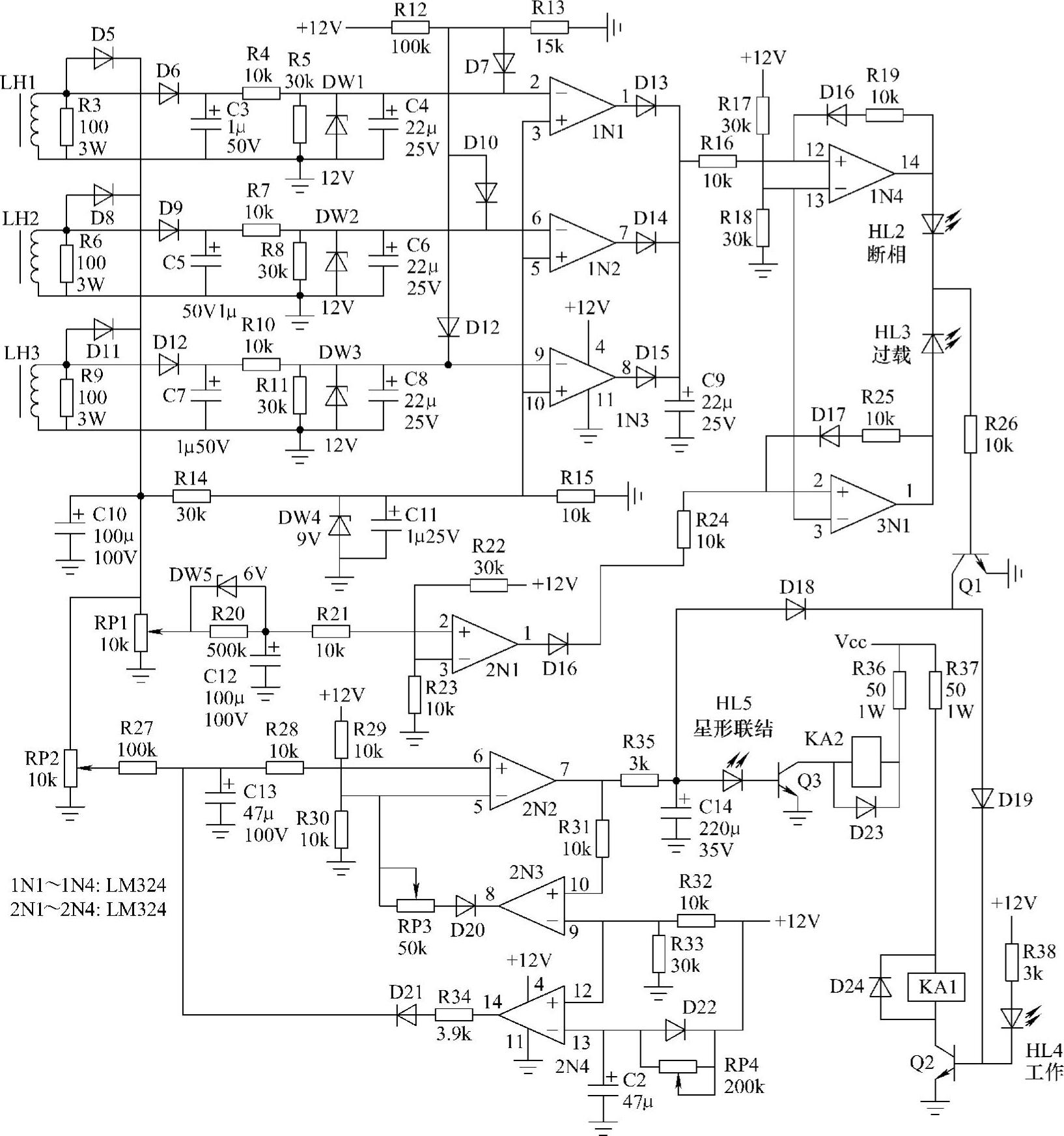
图3-11 GJBK-2电动机星-三角节能保护控制器整机电路
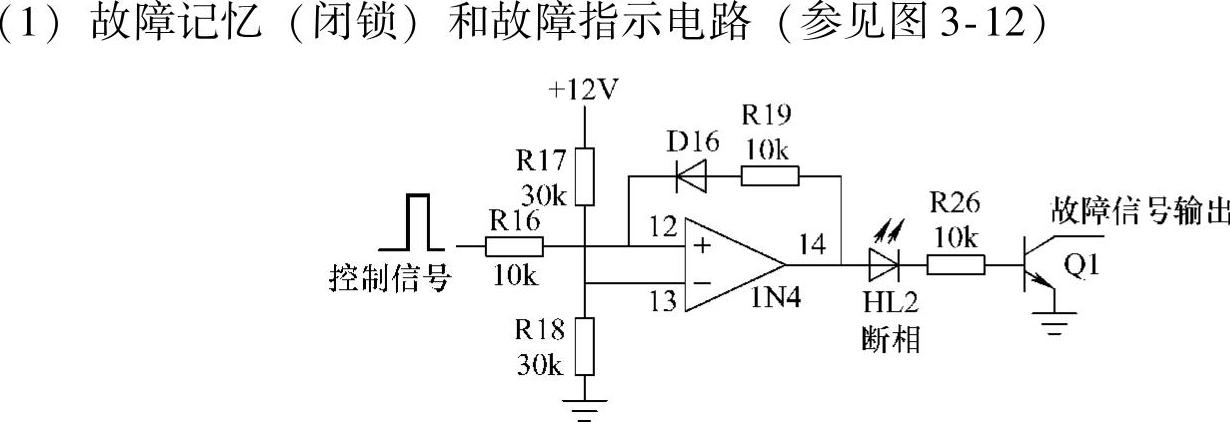
图3-12 故障记忆(闭锁)和故障指示电路
由运放电路1N4、指示灯HL2等元件组成断相故障记忆与指示电路,1N4与外接电阻、二极管一起组成“变形迟滞电压比较器电路”的电路形式,从电路效能来看,构成了“晶闸管效应电路”。当断相故障发生时(1s内已经停机保护),相当于在1N4的输入端12脚输入了一个高电平的脉冲信号。1N4的反相输入端是经R17、R18对+12V分压取得的6V基准(比较)电压,由此可提高该级电路的噪声干扰容限水平,使6V以下的干扰信号不起作用,提高电路工作稳定性。输入故障信号生效时,使1N4输出端14脚变为高电平,断相指示灯HL2点亮,故障动作开关管Q1导通,输出停机保护信号。
同时,1N4的正反馈支路R19、D16将输出高电平信号反馈回同相输入端,使同相输入端在故障信号消失后,仍能维持在高电平信号电压上,1N4输出端的高电平状态能够“保持”,故障指示灯HL2持续点亮,起到接受故障信号触发后自锁,记忆故障信号的作用。这和晶闸管元件受触发后即使触发信号消失,仍能自行维持导通的道理是一样的。故障停机后,为操作人员判断停机故障原因提供了方便。同时因Q1的持续导通,将后级电路驱动动作继电器晶体管的基极偏压“钳制为零”起到故障闭锁作用。在故障报警期间,使输入起动信号无效,避免在故障状态下重新开机,造成更大的损失。若需消除故障闭锁状态,要按下停止按钮SB1,断掉控制电路的电源,进行故障复位。
(2)星-三角切换控制电路(见图3-13)
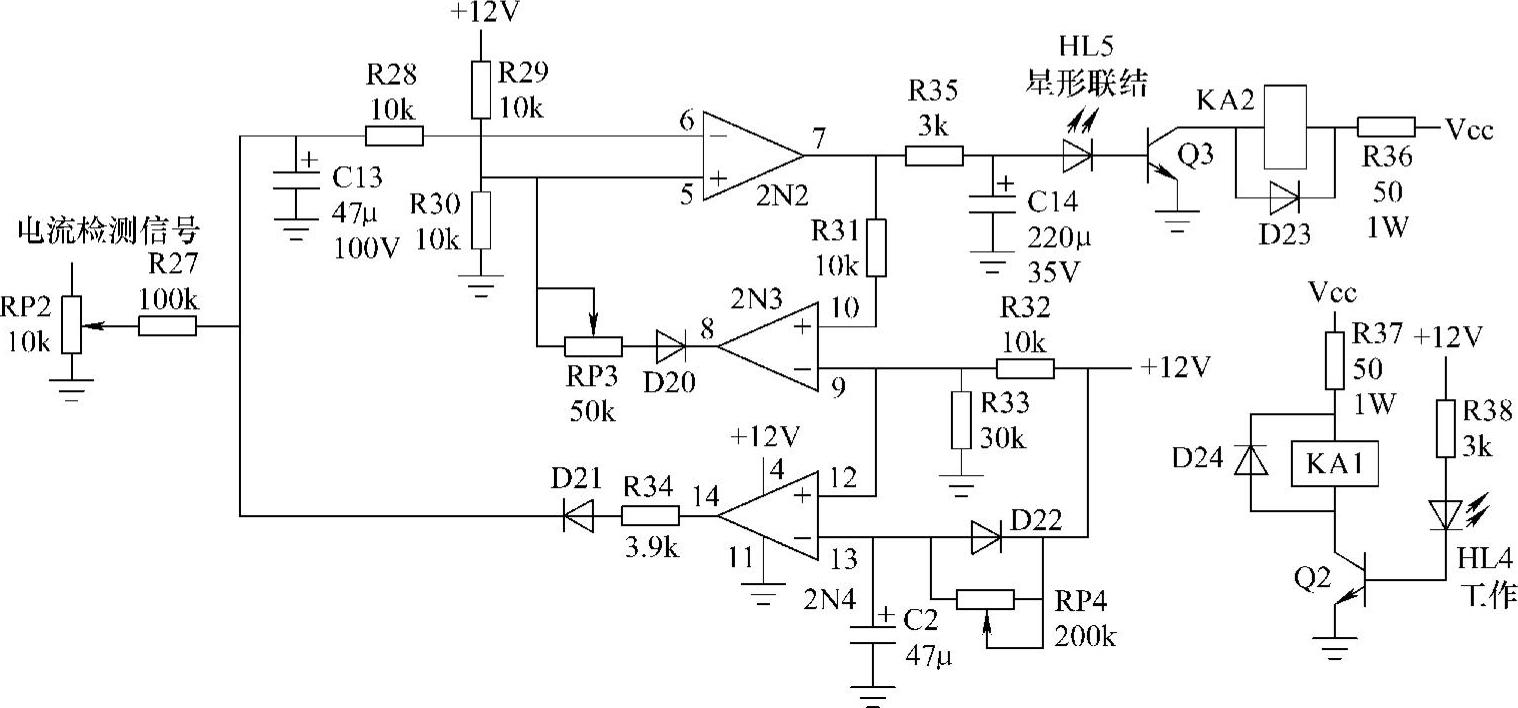
图3-13 星-三角切换控制电路(https://www.xing528.com)
本例星-三角切换控制电路,为了适应三角形起动、星形运行的控制要求,与图3-7电路有较大的不同。装置上电以后,操作起动按钮后,控制继电器KA1由R38、工作指示灯HL4提供基极偏流,先行动作,其常开触点为主电路交流接触器KM1的线圈提供工作电源(参见图3-10主电路),主电路具备运行的电源条件。
此时,电压比较器2N4反相输入端13脚的电压因积分电路作用在缓慢上升中,同相输入端12脚引入的是电阻R32、R33对+12V的分压值,2N4同相输入端电压值高于反相输入端电压值,输出端14脚变为高电平,二极管D21正偏导通,这路“人为形成的高幅度电流检测信号”加到电压比较器2N2的反相输入端6脚,使输出端7在电动机起动过程中一直为低电平,继电器KA2无得电条件,其常闭触点接通主电路KM3线圈的供电回路,KM3处于闭合状态,主电路进入全压(三角形联结)起动过程。
调整电位器RP4可以调整起动时间。当2N4的13脚上升至9V以上(超过同相输入端分压值)时,2N4的输出端14脚变为低电平,意味着起动过程结束,进入运行阶段。此时二极管D21反偏截止,“人为形成的高幅度电流检测信号”消失,代之以从前级电路电流互感器、整流滤波电路来的“电流检测信号”,星-三角切换控制电路,即开始根据电流检测信号的大小,进入到星-三角自动切换的控制过程中。此时可能存在两种情况:
1)负载较重,运行电流较大,电压比较器2N26脚输入的电流检测信号电压高于5脚分压值,输出端7脚仍保持低电平,晶体管Q3处于截止状态,继电器KA2仍无得电动作条件,装置的主电路持续三角形联结全压运行模式。
此时,因2N2的输出端一直为低电平,电压比较器2N3同相输入端的电压低于反相输入端,2N3的8脚为低电平,二极管D20正偏导通,形成经半可调电位器RP3、D20、2N3的8脚内部输出电路到电源地的对2N2的5脚电压的分流电路,因而调整RP3,可以调整2N3同相输入端的基准(比较)电压值,决定着三角形-星形的动作阈值。RP3可称为三角形转星形动作点设置电位器。
此时2N3的5脚电压值的大小,由R29、R30分压电路和RP3、D20、2N3的分流电路共同决定,是三角形转星形的动作设置阈值,可由RP3来整定。
2)电动机的起动过程顺利结束后,运行电流大幅度下降,电流检测信号也成线性比例降低,至2N2的6脚输入信号电压低于5脚分压值时,2N2的输出端7脚变为高电平,星形联结指示灯HL5点亮,晶体管Q3导通,继电器KA2得电,主电路交流接触器KM3换电,KM2得电,控制电动机绕组由三角形联结切换星形联结——减压节能运行状态。
同时,电压比较器2N3的10脚电压高于9脚,输出端8脚变为高电平,二极管D20反偏截止,“经半可调电位器RP3、D20、2N3的8脚内部输出电路到电源地的对2N2的5脚电压的分流电路”被“截断”,此时电压比较器2N25脚的基准(比较)电压,仅取决于R29、R30对+12V的分压值,电压值有所升高,“演变”为星形转三角形的动作设置阈值。调整电位器RP2,使电动机三角形联结时运行电流达到额定电流的80%时,其中心活动臂输压的信号电压值等于或略高于R29、R30的分压值,即完成了星形转三角形的控制设置。
这样一来,根据电动机三角形联结、星形联结运行状态的不同,在2N2的5脚自动了形成两个不同基准(比较)电压值,输入电流检测信号即自动与这两个基准(比较)电压值相比较,控制继电器KA2的得电和失电,完成星形-三角形和三角形-星形的自动切换控制。
注意,实际调整步骤,是先使电路进入星形联结控制状态,送入模拟的电流信号,调整RP1,整定星形-三角形转换动作的电压阈值;再使电路进入三角形联结控制状态,送入模拟的电流信号,调整RP3,整定三角形-星形转换的电压阈值。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。