



接近开关又称无触头行程开关。它能在一定的距离(几毫米至几十毫米)内检测有无物体靠近。当物体与其接近到设定距离时,就可以发出“动作”信号,而不像机械式行程开关那样,需要施加机械力。它给出的是开关信号(高电平或低电平),多数接近开关具有较大的负载能力,能直接驱动中间继电器。
接近开关的核心部分是“感辨头”,它必须对正在接近的物体有很高的感辨能力。在生物界里,眼镜蛇的尾部能感辨出人体发出的红外线。而电涡流探头就能感辨金属导体的靠近。但是应变片、电位器之类的传感器就无法用于接近开关,因为它们属于接触式测量。
多数接近开关已将感辨头和测量转换电路做在同一壳体内,壳体上多带有螺纹或安装孔,以便于安装和调整。
接近开关的应用已远超出行程开关的行程控制和限位保护范畴。宦可以用于高速计数、测速,确定金属物体的存在和位置,测量物位和液位,用于人体保护和防盗以及无触头按等。
即使仅用于一般的行程控制,接近开关的定位精度、操作频率、使用寿命、安装调整的方便性和耐磨性、耐腐蚀性等也是一般机械式行程开关所不能相比的。
1.常用的接近开关分类
1)自感式、差动变压器式:它只对导磁物体起作用;
2)电涡流式(以下按行业习惯称其为电感接近开关):它只对导电良好的金属起作用;
3)电容式:它对接地的金属或地电位的导电物体起作用,对非地电位的导电物体灵敏度稍差;
4)磁性干簧开关(也叫干簧管):它只对磁性较强的物体起作用;
5)霍尔式:它只对磁性物体起作用。
从广义来讲,其他非接触式传感器均能用作接近开关。例如,光电传感器、微波和超声波传感器等。但是它们的检测距离一般均可以做得较大,可达数米甚至数十米,所以多把它们归入电子开关系列。
2.接近开关的特点
与机械开关相比,接近开关具有如下特点:
1)非接触检测,不影响被测物的运行工况;
2)不产生机械磨损和疲劳损伤,工作寿命长;
3)响应快,一般响应时间可达几毫秒或十几毫秒;
4)采用全密封结构,防尘性能较好,工作可靠性强;
5)无触头、无火花、无噪声,所以适用于要求防爆的场合(防爆型);
6)输出信号大,易于与计算机或可编程序控制器(PLC)等接口;
7)体积小,安装、调整方便。
它的缺点是触头容量较小,输出短路时易烧毁。
3.接近开关的主要特性
(1)额定动作距离
在规定的条件下所测定到的接近开关的动作距离(mm);
(2)工作距离
接近开关在实际使用中被设定的安装距离。在此距离内,接近开关不应受温度变化、电源波动等外界干扰而产生误动作;(https://www.xing528.com)
(3)动作滞差
指动作距离与复位距离之差的绝对值。滞差大,对外界的干扰以及被测物的抖动等的抗干扰能力就强;
(4)重复定位精度(重复性)
它表征多次测量动作距离。其数值的离散性的大小一般为动作距离的1%~5%。离散性越小,重复定位精度越高。
(5)动作频率
指每秒连续不断地进入接近开关的动作距离后又离开的被测物个数或次数。若接近开关的动作频率太低而被测物又运动得太快时,接近开关就来不及响应物体的运动状态,有可能造成漏检。
接近开关的外形如图6-27所示,可根据不同的用途选择不同的型号。图6-27a的形式便于调整与被测物的间距。图6-27b、c的形式可用于板材的检测,图6-27d、e可用于线材的检测。

图6-27 接近开关的几种结构形式
a)圆柱形 b)平面安装型 c)方型 d)槽型 e)贯穿型
4.接近开关的规格及接线方式
图6-28所示为接近开关的一种典型三线制接线方式。棕色引线为正电源(18~35V);蓝色接地(电源负极);黑色为输出端。有常开、常闭之分。可以选择继电器输出型,但更多的是采用OC门作为输出级。OC门又有PNP和NPN之分。现以NPN、常开(较为常见)为例来说明输出端的使用注意事项。
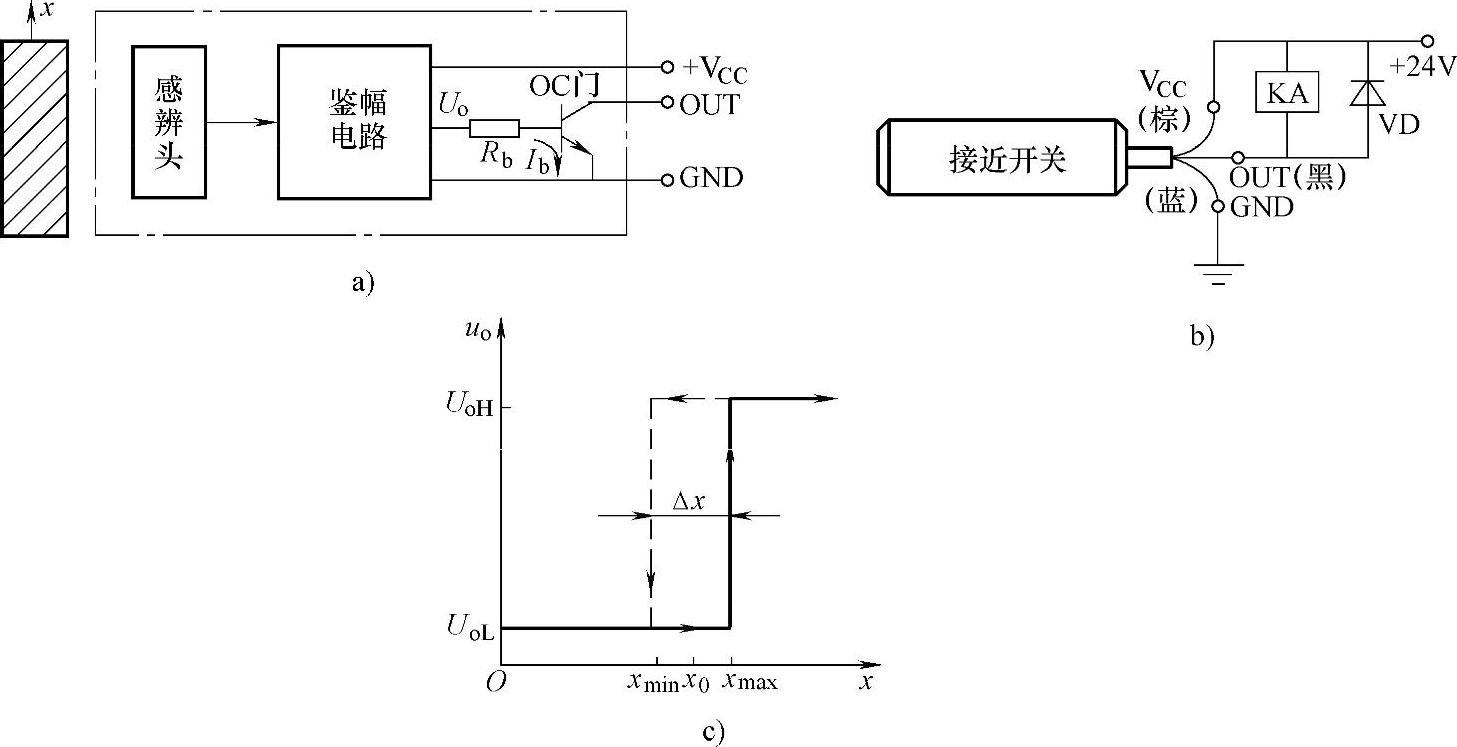
图6-28 接近开关框图及典型接法
a)三线制接近开关 b)NPN、OC门常开输出电路 c)输出波形
当被测物体未靠近接近开关时,Ib=0,OC门截止,OUT端为高阻态(接入负载后为高电平);当被测体靠近到动作距离时,OC门的输出端对地导通,OUT端对地为低电平。将中间继电器KA跨接在+VCC与OUT端上时,KA就处于吸合(得电)状态。
工作过程中,若续流二极管VD虚焊或未接,当接近开关复位的瞬间,KA产生的过电压有可能将OC门击穿。如果不慎将+VCC与OUT端短接,在接近开关动作时,就会有过电流流入OC门的集电极,并可能将其烧毁。
5.接近开关在刀架选刀控制中的应用
在图6-29a和图6-29b中,回转刀架根据数控系统发出的刀位指令控制刀架回转,将选定的刀具定位在加工位置。刀架在回转过程中,每转过一个刀位,就发出一个信号,该信号与数控系统的刀位指令进行比较,当刀架的刀位信号与指令刀位信号相符时,表示选刀完成。图6-29c为数控车床某回转刀架的组成。
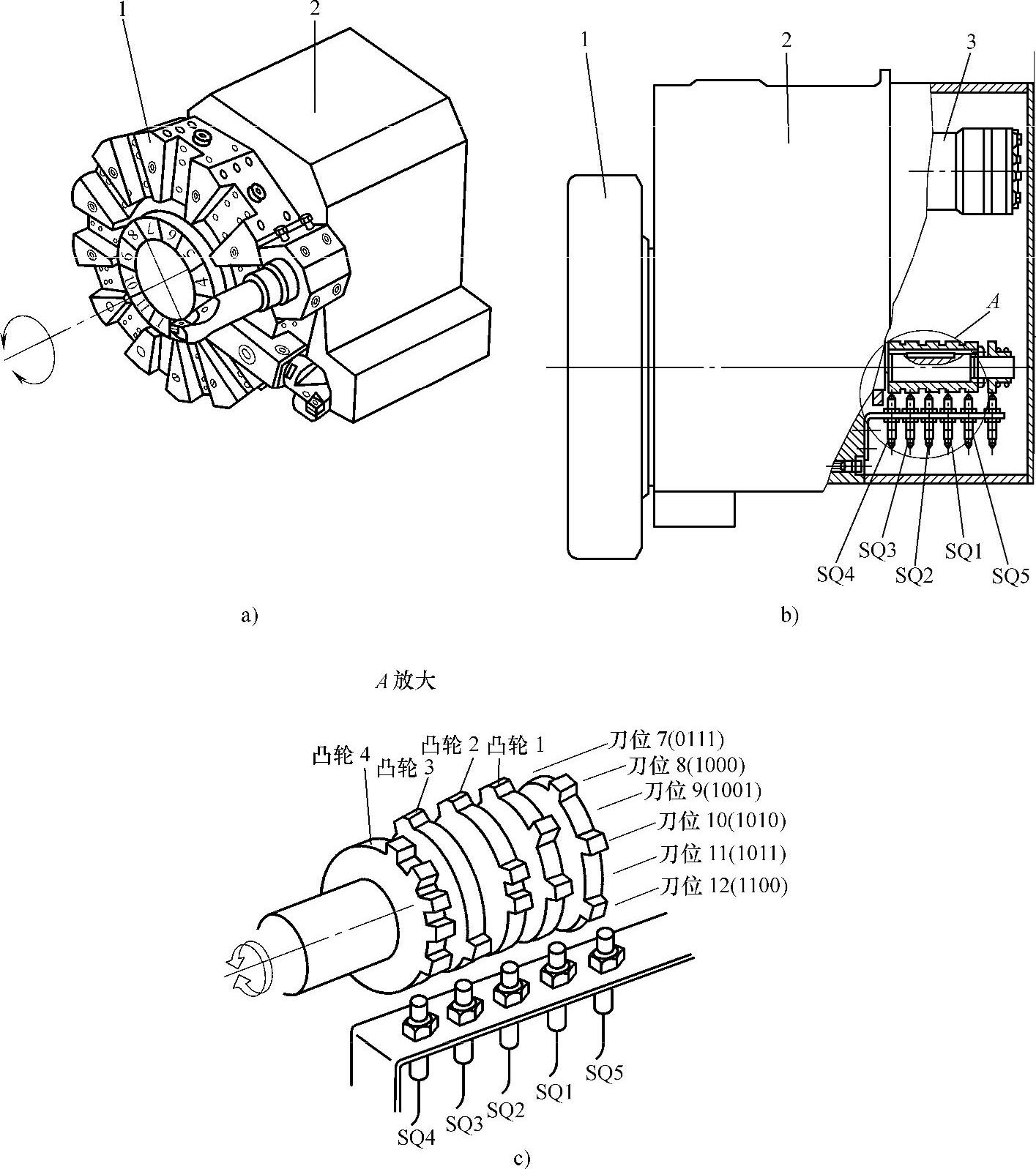
图6-29 回转刀架
a)回转刀架 b)接近开关在回转刀架中的配置 c)选刀用接近开关及感应凸轮 1—刀架 2—壳体 3—驱动电动机
刀架回转由刀架电动机或回转油缸通过传动机构来实现,刀架回转时,与刀架同轴的感应凸轮也随之旋转。在图6-29c,中从左边往右的四个凸轮组成四位二进制编码,共计24即16个刀位,每一个编码对应一个刀位。例如1001对应9号刀位,0110对应6号刀位。与感应凸轮相对应的是固定在刀座上的接近开关SQ4~SQ1,一般多选用第四章介绍的电感(电涡流)式接近开关。当感应凸轮的凸起与接近开关相对时,接近开关输出为“1”,反之为“0”。从图6-29c可以看到,凸轮4~1与接近开关SQ4(最高位)~SQ1(最低位)的对应关系是1100,由此可见,当前刀架所处的刀位是12号刀。最右边凸轮与接近开关SQ5用于奇偶校验以减少出错的可能。当编码是偶数时,SQ5置“1”;当编码是奇数时,SQ5置“0”,图6-30所示为选刀控制流程图。
接近开关除了在刀架选刀控制外,还在数控机床中还常用作工作台、油缸的行程控制等。
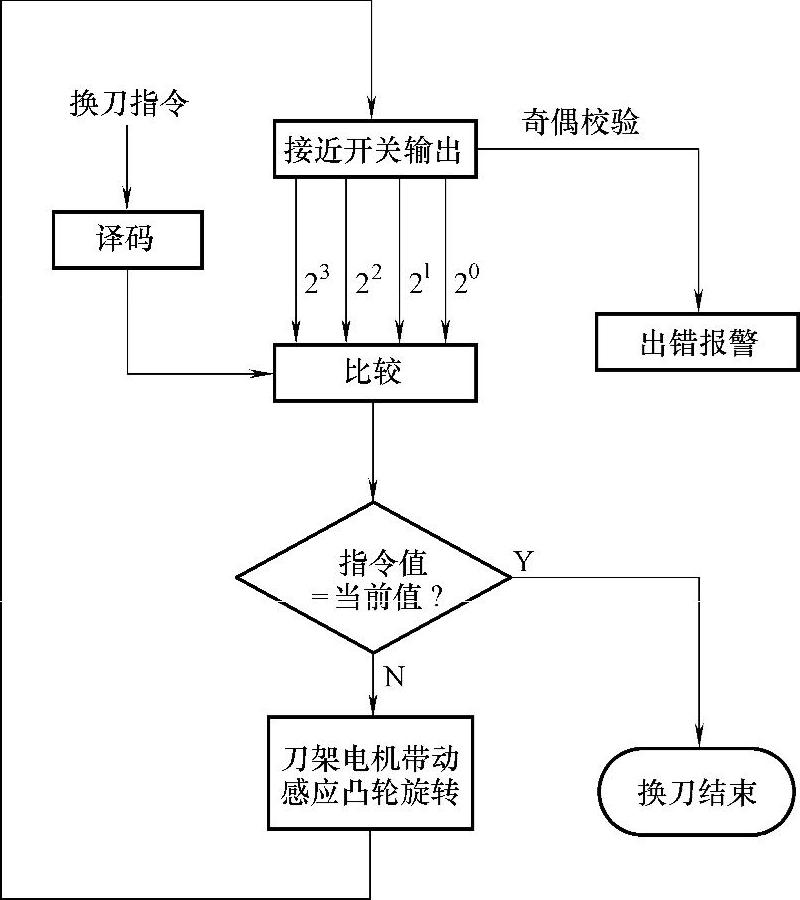
图6-30 选刀控制流程图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。