



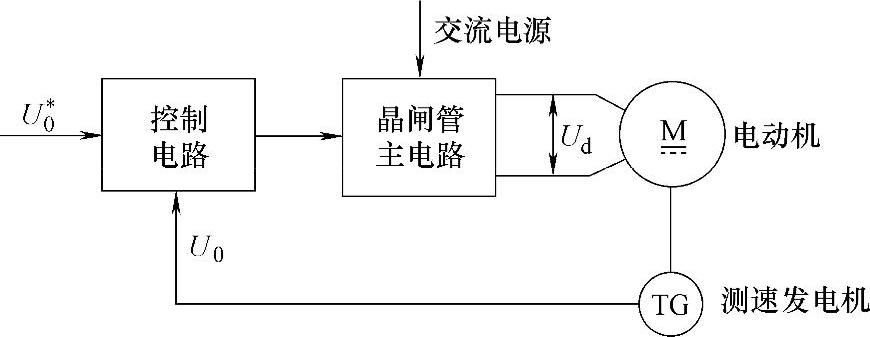
图5-14 晶闸管直流调速基本原理框图
直流伺服电动机速度控制单元的作用是将转速指令信号转换成电枢的电压值,达到速度调节的目的。现代直流电动机速度控制单元常采用的调速方法有晶闸管(Semiconductor Control Rectifier,SCR)调速系统和晶体管脉宽调制(Pulse Width Modulation,PWM)调速系统。
1.晶闸管调速系统
在大功率及要求不很高的直流伺服电动机调速控制中,晶闸管调速控制方式仍占主流。图5-14所示为晶闸管直流调速基本原理框图。由晶闸管组成的主电路在交流电源电压不变的情况下,通过控制电路可方便地改变直流输出电压的大小,该电压作为直流电动机的电枢电压Ud,即可成为直流电动机的调压调速方式。图5-14中,改变速度控制电压Un*即可改变电枢电压Ud,从而得到速度控制电压所要求的电动机转速。由测速发电机获得的电动机实际转速电压Un作为速度反馈与速度控制电压Un*进行比较,形成速度环,目的是改善电动机运行的机械特性。
晶闸管调速系统采用的是大功率晶闸管,它的作用有两个,一是用作整流,将电网交流电源变为直流;将调节回路的控制功率放大,得到较高电压与较大电流以驱动电动机。二是在可逆控制电路中,电动机制动时,把电动机运转的惯性能转变为电能,并回馈给交流电网,实现逆变。为了对晶闸管进行控制,必须设有触发脉冲发生器,以产生合适的触发脉冲。该脉冲必须与供电电源频率及相位同步,保证晶闸管的正确触发。
图5-15所示为数控机床中较常见的一种晶闸管直流双环调速系统图。该系统是典型的串级控制系统,内环为电流环,外环为速度环,驱动控制电源为晶闸管变流器。
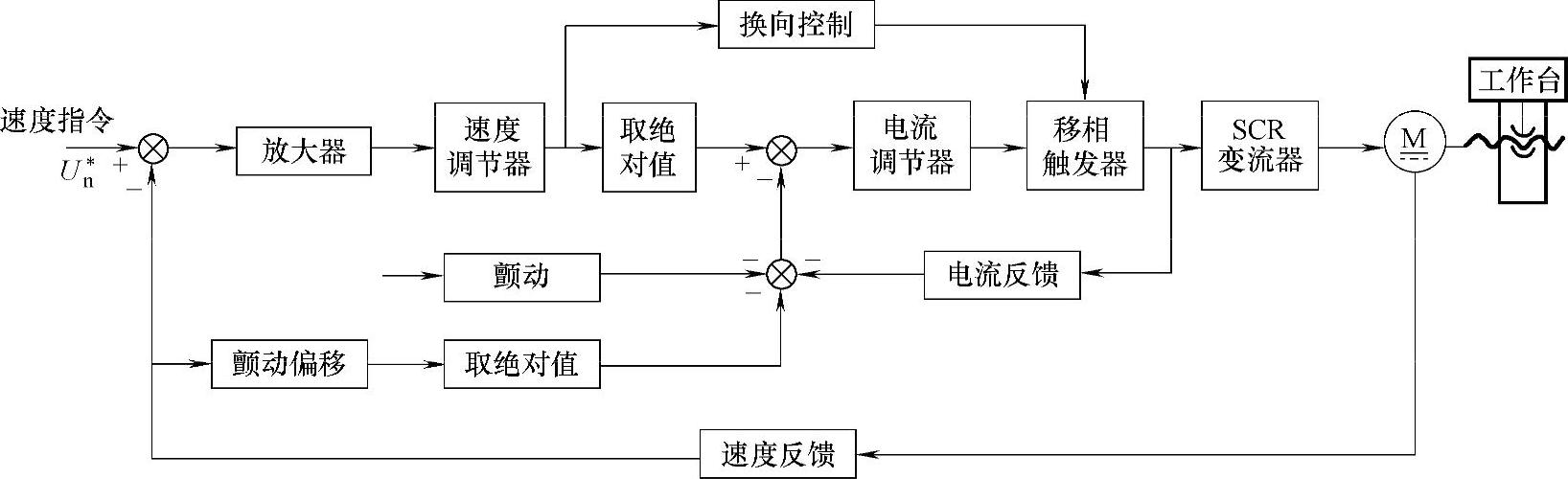
图5-15 直流双环调速系统图
速度调节器的作用是使电动机转速n跟随给定电压Un*变化,保证转速稳态无静差;对负载变化起抗干扰作用;速度调节器输出限幅值决定电枢主电路的最大允许电流值Idm。电流调节器的作用是对电网电压波动起及时抗干扰的作用;起动时保证获得允许的最大电流Idm;在转速调节过程中,使电枢电流跟随其给定电压值变化;当电动机过载甚至堵转时,即有很大的负载干扰时,可以限制电枢电流的最大值,从而起到快速的过电流安全保护作用,如果故障消失,系统能自动恢复正常工作。
直流晶闸管调速系统的工作原理阐述如下:
1)当速度指令信号增大时,速度调节器输入端的偏差信号加大,速度调节器的放大器输出随之增加,电流调节器输入和输出同时增加,因此使触发器的输出脉冲前移(即减小晶闸管触发角α的值),SCR变流器输出电压增高,电动机转速上升。同时速度检测信号值增加,当达到给定的速度值时,偏差信号为0,系统达到新的平衡状态,电动机按指令速度运行。当电动机受到外负载干扰,如外负载增加时,转速下降,速度调节器输入偏差增大,与前面产生同样的调节效果。
2)当电网电压产生波动时,如电压减小,主电路电流随之减小。这时,电动机由于转动惯量速度尚未发生改变,但电流调节器的输入偏差信号增加,输出增加,使触发器脉冲前移,SCR变流器输出电压增加,使电流恢复到指定值,从而抑制了主电路电流的变化,起到了维持主电路电流的作用。
3)当速度给定信号为一个阶跃信号时,电流调节器输入一个很大的值,但其输出值已达到整定的饱和值。此时电动机以系统控制作用的最大极限电流运行(一般为额定值的2~4倍),从而使电动机在加速过程中始终保持最大转矩和最大加速度状态,以缩短起动、制动过程。
双环调速系统具有良好的动、静态指标,其起动、制动过程快,可以最大限度地利用电动机的过载能力,使电动机运行在极限转矩的最佳过渡过程。其缺点是在低速轻载时,电枢电流出现断续现象,机械特性变软,总放大倍数降低,动态品质恶化。为此可采取电枢电流自适应调节方案,也可以增加一个电压调节器内环,组成三环系统来解决。
2.PWM调速控制系统
与晶闸管相比,功率晶体管控制电路简单,不需要附加关断电路,开关特性好。目前功率晶体管的耐压性能及制造工艺都已大大得到提高,因此,在中、小功率直流伺服系统中,PWM方式驱动系统已得到了广泛应用。
所谓脉宽调制,就是使功率晶体管工作于开关状态,开关频率保持恒定,用改变开关导通时间的方法来调整晶体管的输出,使电动机两端得到宽度随时间变化的电压脉冲。当开关在每一周期内的导通时间随时间发生连续地变化时,电动机电枢得到的电压的平均值也随时间连续地发生变化,而由于内部的续流电路和电枢电感的滤波作用,电枢上的电流则连续地改变,从而达到调节电动机转速的目的。
脉宽调制基本原理如图5-16所示,若脉冲的周期固定为T,在一个周期内高电平持续的时间(导通时间)为Ton,高电平持续的时间与脉冲周期的比值称为占空比λ,则图中直流电动机电压的平均值为(https://www.xing528.com)

式中 E为电源电压;λ为占空比, ,0<λ<1。
,0<λ<1。
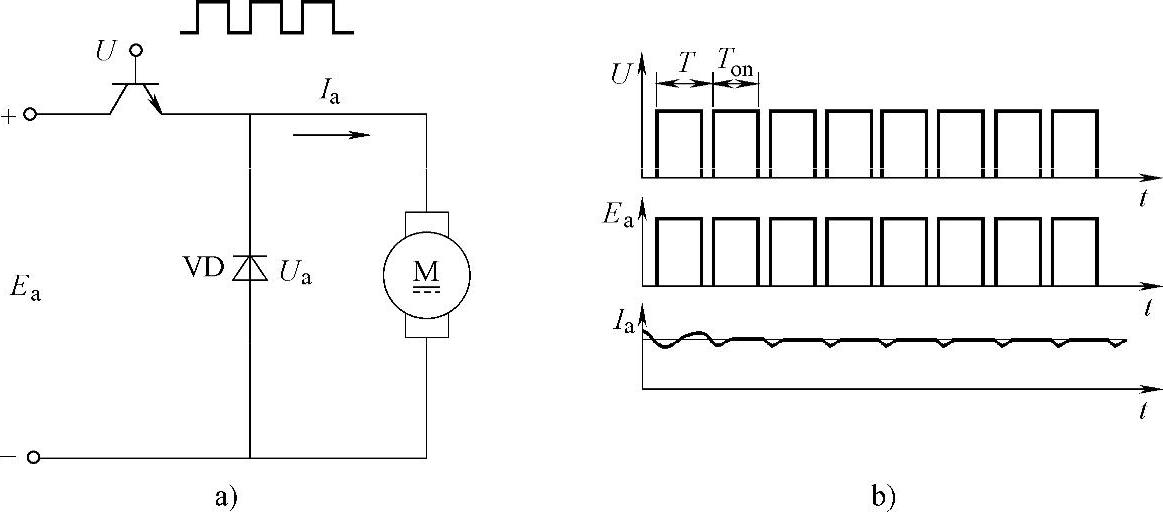
图5-16 脉宽调制原理
a)原理图 b)控制电压、电枢电压和电流的波形
当电路中开关功率晶体管关断时,由二极管VD续流,电动机便可以得到连续电流。实际的PWM系统先产生微电压脉宽调制信号,再由该脉冲信号去控制功率晶体管的导通与关断。
(1)晶体管脉宽调制系统的组成原理
图5-17所示为脉宽调制系统组成原理图。该系统由控制部分、功率晶体管放大器和全波整流器三部分组成。控制部分包括速度调节器、电流调节器、固定频率振荡器、三角波发生器、脉宽调制器和基极驱动电路。其中速度调节器和电流调节器与晶闸管调速系统相同,控制方法仍然是采用双环控制。不同部分是脉宽调制器、基极驱动电路和功率放大。
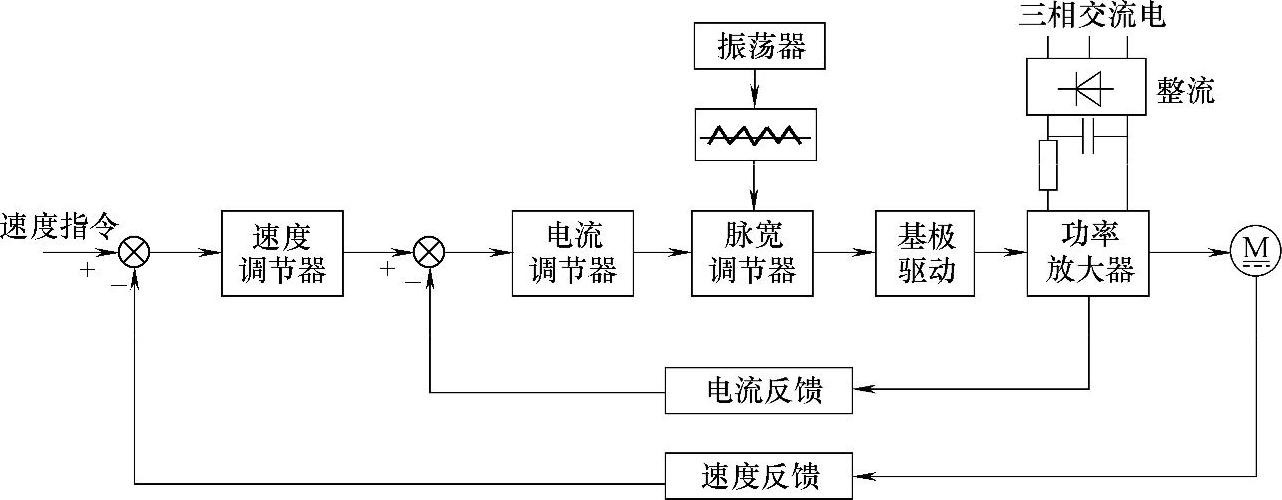
图5-17 脉宽调制系统原理图
与晶闸管调速系统相比,晶体管脉宽调制系统有以下特点:
1)频带宽:晶体管的结电容小,截止频率高,比晶闸管高一个数量级,因此PWM系统的开关工作频率一般为2kHz,有的高达5kHz,使电流的脉动频率远远超过机械系统的固有频率,避免机械系统由于机电耦合产生共振。
另外,晶闸管调速系统开关频率依赖于电源的供电频率,无法提高系统的开关工作频率。因此系统的响应速度受到限制。而PWM系统在与小惯量电动机相匹配时,可充分发挥系统的性能,获得很宽的频带,使整体系统的响应速度增高,能实现极快的定位速度和很高的定位精度,适合于起动频繁的工作场合。
2)电流脉动小:电动机为感性负载,电路的电感值与频率成正比,因而电流的脉动幅值随开关频率的升高而降低。PWM系统的电流脉动系数接近于1,电动机内部发热小,输出转矩平稳,有利于电动机低速运行。
3)电源功率因数高:在晶闸管调速系统中,随开关导通角的变化,电源电流发生畸变,在工作过程中,电流为非正弦波,从而降低了功率因数,且给电网造成污染。这种情况,导通角越小越严重。而PWM系统的直流电源,相当于晶闸管导通角最大时的工作状态,功率因数可达90%。
4)动态硬度好:PWM系统的频带宽,校正伺服系统负载瞬时扰动的能力强,提高了系统的动态硬度,且具有良好的线性,尤其是接近零点处的线性好。
(2)脉宽调制器
脉宽调制器的作用是将电压量转换成可由控制信号调节的矩形脉冲,即为功率晶体管的基极提供一个宽度可由速度指令信号调节且与之成比例的脉宽电压。在PWM调速系统中,电压量为电流调节器输出的直流电压量,该电压量是由数控装置插补器输出的速度指令转化而来。经过脉宽调制器变为周期固定、脉宽可变的脉冲信号,脉冲宽度的变化随着速度指令而变化。由于脉冲周期不变,脉冲宽度的改变将使脉冲平均电压改变。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。