



1.5.4.1 和电磁制动器比
1.电磁制动器简介
电磁制动器的结构如图1-32a所示。

图1-32 炼胶机的控制电路
a)电磁制动器的结构 b)控制电路
在线圈通电前,制动瓦处于把制动轮抱紧的状态。
当衔铁被吸入后,水平拉杆和垂直拉杆都向上移动,使三角形拉杆逆时针旋转,一方面,D点将右移;另一方面,拉杆EF左移,C点也随之左移,结果,两侧的制动瓦松开,制动轮能够旋转。这时,制动弹簧处于被压缩的状态。
当线圈断电后,由于制动弹簧的作用,又恢复为制动瓦抱紧制动轮的状态。因此,它能够在断电的情况下使生产机械迅速地停住。
在橡胶机械中,应用比较普遍。以炼胶机为例,其主要控制电路如图1-32b所示。炼胶机从人身安全考虑,紧急时用接近开关(行程开关)SX来接通电磁制动器KZ,使机械迅速停机。实际上,操作工不管紧急与否,都用SX来停机。
2.主要缺点
1)电磁制动器结构复杂,体积大,故障率高;
2)电磁制动器使用次数多了,制动轮和制动瓦之间,常有滑动,停机的可靠性较差;
3)电磁制动器在线圈通电瞬间,冲击电流较大,使SX的触点容易损坏;
4)电磁制动器在停机过程中消耗功率较大。(https://www.xing528.com)
1.5.4.2 和反接制动比
在一些需要快速停机的生产机械中,反接制动也是常常采用的方法。以万能铣床为例,其主要控制电路如图1-33所示。
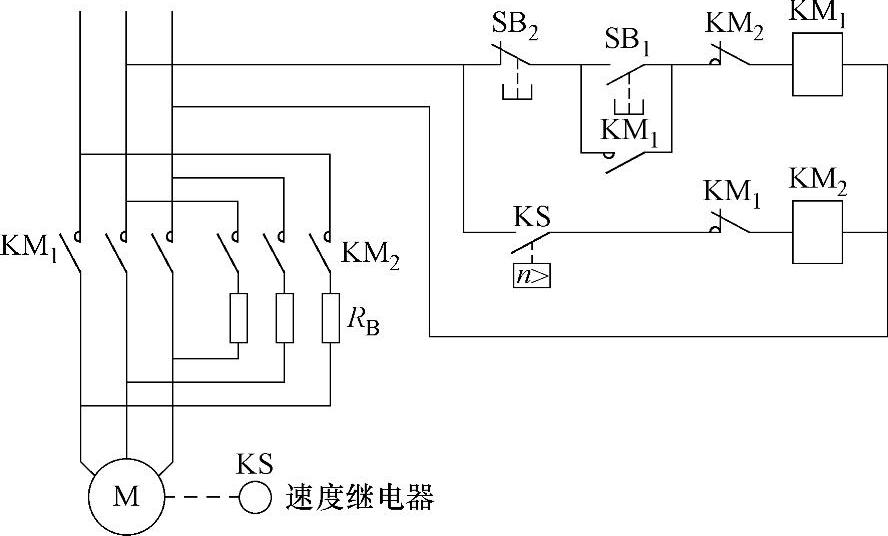
图1-33 反接制动的控制电路
1.反接制动的方法
制动时,令反向接触器KM2得电,使电动机反向运行,在电动机从正转运行到反转运行的过程中,当速度降为0的瞬间,由速度继电器KS使KM2断电。图1-33中,电阻RB是用来减小在反接瞬间的电流的。
2.主要缺点
1)由于接触器KM1的断开和KM2的接通所需要的时间不可能十分准确,加以速度继电器的动作与弹簧的弹力有关,也很难十分准确。所以,反接制动在停机时常伴有轻微的正转或反转,不能可靠地停住。
2)反接制动时,用于反接的接触器和速度继电器的故障率都较高。
3)反接制动时,制动电阻的耗能较大。
4)停电时,不能使机器迅速停住。
小小体会
本项目的原理并不复杂,难点在于储能电容器的电容量以多大为宜?直流电压又以多大为宜?要通过理论计算,将十分复杂,由于实际工作中,不允许拖延。通过由小加大,进行试验的方法,取得了成功。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。