



磁栅传感器是由磁栅(又名磁尺)与磁头组成,它是一种比较新型的传感元件。与其类型的检测元件相比较,磁栅传感器有制件工艺简单、复制方便、易于安装、调整方便、检测范围广(从0.001mm到几m)、不需要接长等一系列优点,因而在大型机床的数字检测和自动化机床的自动控制等方面得到广泛的应用。本单元仅介绍磁栅位移传感器。
1.磁栅位移传感器
(1)磁栅的结构
如图6-16所示,磁栅基体1是用非导磁材料(如玻璃、磷青铜等)做成的,上面镀上一层均匀的磁性薄膜2(即磁粉如Ni-Co或Co-Fe合金等),经过录磁(见图6-17),其磁信号排列情况如图6-16所示。目前常用的磁信号节距为0.05mm和0.20mm两种。
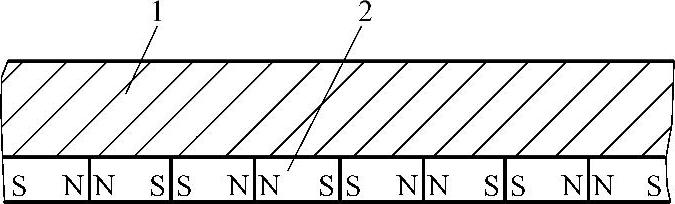
图6-16 磁栅结构图
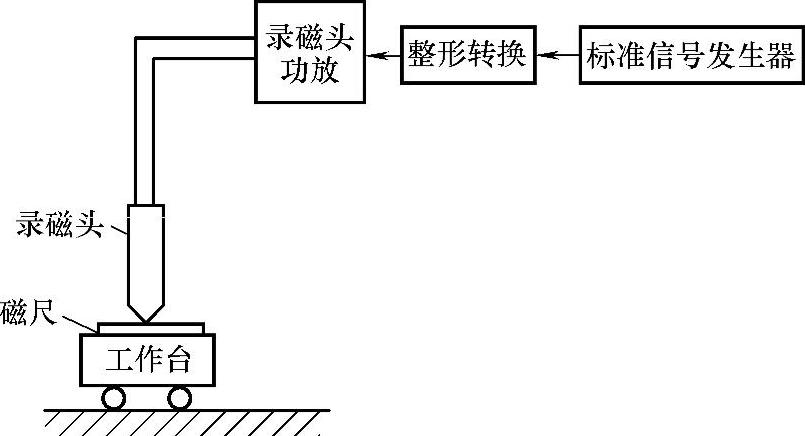
图6-17 磁栅录磁框图
(2)磁栅的类型
磁栅可分为长磁栅和圆磁栅两大类。前者用于检测直线位移,后者用于检测角位移。长磁栅又可分为尺形、带形、同轴形,如图6-16所示。目前用得比较广泛的是尺形磁栅(见图6-18a)和带形磁栅(见图6-18b),而同轴形磁栅(见图6-18c所示)结构特别小巧,可用于结构比较紧凑的场合。
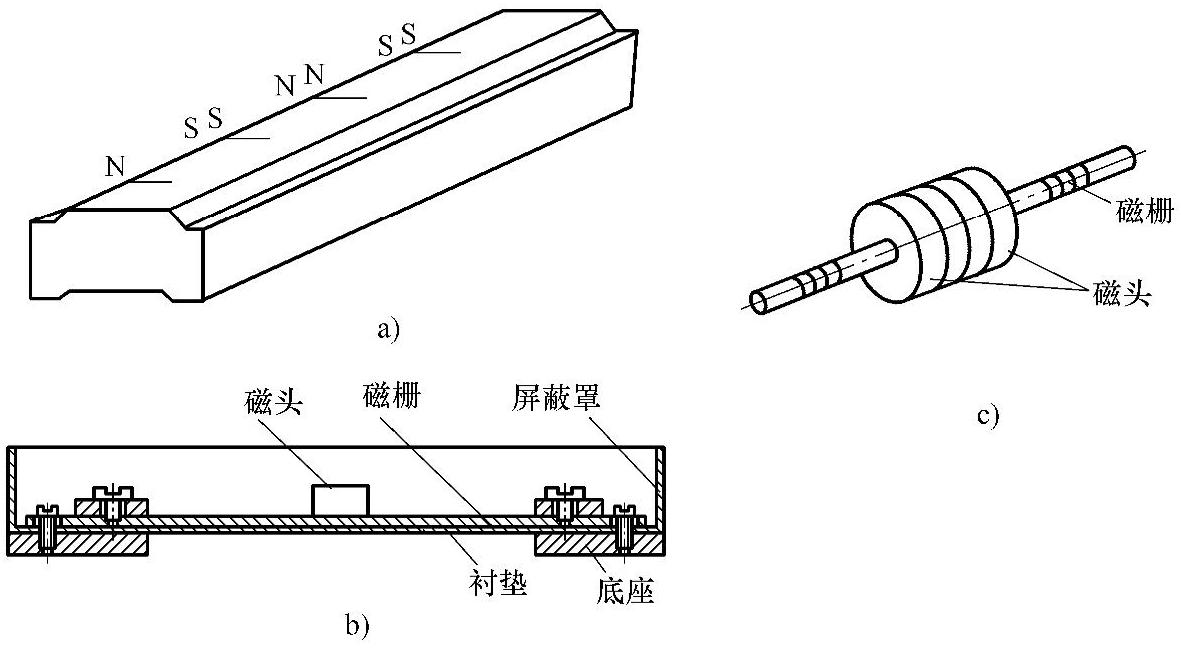
图6-18 几种长磁栅结构图
(3)对磁栅的要求
磁栅的基尺要求不导磁,线鼓胀系数应与仪器或机床的相应部分相近似。又因为在基尺上要镀一层磁性薄膜,所以要求基尺有良好的加工和电镀性能。当采用一般钢材作基尺材料时,必须用镀铜的方法解决绝磁的问题,铜镀层厚度约0.15~0.20mm。
为了使磁尺上录的磁信号能长时期保存,并希望产生较大的输出信号,要求磁性薄膜剩磁感应Br要大,矫顽力Hc要高,电镀要均匀。目前常用Ni-Co-P合金。
对磁尺表面要求长磁栅平直度0.005~0.01mm/m,圆磁栅的不圆度0.005~0.01mm,表面粗糙度要小。所录磁信号要求幅度均匀,幅度变化小于10%,节距均匀,满足一定精度要求。
2.磁头
磁栅上的磁信号先由录磁头录好,然后由读磁头将磁信号读出。按读取信号的方式,读磁头可分为动态磁头与静态磁头两种。
(1)动态磁头
动态磁头又称为速度响应式磁头,它只有一组输出绕组,只有当磁头磁栅有相对运动时,才有信号输出。普通常见的录音机信号取出就属此类。
图6-19所示为动态读磁头的实例。磁心材料为铁镍合金(Ni的质量分数为80%)片,每片厚度为0.20mm,叠成需要的厚度(例如3mm—窄型或18mm—宽型)。前端放入0.01mm厚的铜片,后端磨光靠紧。线圈线径d=0.05mm,匝数N=(2×1000)∼(2×1200)匝,电感L=4.5H。(https://www.xing528.com)
用此类磁头读取信号。如图6-20所示,图中1为动态磁头,2为磁栅,3为读出的正弦信号。此信号表明磁信号在N、N相重叠处为正的最强,磁信号在S、S重叠处为负的最强。图中ω为磁信号节距。由此当磁头沿着磁栅表面作相对位移时,就输出周期性的正弦电信号,若记下输出信号的周期数n,就可以检测出位移量s=nω。
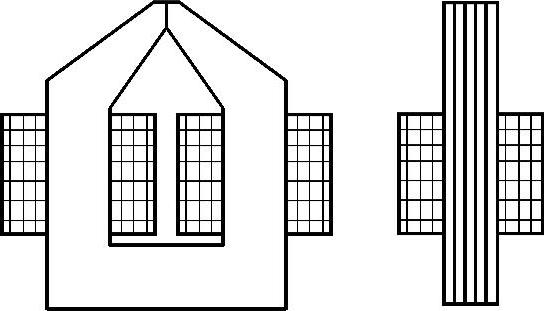
图6-19 动态磁头结构
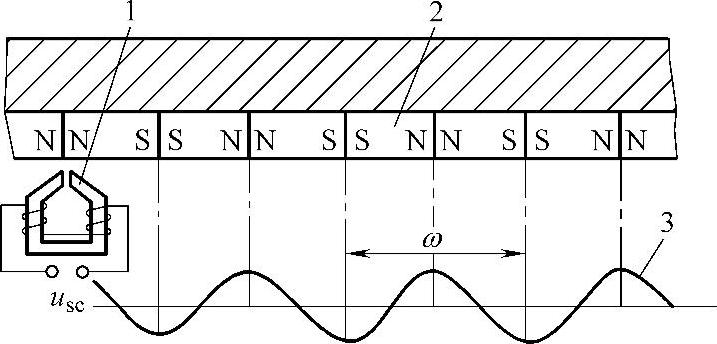
图6-20 动态磁头读取信号
(2)静态磁头
静态磁头叉称磁通响应式磁头,它在磁头和磁栅间没有相对运动的情况下也有信号输出。
图6-21所示为静态磁头结构。它有两组绕组,一组为励磁绕组,N1=4×15-4×20匝,另一组为输出绕组N2=100-200匝,线径d1=d2=0.10mm,磁心材料也是铁镍合金。
读取信号的原理如图6-22所示,图中l为静态磁头,2为磁栅,3为磁头读出信号。在静态磁头励磁绕组中通过交流励磁电流,使磁心的可饱和部分(截面较小)在每周内两次被电流产生的磁场饱和,这时磁心的磁阻很大,磁栅上的漏磁通不能由磁心流过输出绕组而产生感应电动势。只有在励磁电流每周再次过零时,可饱和磁心不被饱和时,磁栅上的漏磁通才能流过输出绕组的磁心而产生感应电动势,其频率为励磁电流频率的两倍,输出电压的幅值与进入磁心漏磁通的大小成比例。
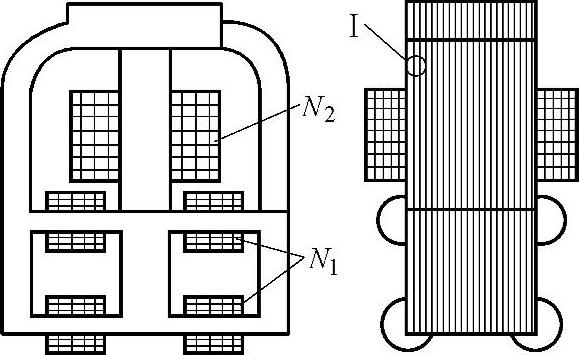
图6-21 静态磁头结构
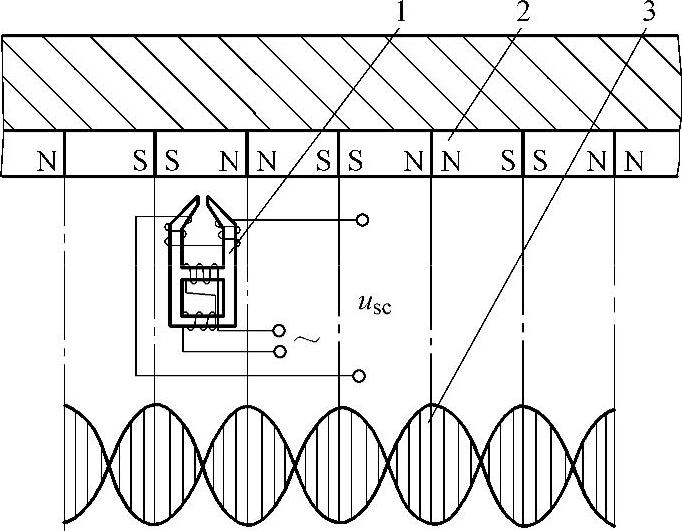
图6-22 磁栅读取信号
3.磁栅位移传感器应用
现以应用较为成熟的鉴相型磁栅数字位移显示装置(简称为磁栅数显表)作为磁栅传感器应用例子。如图6-23所示。图中400kHz晶体振荡器是磁头励磁及系统逻辑判别的信号源。由振荡器输出方波信号,经分频器后输出,变为5kHz(10kHz)的方波信号,该方波信号作为励磁电路的输入信号,励磁电路输出信号对磁头进行励磁;由于磁头处于1/4的磁节距,因此磁头输出信号为两个互为正交的交流信号。由于磁头铁心存在剩磁,所以设置偏磁调整电位器,对磁头的输出加上一微小的直流电流(称之为偏磁电流),通过调整偏磁电位器以使两磁头的剩磁情况对称,可以获得两路较对称的输出电信号。经过上述处理后,将两路信号送入求和放大电路,使输出的合成信号的相位与磁头和磁栅的相对位置相对应。再将此输出信号送入一个“带通滤波器”,滤去高频、基波、干扰等无用的信号波,取出二次谐波(10kHz的正弦波),此正弦波的相位角是随磁头与磁栅的相对位置变化而变化的。当磁头相对磁栅位移一个节距w=0.2mm时,其相位角就变化了一个360°。检测此正弦波的相位变化,就能得到磁头和磁栅的相对位移量的变化。
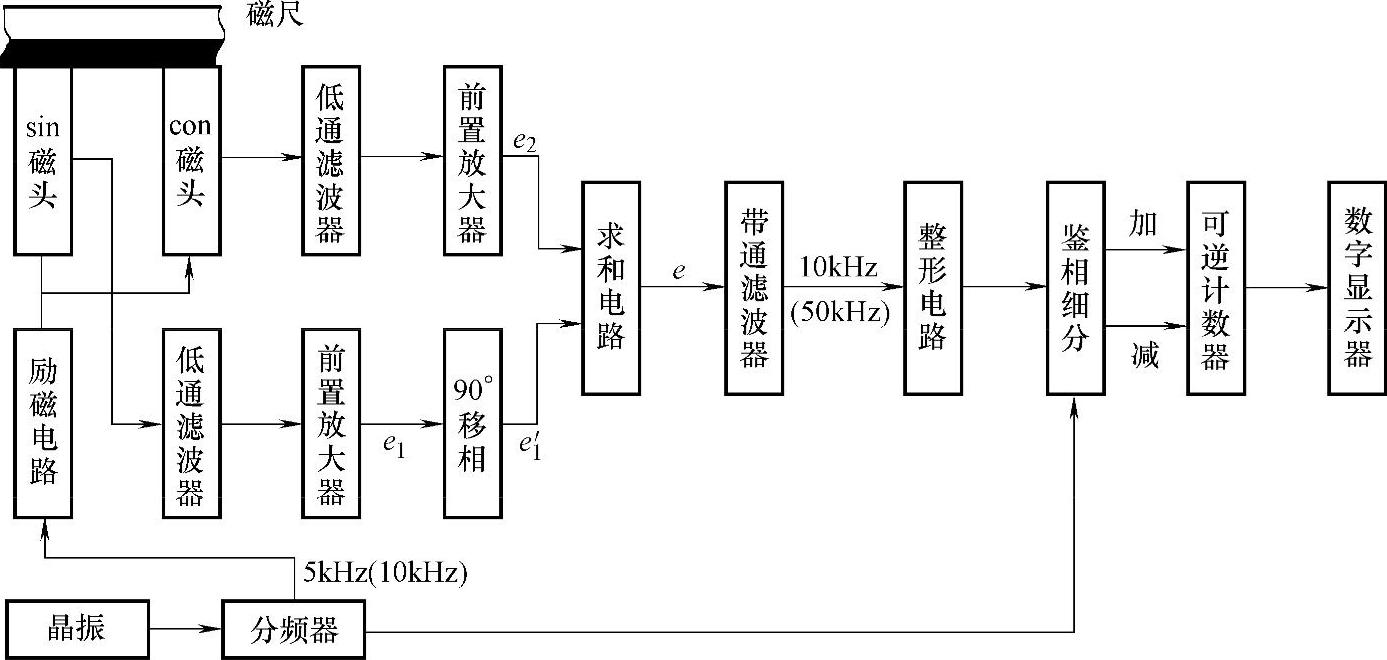
图6-23 鉴相器磁栅数显表框图
为了检测更小的位移量,需要在一个节距钯内进行电气细分。即将输出的正弦波送到限幅整形电路,使其成为方波。经“相位微调电路”,进入“检相内插细分”电路。每当相位变化9°时,检相内插细分电路输出一个计数脉冲。此脉冲表示磁头相对磁栅位移5µm(因 ,故
,故 )。磁头相对磁栅的位移方向是由相位超前或滞后一个预先设计好的基准相位来判别的。例如磁头相对磁栅朝右方向移动时,相位是超前的,则检相内插电路输出“+”脉冲,若反之,检相内插电路输出“−”脉冲。“+”和“−”脉冲经方向判别电路送到可逆计数器记录下来,再经译码显示电路指示出磁头与磁栅的相对位移量。
)。磁头相对磁栅的位移方向是由相位超前或滞后一个预先设计好的基准相位来判别的。例如磁头相对磁栅朝右方向移动时,相位是超前的,则检相内插电路输出“+”脉冲,若反之,检相内插电路输出“−”脉冲。“+”和“−”脉冲经方向判别电路送到可逆计数器记录下来,再经译码显示电路指示出磁头与磁栅的相对位移量。
如果位移量小于5µm时,则检相内插电路关闭,无计数脉冲输出,此时其位移量由表头指示出来。此外系统还设置了置数、复“0”和预置“+”、“−”符号。为了保证末位数字显示清晰,仪器还设置了相位微调电路等。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。