



3.2.2.1 电磁转矩的产生
1.转子绕组产生感应电流
三相交流异步电动机的定子绕组里通入三相交变电流后,将产生旋转磁场,以同步转速n1旋转。
当磁场旋转时,转子绕组将反方向以速度v切割磁力线,并产生感应电动势,其方向由右手定则判定,如图3-14a所示。
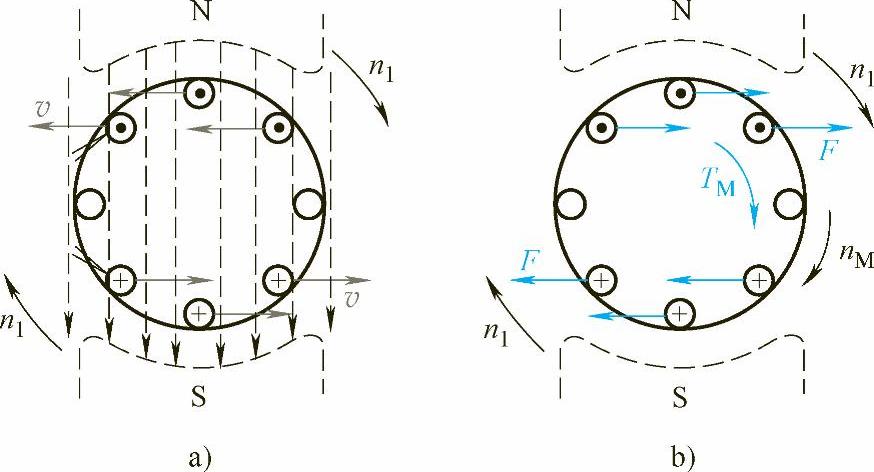
图3-14 异步电动机的旋转原理
a)转子绕组切割磁通 b)电流受到磁场的作用力
2.载流导体受力
因为转子绕组是自成回路的,所以导体内就有感应电流,成为载流导体。载流导体要受到磁场的作用力F,方向由左手定则判定,如图3-14b所示。这些作用力将形成以转子轴为中心的电磁转矩TM,在TM的作用下,转子将以转速nM旋转。
3.2.2.2 电磁转矩和功率因数的关系
1.cosφ2=1,φ2=0
这时,电流和电动势同相位,如图3-15a所示。图中,曲线①是感应电动势e2的曲线,感应电动势e2的曲线直接反映了磁通的变化情形,所以,曲线①也是磁通F的曲线。曲线②是感应电流i2的曲线。
为了便于说明,我们将转子绕组的笼条进行了编号1、2、3、4、5、6、7、8,各笼条中电动势的方向示于外层,电流的方向示于内层,如图3-15b所示。
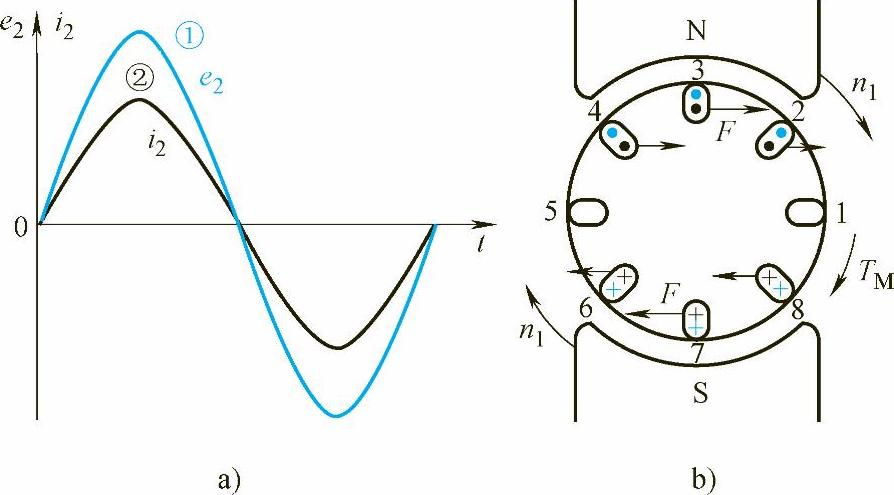
图3-15 cosφ2=1时的情形
a)电流与电动势的曲线 b)电磁转矩
因为电流和电动势同相位,故所有笼条内的电流方向都和电动势相同。
各笼条内的电流和磁场之间的电磁力如图3-15b中的F所示。由图可以看出,各笼条所受的作用力和转子轴之间形成的电磁转矩的方向都相同。所以,合成的电磁转矩TM是最大的。
2.cosφ2=0,φ2=π/2
这时,转子电流比电动势滞后π/2,如图3-16a所示。
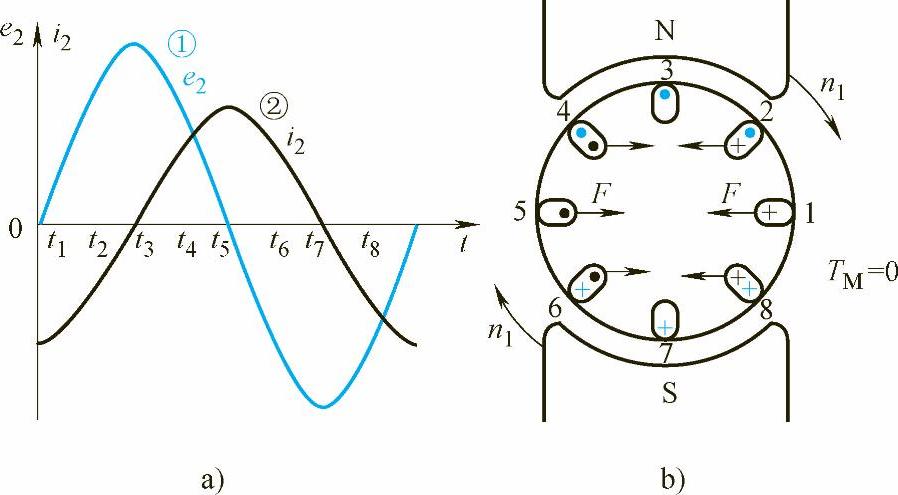
图3-16 cosφ2=0时的情形
a)电流与电动势的曲线 b)电磁转矩
笼条1的情形与时间t1的状态相对应,e2=0,i2为负振幅值。(https://www.xing528.com)
笼条2的情形与时间t2的状态相对应,e2为正值,i2为负值。
笼条3的情形与时间t3的状态相对应,e2为正振幅值,i2=0。
依此类推,得i2的空间分布情形如图3-16b所示。
由图可知,左、右两侧的笼条所受到的电磁力正好相等而方向相反,故合成的电磁转矩为0。
3.0<cosφ2<1,π/2>φ2>0
这时,转子电流比电动势滞后φ2角,如图3-17a所示。
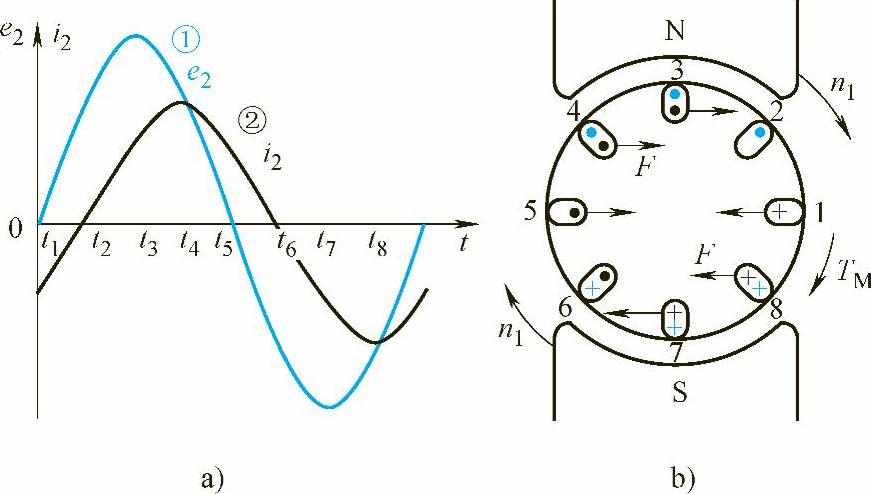
图3-17 0<cosφ2<1时的情形
a)电流与电动势的曲线 b)电磁转矩
笼条1的情形与时间t1的状态相对应,e2=0,i2为负值。
笼条2的情形与时间t2的状态相对应,e2为正值,i2为0。
笼条3的情形与时间t3的状态相对应,e2为正振幅值,i2为正值。
依此类推,得i2的空间分布情形以及各笼条所受电磁力的情形如图3-17b所示。其中:
笼条1和笼条5所受的电磁力相等而方向相反,互相抵消。
笼条3、4、7、8所受电磁力形成的电磁转矩的方向相同。
可见,此时的电磁转矩既不为0,也不是最大。并且,不难看出,cosφ2越大,电磁转矩也越大。所以,异步电动机电磁转矩的计算公式是:
TM=KTΦMI2cosφ2 (3-13)
式中 TM———电动机产生的电磁转矩,N·m;
KT———转矩系数;
ΦM———电动机的磁通,Wb;
I2———转子的电流,A;
cosφ2———转子的功率因数。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。