



GJBK-1型电动机星-三角节能保护控制器是将普通电动机保护器的功能进行了拓展,使之具有故障保护和自动节能运行控制的双重功能,其电路结构主要分为两大块:故障检测和停机保护电路、星-三角自动切换节能运行控制电路。
[电动机起、停控制电路]对电动机的起、停操作控制,其实是通过对稳压12V电源的通、断来实施的,按下起动按钮SB2后,晶闸管VT1得到触发电流而导通并自行保持导通状态,集成稳压器7812输出+12V工作电压给控制电路,控制电路根据电流检测信号的大小,输出星-三角切换控制命令,使主电路进行自动节能运行;当操作停止按钮SB1时,晶闸管因流通电流小于其维修电流而自行关断,控制电路的+12V工作电源被切断,主电路电动机处于停止状态。两只按钮控制装置(负载电动机)的运行与停机。
[星-三角自动运行控制电路]参见图3-6的下半部分电路。集成运算放大器2N1~2N4、晶体管Q5、Q1、Q2、Q3,继电器KA1、KA2、KA3等元件组成星-三角自动运行控制电路。
1)操作起动按钮SB1使控制电路得电后,Q1由+12V经电阻提供基极偏压,最先导通,KA1动作(请参照图3-5控制电路),主电路接触器KM1得电闭合,提供电动机的三相电源,此后在运行过程中,KM1一直是闭合的。
2)星-三角运行状态的切换控制是通过检测运行电流信号来实现的。将星-三角切换控制电路单独摘出,如图3-7所示。由LH1~LH3等3只电流互感器来的运行电流检测信号,分别经D5、D8、D11二极管整流、电容C10滤波成直流信号电压,先送入电流范围整定电位器RP2(以适应后级电路信号电压范围的要求),RR2中心活动臂输出的电压信号,其信号电压值反映电动机运行电流的大小,经后级电路进一步处理,作为星形-三角形或三角形-星形切换控制的依据。
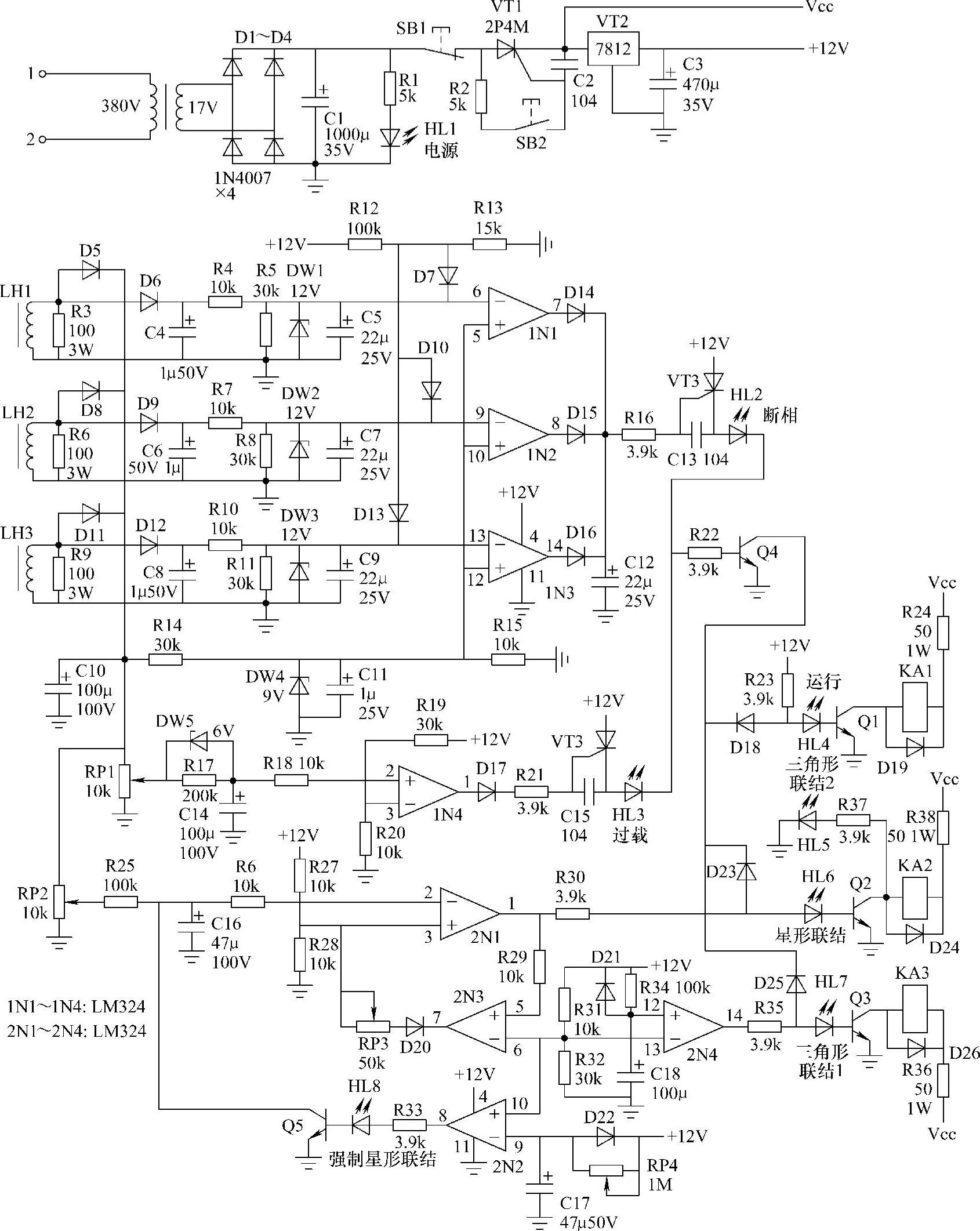
图3-6 GJBK-1型电动机星-三角节能保护控制器整机电路
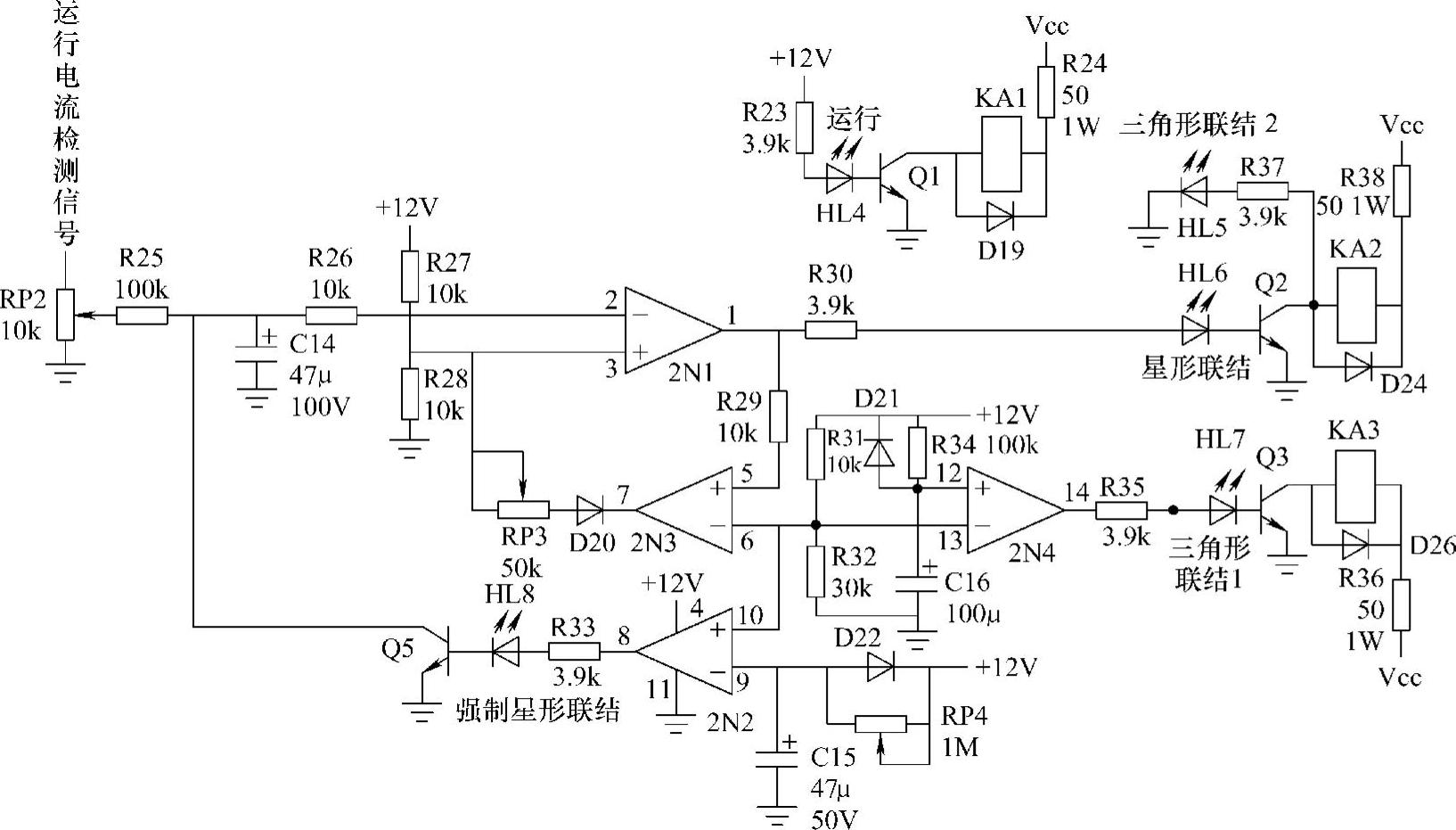
图3-7 GJBK-1型电动机星-三角节能保护控制器的星-三角切换控制电路
电压比较器2N4,同相输入端接有R34、C16积分延时电路,反相端输入端引入R31、R32对+12V分压得到的9V电压。控制器上电期间,2N4同相端电压因C16充电缓慢上升,2N4输出端14脚保持为一个时间阶段的低电平,继电器KA3无得电条件,使主电路“三角形联结控制”接触器KM3在上电期间不具备得电条件。此时电流检测信号尚未形成,电压比较器2N1同相输入端3脚由电阻R27、R28对+12的分压值高于信号检测电压值,2N1输出端1脚变为高电平,经R30、HL6控制晶体管Q2处于导通状态,进而驱动继电器KA2动作,接通主电路“星形联结控制”接触器KM2,保障装置在上电(起动)期间期确定使主电路进入减压起动过程。同时HL6指示灯点亮,指示装置处于减压起动过程中。
3)电动机起动初始时刻,起动电流很快上升至超出电动机的额定电流值,为避免不必要的星-三角切换,保证减压起动过程的正常进行,由电压比较器2N2及RP4、C15等元件组成“强制星形联结”控制电路,2N2同相端经电源分压取得9V基准电压信号,而反相端接有RP4、C15可调积分延时电路,C15充电作用使反相端输入信号由0V缓慢上升,因而在起动期间,2N1输出高电平信号,晶体管Q5导通,将RP2中心臂输出的运行电流检测信号短接到地,临时强制“切断”了电流信号的传输通道,使2N1电压比较器的2脚为地电平,3脚为相对高电平,2N1为在起动期间保持高电平输出状态,继电器KA2(主电路接触器KM2)得电,电动机处于星形联结减压起动过程。电路的减压起动时间可由RP4进行整定。
4)电动机起动过程结束后,2N2反相输入端C15上充电电压高于同相端电压时,其输出端变为地电平,晶体管Q5截止,使检测到的运行电流信号通道“畅通无阻”地输入后级星-三角切换控制电路。RP2中心臂输出的电流检测信号输入到电压比较器2N1的反相输入端。此时,出现两种情况:(https://www.xing528.com)
①电压比较器2N1同相端为电阻R27和R28对+12V分压引入的6V基准(比较)电压。当运行电流较小,使输入电流信号电压小于6V时,2N1输出为高电平电压,控制继电器KA2持续得电,电动机绕组在起动过程结束,继续处于星形联结(减压节能)状态运行。同时2N1的输出的高电平信号,经R29引入电压比较器2N3的同相输入端5脚,电压比较器2N3的输出脚7脚输出高电平信号,二极管D20处于反偏截止状态,对2N1的同相端电压无影响,使6V基准电压形成由星形联结向三角形联结转换的“高门槛”基准。当星形联结状态运行电流增大到电动机的75%额定电流时,说明电动机的负载变重,已经不适合于星形联结减压运行,电压比较器2N1反相端输入电流检测信号电压大于6V,2N1输出状态反转,继电器KA2失电,KA2的常闭触点恢复闭合状态,辅助控制电路实施星形-三角形切换动作,主电路转换为三角形联结全压运行。
②电动机转换为三角形联结运行后,此时线电流等于1.732倍的相电流,运行(线)电流检测信号电压大幅度降低,若无相关措施,控制电路有可能会接着输出星-三角形联结转换信号,造成运行状态的频繁切换!所以由三角形联结向星形联结的转换基准点,随着星形-三角形切换动作之后,产生一个新的“低门槛”比较基准。2N1输出端变为低电平(主电路切换为三角形联结运行)后,电压比较器2N3同相端和输出端也随之变为低电平,二极管D20正偏导通,形成电位器RP3、D20、2N1内部放大器到地的电流通路,该电流通路并联在R28两端,形成对6V基准电压的进一步分压,使2N1同相端基准电压变为(比如4V)由三角形联结向星形联结转换的“低门槛”比较基准,一是避免了不必要的频繁切换,二是三角形联结运行时,应有适合三角形联结向星形联结切换的适宜切换点。电动机三角形联结运行后,当负载变轻,运行电流下降为额定电流的45%以下时,输入电流检测信号电压小于4V时,2N1输出状态反转,保护器输出控制信号,主电路由三角形联结运行转换到星形联结降压节能运行模式。
电路控制的关键是使2N1同相端的基准电压值随运行状态的切换进行同步切换,以形成新的比较基准。调整RP2,可调整星形联结向三角形联结的信号转换阈值,RP2为星形-三角形切换整定电位器;调整RP3,则可调整三角形联结向星形联结的信号转换阈值。RP3三角形-星形切换整定电位器。可以根据负载电动机的功率/电流值进行准确和适宜的设置。
[故障停机保护电路]故障停机保护电路由断相故障检测与信号输出电路、过电流故障检测与信号输出电路、短路故障检测与信号输出电路等三部分组成,如图3-8所示。
电动机的断相运行,可分为以下几种情况:
1)供电电源断相。在电动机起动前断相会造成起动困难或无法起动,起动声音异常,无保护时电机因堵转极易烧毁;在运行中断相,轻载时尚能维持运转,但运行电流严重不平衡,可能出现过电流运行;重载时易发生堵转、严重过载而损坏。
2)电动机绕组断路故障。因电动机绕组断路故障出现断相运行,运转无力,电动机振动大,故障现象同1)。
3)电动机电缆断路故障。故障现象同供电电源断相。
电子式电动机保护器的出现,为完善地实施电动机的过载、短路和断相保护提供了可能,一定程度上取代了热继电器,提升了控制功能和保护效果。本章内容的重点是对各种电子式电动机保护器电路的原理分析和故障维修指导,对电子式电动机保护器以下简称为电动机保护器。
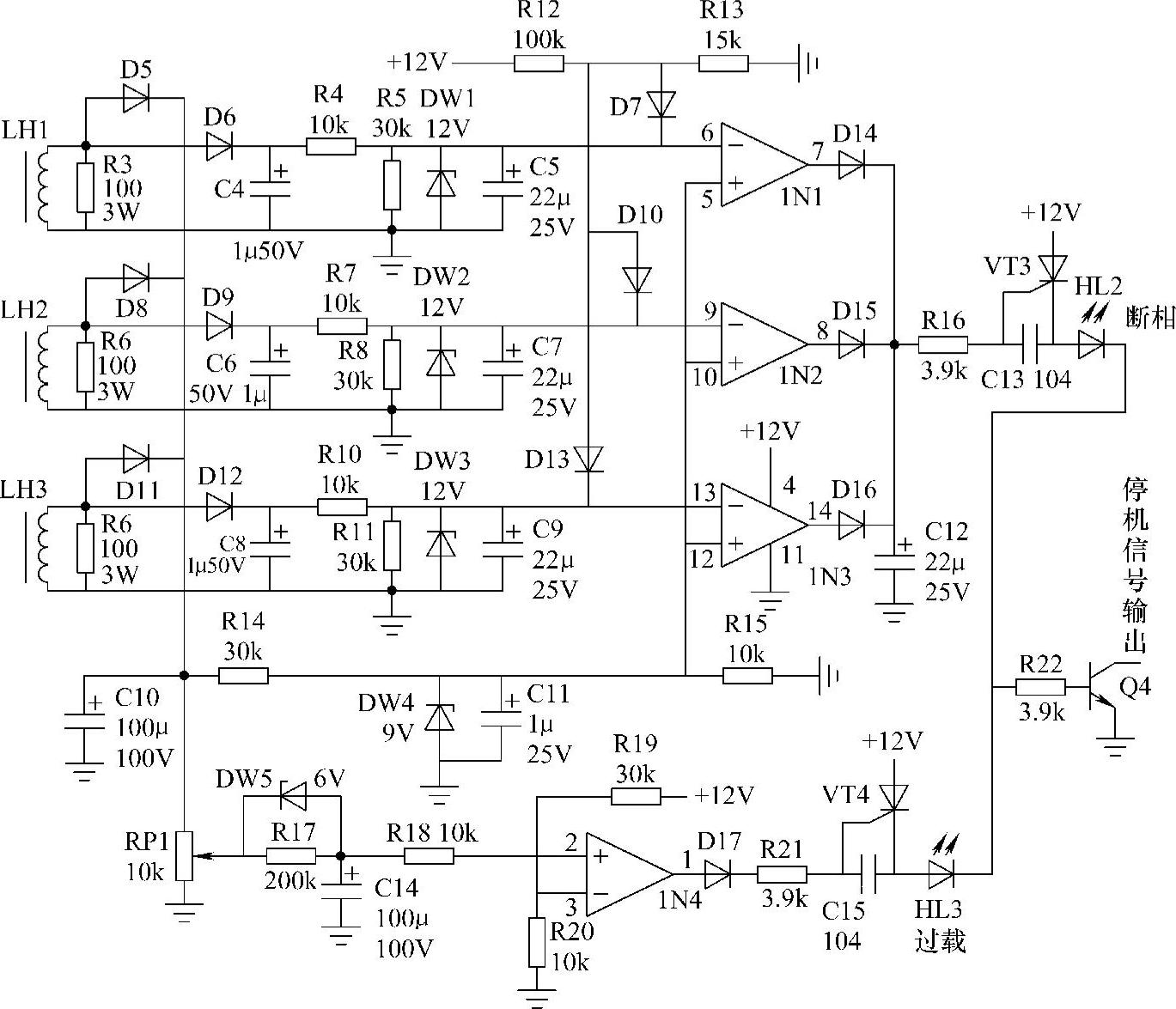
图3-8 GJBK-1型电动机星-三角节能保护控制器的故障停机保护电路
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。