



1.数字式位置测量特点
在数控机床中,位置测量主要是指直线位移和角位移的精密测量。数字式位置传感器正好能满足这种要求,目前得到广泛应用的有脉冲编码器、光栅、磁栅等测量技术。
数字式位置测量就是将被测的位置量以数字的形式来表示,它具有以下特点:
1)将被测的位置量直接转变为脉冲个数或编码,便于显示和处理;
2)测量精度取决于分辨力,和量程基本无关;
3)输出脉冲信号的抗干扰能力强。
数字式位置传感器可以单独组成数字显示装置(简称数显),专门用于位置测量和测量结果显示,也可以和数控系统组成位置控制系统。
2.直接测量和间接测量
位置传感器有直线式和旋转式两大类。若位置传感器所测量的对象就是被测量本身,即直线式传感器测直线位移,旋转式传感器测角位移,则该测量方式为直接测量。例如直接用于直线位移测量的直线光栅和长磁栅等;直接用于角度测量的脉冲编码器、圆光栅、圆磁栅等。
若旋转式位置传感器测量的回转运动只是中间值,由它再推算出与之关联的移动部件的直线位移,则该测量方式为间接测量,图6-1所示为直接测量和间接测量示意图。
 (https://www.xing528.com)
(https://www.xing528.com)
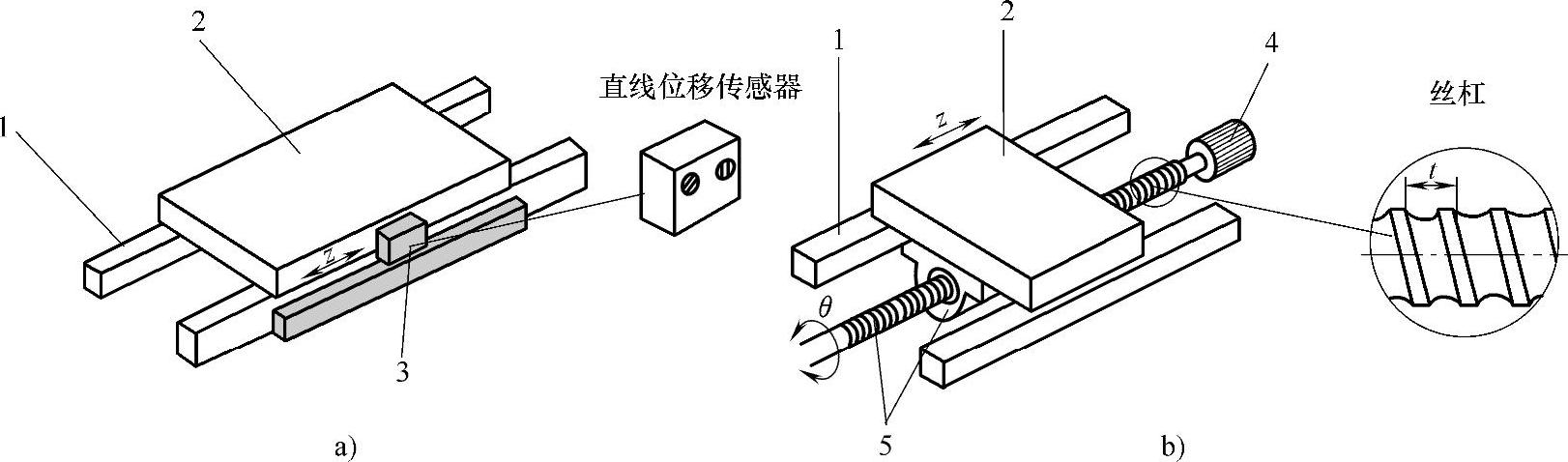
图6-1 直接测量和间接测量示意图
a)直接测量 b)间接测量 1—导轨 2—运动部件 3—直线位移传感器 4—旋转式位置传感器 5—丝杠/螺母副
图6-1中,丝杠的正、反向旋转通过螺母带动运动部件作正、反向直线运动。若测量对象为运动部件的直线位移,则安装在移动部件上的直线式位置传感器即为直接测量,如图6-1a所示;而安装在丝杠上的旋转式位置传感器通过测量丝杠旋转的角度可间接获得移动部件的直线位移,即为间接测量,如图6-1b所示。
【实例】设丝杠螺距t=6.00mm(当丝杠转一圈360°时,螺母移动的直线距离),旋转式位置传感器测得丝杠旋转角度为7290°,求螺母的直线位移x。
解:螺母的直线位移,x=(6mm/360°)×7290°=121.50mm。
用直线式位置传感器进行直线位移的直接测量时,传感器必须与直线行程等长,测量范围受传感器长度的限制,但测量精度高;而用旋转式进行间接测量时则无长度限制,但由于存在着直线与旋转运动的中间传递误差,如机械传动链中的间隙等,故测量精度不及直接测量。能够将旋转运动转换成直线运动的机械传动装置除了丝杠-螺母外,还有齿轮-齿条等传动装置。
3.增量式和绝对式测量
增量式测量的特点是只能获得位移增量。在图6-1中,移动部件每移动一个基本长度单位,位置传感器便发出一个测量信号,此信号通常是脉冲形式。这样,一个脉冲所代表的基本长度单位就是分辨力,对脉冲计数,便可得到位移量。例如,增量式测量系统的分辨力为0.01mm,则移动部件每移动0.01mm,位置传感器便发出一个脉冲,计数器加1或减1。当计数值为200时,表示工作台移动了0.01mm×200=2.00mm。
增量式位置传感器必须有一个零位标志,作为测量起点的标志,见图6-4中的序号4。即使如此,如果中途断电,增量式位置传感器仍然无法获知移动自件的绝对位置9典型的增量式位置传感器有增量式光电编码器、光栅等。
绝对式测量的特点是,每一被测点都有一个对应的编码,常以二进制数据形式来表示绝对式测量即使断电之后再重新上电,也能读出当前位置的数据。典型的绝对式位置传感器有绝对式脉冲编码器。在这种装置中,编码器所对应的每个角度都有一组二进制数据与之又应。能分辨的角度值越小,所要求的二进制位数就越多,结构就越复杂。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。