



3.4.1.1 对三相交流异步电动机的回顾
1.异步电动机的旋转原理
在三相交流异步电动机里,当在定子(一次侧)的三相绕组里通入三相交变电流时,它们的合成磁场是旋转磁场,转速是n1,转子(二次侧)的短路绕组将反方向切割磁力线而产生感应电动势和感应电流,感应电流又和磁场相互作用,产生电磁力F和电磁转矩TM,使二次侧以转速nM旋转,旋转方向与磁场旋转方向相同,如图3-25a所示。
2.几个重要的关系式
(1)旋转磁场的转速(同步转速)
n1=60f1/p (3-15)
式中 n1———同步转速,r/min;
f1———定子电流的频率,Hz;
p———磁极对数。
(2)转差率
s=Δn/n1=(n1-nM)/n1 (3-16)
式中 s———转差率;
Δn———转差,r/min;
nM———转子的转速,r/min。
(3)二次电流的频率
f2S=p·Δn/60=sf1 (3-17)
式中 f2S———二次电流的频率,Hz。
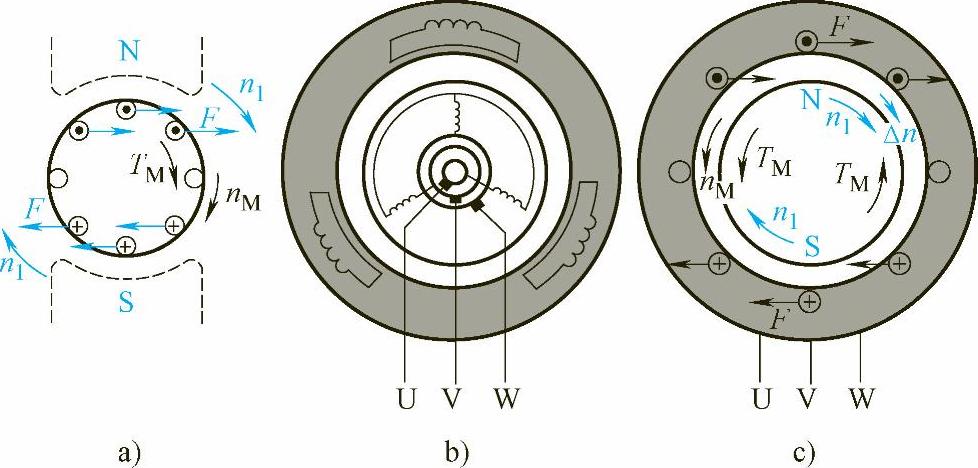
图3-25 三相整流子电动机的构思
a)异步电动机 b)一、二次侧换位 c)换位后的运行
3.4.1.2 一次侧和二次侧换位后的异步电动机
1.调节方案的设想
如果能够在二次回路里加入一个可调的附加电动势EK,则二次电流和电磁转矩,以及电动机转速,也都可以得到调节。条件是,附加电动势EK的频率也必须和二次电流的频率f2S相等。
2.双方绕组换位的思考
由于笼型异步电动机的二次绕组是笼条,无法向二次绕组里加入附加电动势,如果将双方的位置交换,将一次侧的三相绕组安置在转子上,三相交变电源通过三个电刷和集电环通入到三相绕组中去,而把二次侧的短路绕组安置在定子上,如图3-25b所示。
在这种情况下,这台电动机将如何运行呢?
当三相交变电流通入转子上的三相绕组时,所产生的旋转磁场,相对于转子的转速是n1。并且,不管转子本身是否旋转,转速多高,旋转磁场相对于转子的转速永远是n1。
旋转磁场在空间旋转时,将被定子的短路绕组切割,产生感应电动势和感应电流。通有感应电流的定子绕组,和旋转磁场相互作用,又要产生电磁力F和电磁转矩TM。但由于定子是不能旋转的,转子便得到了一个方向相反的电磁转矩,使转子旋转起来,旋转的方向和旋转磁场的旋转方向相反,转速为nM,如图3-25c所示。
一方面,磁场以转速n1围绕着转子旋转,另一方面,转子本身又以转速nM反方向旋转,显然,旋转磁场在空间的转速应该是这两个速度之差:
Δn=n1-nM (3-18)
3.4.1.3 虚拟的直流发电机
1.直流发电机结构特点(https://www.xing528.com)
直流发电机的定子是磁极,转子是电枢绕组。当转子由原动机带动旋转时,电枢绕组将切割定子磁场而产生感应电动势。因为电枢绕组是交替地在N极下和S极下切割磁通,所以感应电动势也是交变的。如转子每分钟旋转n转,则电动势交变n次,即交变电动势的频率是:
f=n/60 (3-19)
处在N极下元件的感应电动势的方向和处在S极下元件的感应电动势的方向相反。每一磁极下的一组元件串联成一个支路,如图3-26中之AXB支路和AYB支路。又将两个支路并联起来,由换向器和电刷引出。在电刷A、B间就得到合成的直流电动势,极性为A“+”、B“-”,如图3-26a所示。这时,每条支路内所有元件内的电动势方向都相同,合成电动势最大。
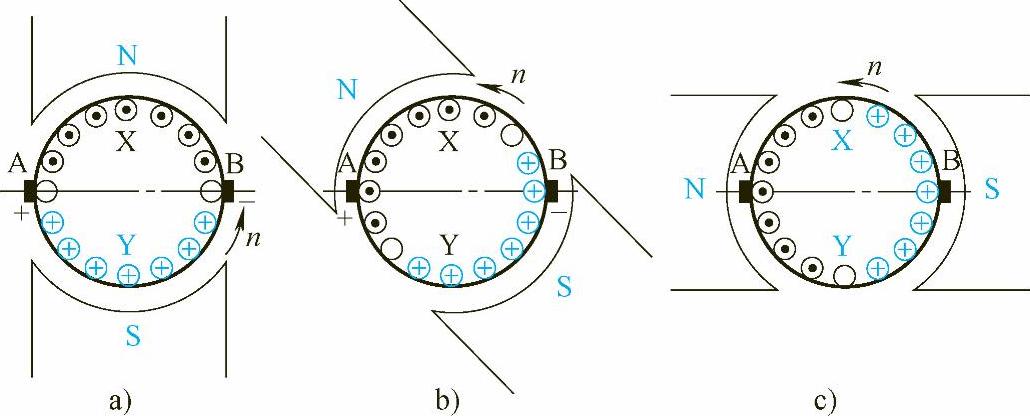
图3-26 直流发电机的磁场旋转
a)正常情况 b)磁极旋转45° c)磁极旋转90°
2.磁场旋转的结果
(1)磁极旋转45°
今将磁极逆时针方向旋转45°。这时,每个磁极下各元件中电动势的方向是不变的。由于电刷位置不变,故每条支路内串联的元件也不变。如图3-26b所示,这时,每条支路内,都有部分电动势的方向是相反的,A、B间的合成电动势就减小了。
(2)磁极旋转90°
今将磁极逆时针方向再旋转45°,每个磁极下各元件中电动势的方向仍不变。因电刷位置不变,每条支路内的感应电动势的方向正好互相抵消,A、B间的合成电动势等于0,如图3-26c所示。
(3)磁极低速旋转
如果定子磁极以很低的转速旋转,则电刷A、B间的感应电动势将是频率很低的交变电动势,如图3-27所示。
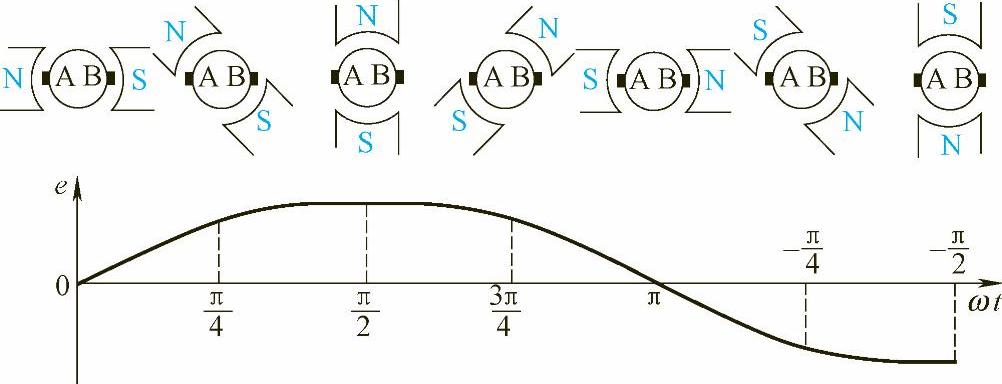
图3-27 磁极缓慢旋转的直流发电机
如果磁极的转速正好等于转差Δn,则电刷A、B间感应电动势的频率是:
fX=p·Δn/60=sf2S (3-20)
这里,我们得到了一个很有意思的结论:电枢绕组经整流子换向后,在电刷间得到的合成电动势取决于磁极相对于电刷的旋转速度:磁极静止时,电刷间得到的是直流电;磁极缓慢地旋转时,电刷间得到的是频率很低的交流电。并且,电刷A、B间得到的感应电动势的频率正好和定子绕组里的电动势频率相同。
3.改变电刷A、B的相对位置
现在,让磁极不动,而使电刷A、B在整流子上移动,看看其结果。
(1)电刷相向移动45°
这时,在AXB支路内的元件数减少了,但各元件里的电动势方向都相同,和电刷未移动前相比,合成电动势减少了;AYB支路内的元件数虽多,但有部分元件的电动势方向是相反而互相抵消的,合成电动势和AXB支路的相同,两电刷的极性分别是A“+”、B“-”,如图3-28a所示。
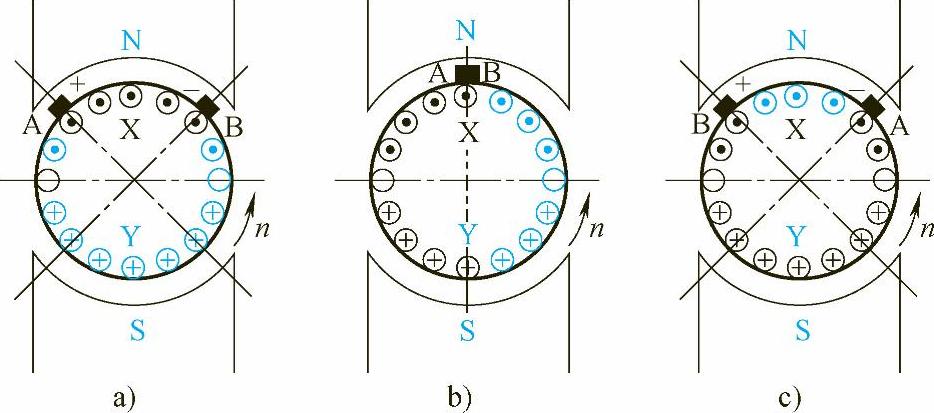
图3-28 磁极不动而改变电刷位置
a)相向移动 b)两电刷重合 c)再移动45°
(2)电刷再相向移动45°
这时,电刷A、B重合,两条支路也重合,都包含了所有元件,但两条支路中,所有元件的电动势都是互相抵消的,故合成电动势为0,如图3-28b所示。
(3)电刷再相向移动45°
这时的状态和图3-28a所示的状态相同,但电刷的极性反了,变成了A“-”、B“+”了,如图3-28c所示。
于是我们看到,如果两个电刷的相互位置能够在整流子上移动的话,两电刷间的合成电动势就可以平滑地进行调节了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。