



4.1.1.1 构造与机械特性
1.构造特点
力矩电动机,也称高转差率电动机,其构造和普通的笼型异步电动机完全相同,只是,其转子绕组是用高电阻材料构成的。
2.机械特性
绕线转子异步电动机在转子回路里串联电阻后,机械特性的特点是:临界转矩不变,临界转速下降,如图4-1a所示。
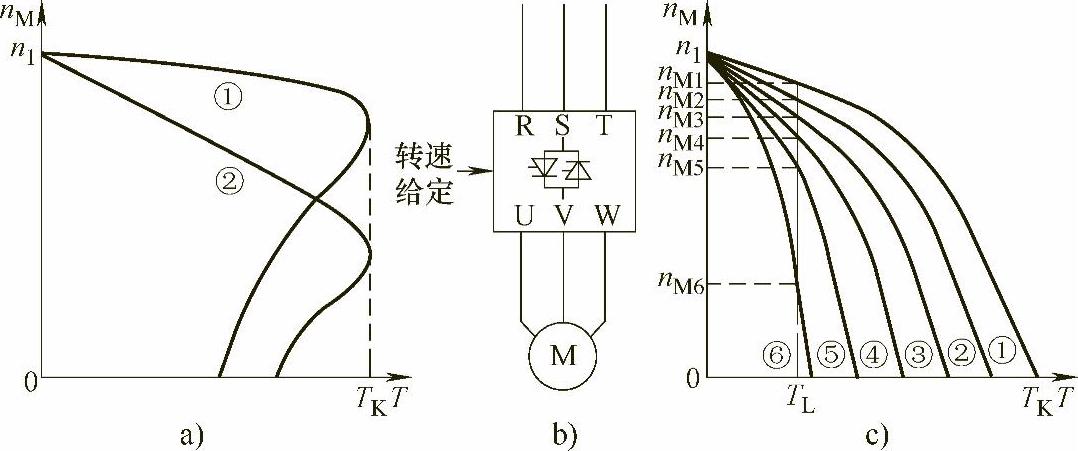
图4-1 力矩电动机的机械特性
a)转子串联电阻机械特性 b)力矩电动机 c)机械特性
力矩电动机在本质上和绕线转子异步电动机在转子回路里串联电阻是相同的,所以其机械特性的特点也类似,只是转子绕组的电阻值更大,临界点可移至横坐标以下,其自然机械特性如图4-1c中之曲线①所示。
4.1.2.2 力矩电动机的调速(https://www.xing528.com)
1.开环调速
如图4-1b所示,在负载转矩不变的前提下,电压越低,电动机的转差越大,转速越低。所以,调节三相电源的电压,就可以得到不同的转速,如图4-1c中之nM1、nM2、…、nM6所示。
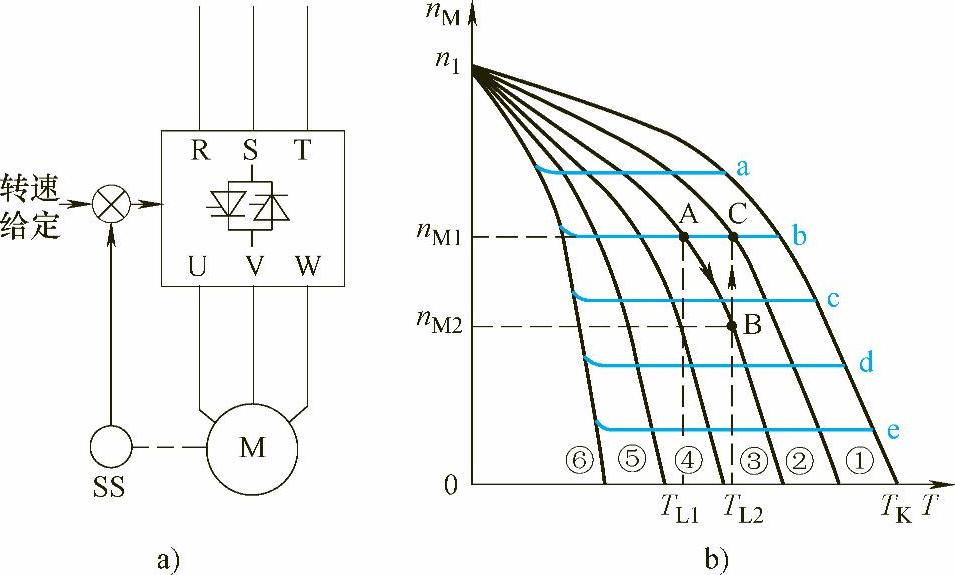
图4-2 力矩电动机的闭环调速
a)闭环控制示意图 b)闭环控制后的机械特性
由于电动机的临界转速很低,在降低电压的情况下,得到的机械特性如曲线②、③、④、⑤、⑥所示。很明显,这些机械特性都很软,负载转矩变化时,转速的变化很大,运行是不够稳定的。
2.闭环调速
实际使用时,都把控制电路连接成闭环控制系统,如图4-2a所示,图中,SS是速度传感器,用于将转速信号反馈到转速给定电路。举例说,负载转矩等于TL1时,工作点在曲线③上的A点,转速是nM1。当负载转矩增大为TL2时,工作点将下移至B点,转速降至nM2。这时,由于转速反馈的结果,使转速控制器的输出电压升高,电动机的机械特性变为曲线②,工作点跳转到曲线②的C点,转速又上升为nM1,可以看出,通过转速反馈,可以得到如曲线a、b、c、d、e那样的较硬的机械特性,从而扩展了它的用途。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。