



【摘要】:图4-21 电动机反接制动电路a)原主电路 b)改进后主电路2.离合器电路离合器用于控制负载侧的旋转方向。
4.5.1.1 原电路及存在问题
1.电动机电路
如图4-21a所示,接触器KM1用于电动机的起动和停机;KM2用于反接制动。电阻R用于限制反接时的电流大小。KS是速度继电器,用于当电动机从正转到反转的过程中,过零时切断电路。
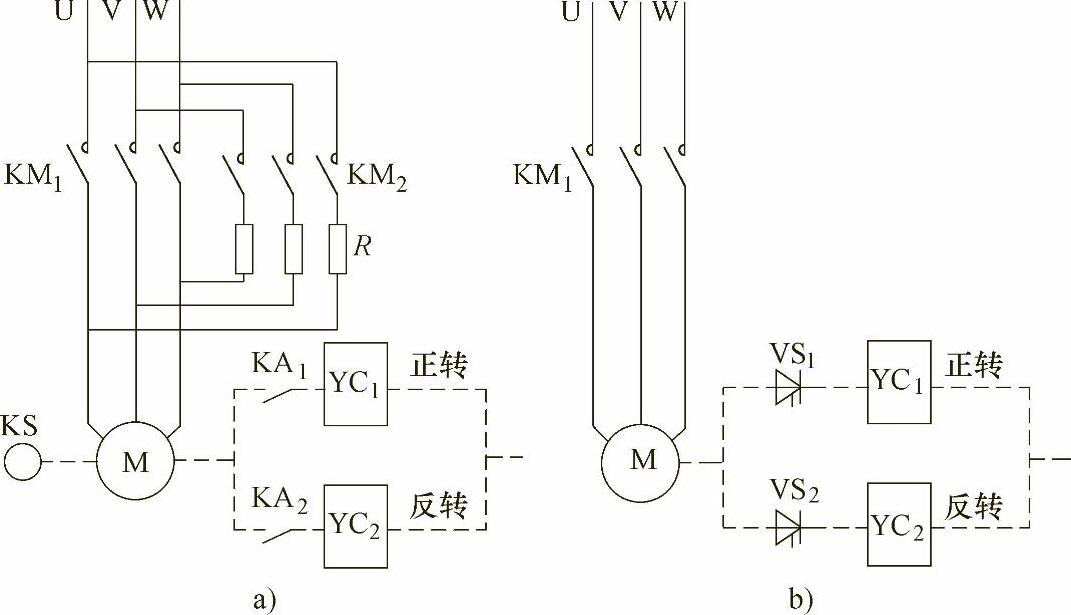
图4-21 电动机反接制动电路
a)原主电路 b)改进后主电路
2.离合器电路
离合器用于控制负载侧的旋转方向。YC1得电时,负载正转;YC2得电时,负载反转。YC1和YC2由继电器KA1和KA2控制。
3.存在问题
(1)故障率较高(https://www.xing528.com)
接触器KM2在接通时由于电流较大,触头容易损坏;又由于电磁离合器的绕组是大电感,继电器触点在断开时火花较大,故障率也较高。
(2)控制不够精准
速度继电器过零时的断开时刻,是通过调节弹簧的松紧度来调整的,常常并不精准,负载在停机时或继续正转几转,或反向转几转,准确停住的情况较少。
4.5.1.2 改进方案
1.主电路
取消反接制动电路和速度继电器,如图4-21b所示。
2.电磁离合器的控制
取消继电器KA1和KA2,改由晶闸管VS1和VS2来控制电磁离合器,如图4-21b所示。非但解决了继电器触点容易烧坏的问题,也便于实现离合器的反接制动。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。