



1.5.1.1 需要解决的问题
1.制动方式
电动机的能耗制动方式,是在停机时向定子绕组里通入直流电流,也叫直流制动,如图1-26a所示。其制动原理是:
当定子绕组里通入直流电流后,所产生的磁场是在空间不动的固定磁场,转子由于惯性继续旋转时,其绕组将切割固定磁场而产生感应电动势和感应电流,感应电流又受到磁场的作用力而形成制动转矩,如图1-26b所示。
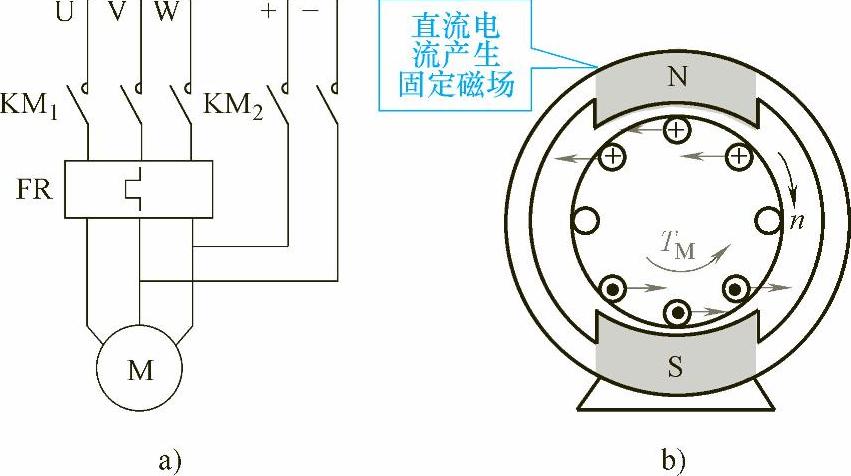
图1-26 能耗制动的方法和原理
a)能耗制动方法 b)能耗制动原理
2.必须储存足够的电能
停电时,电源没有了,由谁来提供直流电呢?只能依靠储存的电能来提供。考虑到电解电容器已能做到法拉级,使储存足够的电能成为了可能。就是说,在停电时可以由电解电容器来提供直流电流。
3.储能电路耗电的最小化
能耗制动时,向电动机绕组里通入的直流电流是较大的,如果在制动时向电源也索取同样大的电流,则不但设备费用昂贵,消耗电能也多,并不可取。
考虑到制动的时间十分短促,而生产机械停机的频率一般不可能十分频繁。就是说,每两次停机之间的时间间隔通常是较长的。所以,电容器可以用很小的电流充电,实现小电流充电,大电流放电。
1.5.1.2 主电路
1.储能元件的充放电
如上所述,主电路的核心是储能元件—电解电容器。如图1-27所示,SS是低压直流电源,其输出电压UD1的大小决定了电容器C1对电动机的放电电流,所以,和电动机所要求的制动转矩有关。根据实践经验,取UD1=30V,其制动转矩即已足够。
UD1通过电阻R1向电容器C1充电,如图中之虚线①所示。由于R1的电阻值很大,故充电电流i1很小,充电时间可达1min以上。二极管VD1用于保护C1,因为电动机的绕组会有续流电流,而电解电容器是不允许承受反方向电压的,所以,VD1既是电动机绕组的续流二极管,同时也对C1起到了保护作用。
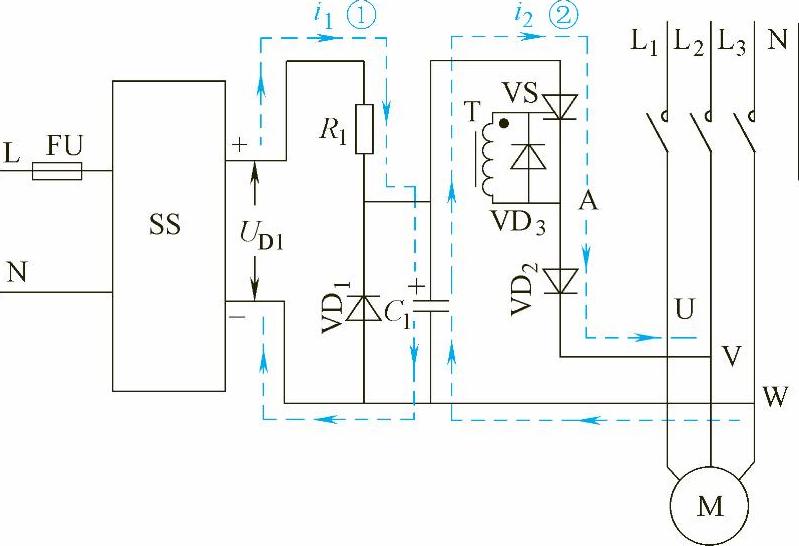
图1-27 能耗制动主电路
虚线②是电容器C1通过晶闸管VS和二极管VD2向电动机绕组放电的路径,由于电动机的等效阻抗很小,故放电电流I2很大。二极管VD2的作用有二:
1)防止在制动瞬间,电动机的反电动势把A点的电位提高,影响VS的触发效果;
2)当C1放电完毕后,提高一点A点的电位,使VS两端的电压更低,确保VS的截止。
2.主要元器件的选择
1)电阻R1:以尽量减小充电电流,从而减小直流电源的容量为原则。
选R1≥10kΩ/0.5W
2)电容器C1:以能够向电动机提供足够的制动电流为原则。
选C1=50000μF/100V
这样,充电时间常数为
τ=R1C1=104×50000×10-6s=500s=8.3min
如果每次的停机时间不足8min的话,可通过适当减小R1进行调整。
1.5.1.3 停电的采样电路
1.基本要求
必须避免在电源电压尚未消失的状态(包括缺相)下向电动机通入直流电流。
2.采样电路
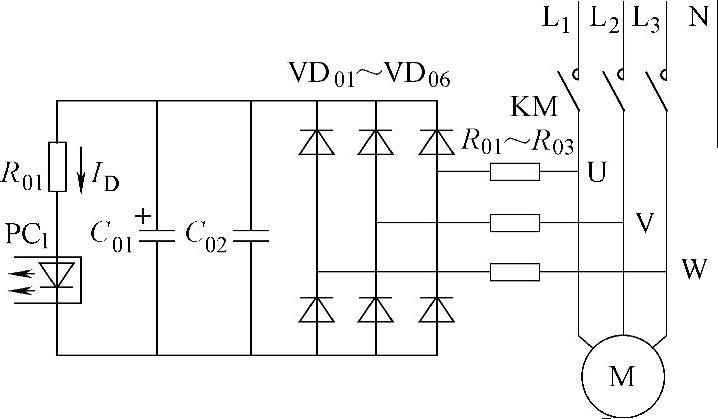
如图1-28所示:
正常工作时,接触器KM得电,电动机侧的三相电压经VD01~VD06全波整流后将电流ID通入光耦合器PC的二极管中,光耦合器处于导通状态。
 (https://www.xing528.com)
(https://www.xing528.com)
图1-28 停电的采样电路
停机时,接触器KM断开,电动机侧的三相电压为0V,光耦合器PC的二极管电流ID=0A,处于截止状态。
3.主要元器件的选择
(1)光耦合器
选PC817光耦合器,其主要参数是:
二极管正向压降:≤1.2V;
二极管正向电流:ID≤50mA;
电流传输比:实测结果,CTR=200%;
晶体管饱和压降:UCES=0.1V;
晶体管电流:IT≤50mA。
(2)滤波电容器C01
C01太小,影响滤波效果;太大,又会影响停电时的反应灵敏度。今选
C01=100μF/25V
(3)抗干扰电容器C02
由于滤波用的电解电容器具有一定量的分布电感,不能吸收外来的高频干扰信号。C02就是用来吸收高频干扰信号的。可选
C02=0.047μF
(4)限流电阻R01~R03
限流电阻用于降低整流电路的电压,并把流入光耦合器的电流限制在允许范围内。
根据实验,选R01~R03=50kΩ
电阻的功率选P01~P03=2W
(5)整流二极管VD01~VD06
选1N4007,最大反向峰值电压为100V。
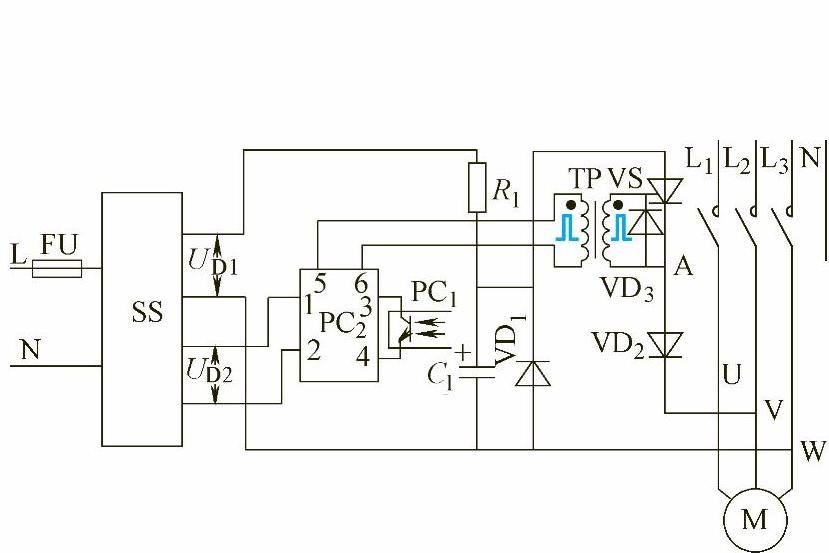
图1-29 晶闸管的控制电路
1.5.1.4 晶闸管的控制电路
普通电动机的停机控制:
停机的控制电路如图1-29所示,控制电路的电源电压取UD2=15V。图中的PC2是晶闸管的触发集成电路,PC2各引脚的功能如下:
1脚和2脚:低压直流电源的输入端;
3脚和4脚:停电信号的输入端;
5脚和6脚:脉冲信号的输出端。
TP是脉冲变压器。
正常运行时,PC1的二极管中有电流,晶体管导通,PC2的3脚为低电位,5脚和6脚并无脉冲输出。
停机时,PC1二极管中的电流突降为0A,晶体管截止,PC2的3脚翻转为高电位,5脚和6脚将输出脉冲信号,并通过脉冲变压器TP将脉冲信号传递给晶闸管VS的触发极,VS导通,电容器C1通过VS和VD2向电动机放电,使电动机因得到直流电流而迅速停住。
C1的放电过程很快就结束,UD1又开始通过R1向C1充电,为下一次的停机做准备。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。