



3.4.3.1 异步电动机的机械特性
1.机械特性的定义
机械特性是说明拖动系统工作情况的重要特性。电动机的机械特性是说明电动机产生的电磁转矩TM和转速nM之间的关系,它体现了电动机的带负载能力。电动机在没有人为地改变其参数时的机械特性,称为自然机械特性。
2.机械特性的实用表达式
作为电动机的使用者,要精确地进行计算是比较困难的。所以,在工程计算中,可以通过实用表达式来进行计算:

式中 TM———电动机的电磁转矩,N·m;
TK———电动机的临界转矩,也称为最大转矩,N·m;
s———转差率,其定义见式(3-16);
sK———临界转差率,是电动机产生临界转矩时的转差率。
3.机械特性的描绘
自然机械特性的形状如图3-31中的曲线①所示,主要决定于三个点的位置:
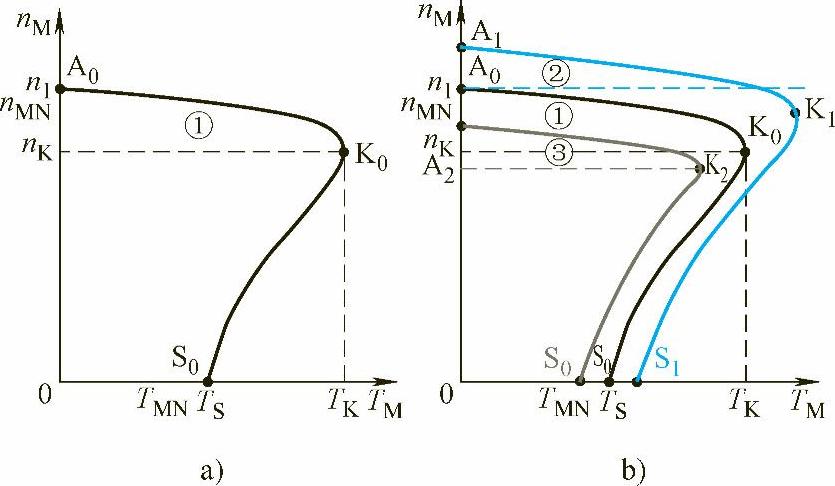
图3-31 电动机的机械特性
a)普通异步电动机 b)整流子电动机
(1)理想空载点
所谓理想空载,就是假设电动机在旋转过程中,一点阻力都没有。在这种情况下,转子的转速是可以达到同步转速的。所以,理想空载点的坐标是:
TM=0,nM=n1(s=0)
如图3-31a中之A0点。
(2)起动点
电动机刚接通电源,但转速仍为0(nM=0,s=1)时称为起动点S。这时的转矩称为起动转矩TS,也叫堵转转矩。S点的坐标是:
TM=TS,nM=0
如图3-31a中之S0点。
(3)临界点
临界点的坐标是:
TM=TK,nM=nK
如图中之K0点。
4.临界点的求出
(1)临界转矩
通过额定功率PMN和额定转速nMN,可以求出额定转矩:

又通过额定转矩TMN和过载能力kT可求出临界转矩:
TK=kTTMN (3-23)
式中 kT———电动机的过载能力。
(2)临界转差率
可通过下式求出:(https://www.xing528.com)

3.4.3.2 三相整流子电动机的机械特性
1.转矩的实用表达式
令 ε=EK/E2 (3-25)
式中 ε———附加系数;
EK———附加电动势,V;
E2———转子不动时的副方电动势,V。
则,三相交流整流子电动机的转矩的实用表达式为

2.同步转速
(1)EK与E2S同方向
n1′=n1(1+ε) (3-27)
式中 n1′———EK与E2S同方向时,二次绕组里加入EK后的同步转速,r/min。
(2)EK与E2S反方向
n2′=n1(1-ε) (3-28)
式中 n2′———EK与E2S反方向时,二次绕组里加入EK后的同步转速,r/min。
式(3-28)说明,当EK与F2S反方向时,其理想空载转速将低于旋转磁场的转速,如图3-31b中的A2点。
式(3-28)说明,当EK与E2S同方向时,其理想空载转速将高于旋转磁场的转速,如图3-31b中的A1点。
3.起动转矩
TS=TS0(1±ε) (3-29)
式中 TS0———未加EK时的起动转矩,N·m。
当EK与E2S同方向时,取“+”号;EK与E2S反方向时,取“-”号。可见,三相交流整流子电动机的起动转矩是随附加电动势而变的,如图3-31b中的S1和S2所示。
4.三相交流整流子电动机的临界点
(1)临界转差率
计算公式是

式中 sKX———三相交流整流子电动机的临界转差率;
sK0———未加EK时的临界转差率。
式(3-30)中,恒有
所以,不论ε是“+”还是“-”,ε越大,sKE和sK0之间的差也越大。
(2)临界转矩

式(3-31)说明,当EK与E2S同方向,ε为“+”时,TKX/TK0>1,TKX>TK0,机械特性如图3-31b中之曲线②所示;而当EK与E2S反方向,ε为“-”时,TKX/TK0<1,TKX<TK0机械特性如图3-31b中之曲线③所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。