



5.5.2.1 初始考虑
根据滑差电动机的特点,曾经提出三个方案:
方案1:滑差电动机的励磁电流保持为最大值,拖动电动机实行变频调速;
方案2:将滑差电动机的两个旋转部分连接到一起,拖动电动机实行变频调速;
方案3:用一台同容量的异步电动机代替电磁调速电动机,进行变频调速。
实践结果分述如下:
5.5.2.2 保持最大励磁电流
1.方案特点
把励磁电流保持在最大位置,然后对拖动电动机实施变频调速,如图5-31a所示。

图5-31 保持最大励磁电流的变频调速
a)方案特点 b)机械特性
2.实践效果
完全不能使用。
3.原因分析
当拖动电动机的工作频率下降时,滑差电动机的理想空载点下移,其机械特性如图5-31b中之曲线①、②、③、④所示。由于没有了转速反馈,机械特性得不到改善,所以不能用。
5.5.2.3 用同容量异步电动机取代(https://www.xing528.com)
1.方案特点
用一台同容量的异步电动机代替电磁调速电动机,进行变频调速,如图5-32a所示。
也可以从节约经费出发,把第二级的两个部分用机械的方法连接在一起,如图5-32b所示。
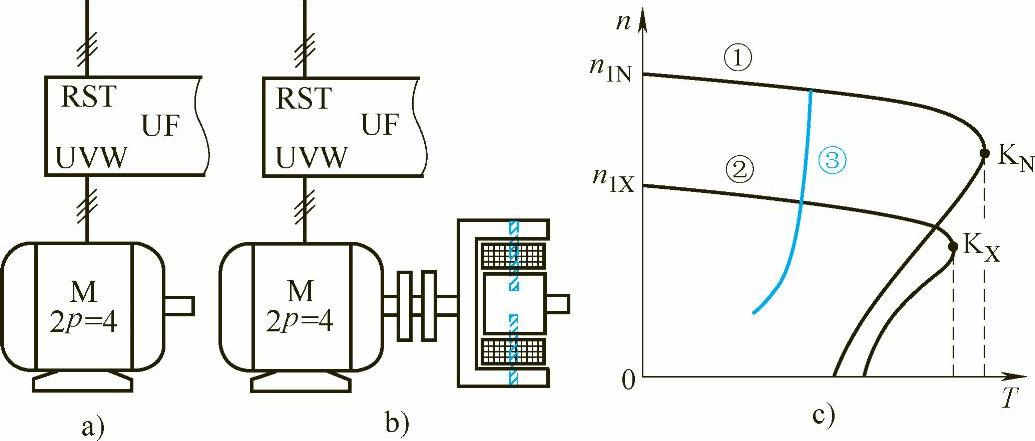
图5-32 直接用拖动电动机变频
a)用同容量电动机变频 b)第二级固定 c)机械特性
2.实践效果
基本可用。但在低速时的带负载能力不如滑差电动机。
3.原因分析
滑差电动机在加入了转速负反馈后,在额定励磁电流下,低速时的电磁转矩反而比高速时大。就是说,它在低速时的有效转矩,是可以大于额定转矩的。据有的产品介绍,在最低速时的有效转矩可达额定转矩的1.7倍。究其原因,则因为拖动电动机的功率不变,故在一定程度上具有恒功率的特点,即低速时转矩大。
而变频调速在调频过程中,其有效转矩是不可能超过额定转矩的。所以,电磁调速电动机低速时能带动的负载,变频调速却带不动。
4.解决办法
改用6极异步电动机,如图5-33a所示。在图5-33b中,曲线①是4极异步电动机变频后的有效转矩线。6极异步电动机的额定转矩约为4极电动机的1.5倍,其有效转矩线如图中之曲线②所示。曲线③是电磁调速电动机的有效转矩线。由图可知,采用了6极异步电动机后,在低速时的有效转矩大于电磁调速电动机的有效转矩,生产机械就能够在低速下运行了。

图5-33 改用6极电动机变频调速
a)改用6极电动机 b)机械特性比较
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。