



为了提高步进电动机的性能和结构工艺性,步进电动机有许多的结构类型,主要是根据相数、产生转矩的原理、输出转矩的大小和结构进行分类。
1.根据相数分类
我国数控机床中采用的步进电动机有三、四、五、六相等几种,因为相数越多,步距角越小,而且还可采用多相通电,提高步进电动机的输出转矩。根据前面分析,步进电动机的通电方式一般采用m相m拍、双m拍和m相2m拍通电方式,在m相m拍和m相2m拍通电方式中,除采用一/二相通电转换外,还可采用二/三相转换通电,如五相步进电动机,各相用A、B、C、D、E表示,其五相十拍的二/三相转换方式为AB→ABC→BC→BCD→CD→CDE→DE→DEA→EA→EAB。
2.根据产生转矩的原理分类
步进电动机是采用定子与转子间电磁吸合原理工作,根据磁场建立方式,主要可分为反应式和永磁反应式(也称混合式)两类。
反应式步进电动机的定子有多相磁极,其上有励磁绕组,而转子无绕组,用软磁材料制成,由被励磁的定子绕组产生反应力矩实现步进运行。永磁反应式步进电动机的定子结构与反应式相似,但转子用永磁材料制成或有励磁绕组、由电磁转矩实现步进运行。这样可提高电动机的输出转矩,减少定子绕组的电流。我国的永磁反应式步进电动机多为五相,具有输出转矩大、步距角小、额定电流小等优点,缺点是转子容易失磁,导致电磁转矩下降。
3.根据输出转矩的大小分类(https://www.xing528.com)
根据输出转矩的大小可将步进电动机分为两类:伺服步进电动机和功率步进电动机。伺服步进电动机又称为快速步进电动机,输出转矩在几十到数百mN·m,只能带动小负载,加上液压转矩放大器可驱动工作台。功率步进电动机输出力矩在5~50N·m以上,能直接驱动工作台。
4.根据结构分类
步进电动机可制成轴向分相式和径向分相式,轴向分相式又称多段式,径向分相式又称为单段式。前面介绍的反应式步进电动机是按径向分相的,也称为单段反应式步进电动机,它是目前步进电动机中使用最多的一种结构形式。除此之外,还有一种反应式步进电动机是按轴向分相的,这种步进电动机也称为多段反应式步进电动机。多段反应式步进电动机沿着它的轴向长度分成磁性能上独立的几段,每一段都用一组绕组励磁,形成一相,因此,三相电动机有三段。电动机的每一段都有一个定子,它们固定在外壳上。转子制成一体,由电动机两端的轴承支承。每段定子上都有许多磁极,绕组绕在这些磁极上。沿电动机的轴向长度看,转子齿与每段定子齿之间有不同的相对位置。如图5-6所示,设一三相多段反应式步进电动机的三相分别为A、B、C,则A段里的定子齿和转子齿是对齐的,B段和C段里的定子齿和转子齿则不对齐,一般错开齿距的1/m(m为定子相数),齿距为360°/转子齿数。若从A相通电变化到B相通电,则使B段里的定子齿和转子齿对齐,转子转动一步。使B相断开,C相通电,则电动机以同一方向再走一步。再使A相单独通电,则再走一步,A段里的定子齿和转子齿再一次完全对齐。不断按顺序改变通电状态,电动机就可连续旋转。若通电方式为A→B→C→A→……,则通电状态的三次变化使转子转动一个齿距;若通电方式为A→AB→B→BC→C→CA→A……,则通电状态的六次变化使转子转动一个齿距。
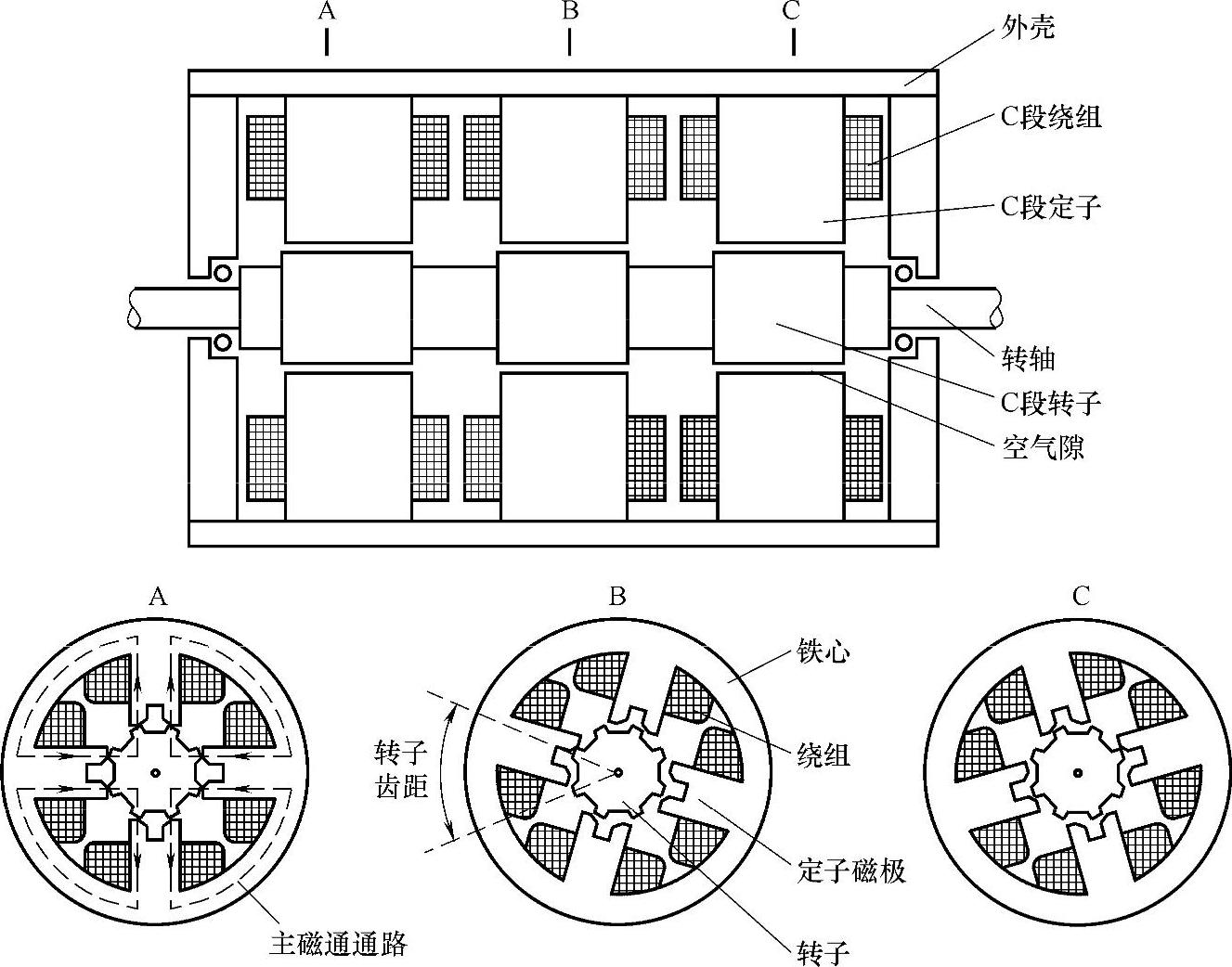
图5-6 三段反应式步进电动机结构示意图
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。