



在数控机床的主轴控制中,为了获得高转矩,通常都会采用矢量控制。对于伺服电动机控制来说,从异步型交流伺服电动机为代表的矢量控制与交流异步电动机的变频矢量控制相同,已经在上节中进行介绍,不再赘述。这里主要介绍同步型交流伺服电动机(以永磁式交流伺服电动机为代表)的矢量控制。
永磁式交流同步电动机的磁场定向关系示意图如图4-19所示,永磁转子的磁通Φr与定子磁通向量Φs的合成向量为Φ,Φr为常数,与Φs保持同步旋转,Φr和Φs正交时产生最大转矩。由于电流和磁通是同方向的,去掉绕组的有效匝数因素,可求出定子电流矢量的幅值Is,定子电流矢量的方向与Φs同向。转子的位置角θ可由装在转子轴上的检测装置测出。Is、θ和定子三相电流ia、ib、ic的关系可由下式求出
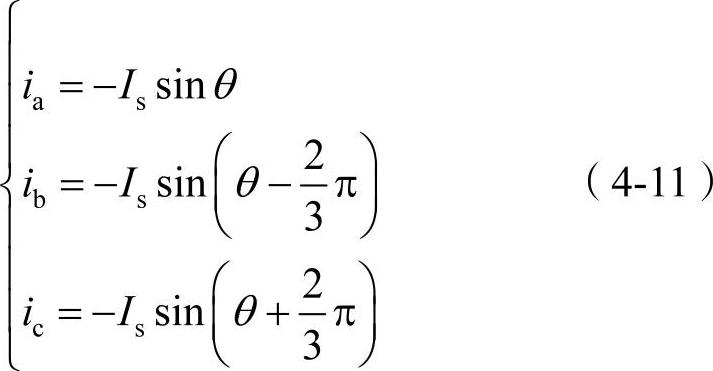
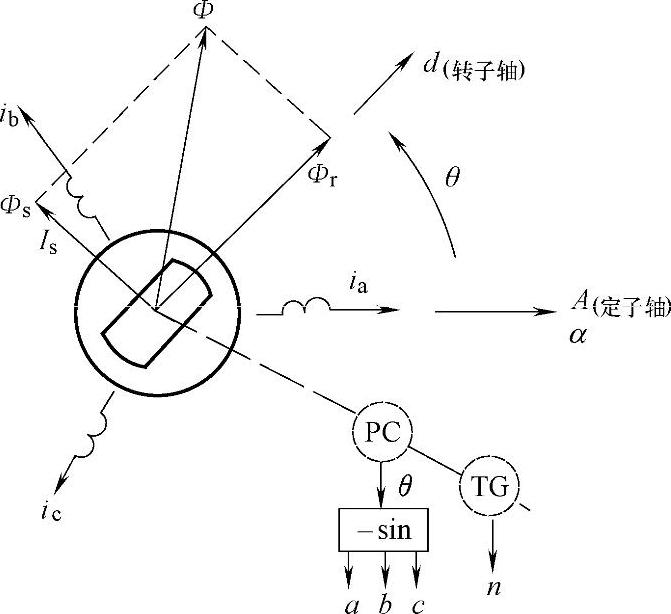
图4-19 永磁式交流电动机磁场定向关系示意图
相差120°相位角的定子电流的正弦函数值a、b、c可直接由检测装置测得的θ角算出

定子电流的幅值Is可由速度给定值Un*和速度反馈值Un之差由速度调节器求得,再用式(4-11)由Is和a、b、c计算出ia、ib、ic,用以控制永磁式交流电动机的转矩和速度。(https://www.xing528.com)
图4-20所示为永磁式交流伺服电动机速度、电流双环SPWM控制系统的原理图,速度给定值Un*与由测速发电动机检测的实际速度值Un之差是速度调节器的输入信号,速度调节器的输出便是与转矩成正比的定子电流幅值Is*,这个电流幅值与正弦函数值a、c相乘,得到三相定子电流给定值中的两相ia*和ic*。ia*、ic*与A、C相的实测电流ia、ic相减,并经电流调节器后,得到Ua*、Uc*正弦信号,由于定子三相电流之和为零,即ia+ib+ic=0,所以Ub*可由Ua*、Uc*
求得。Ua*、Ub*、Uc*经三角波调制后作为逆变器的基极驱动信号。
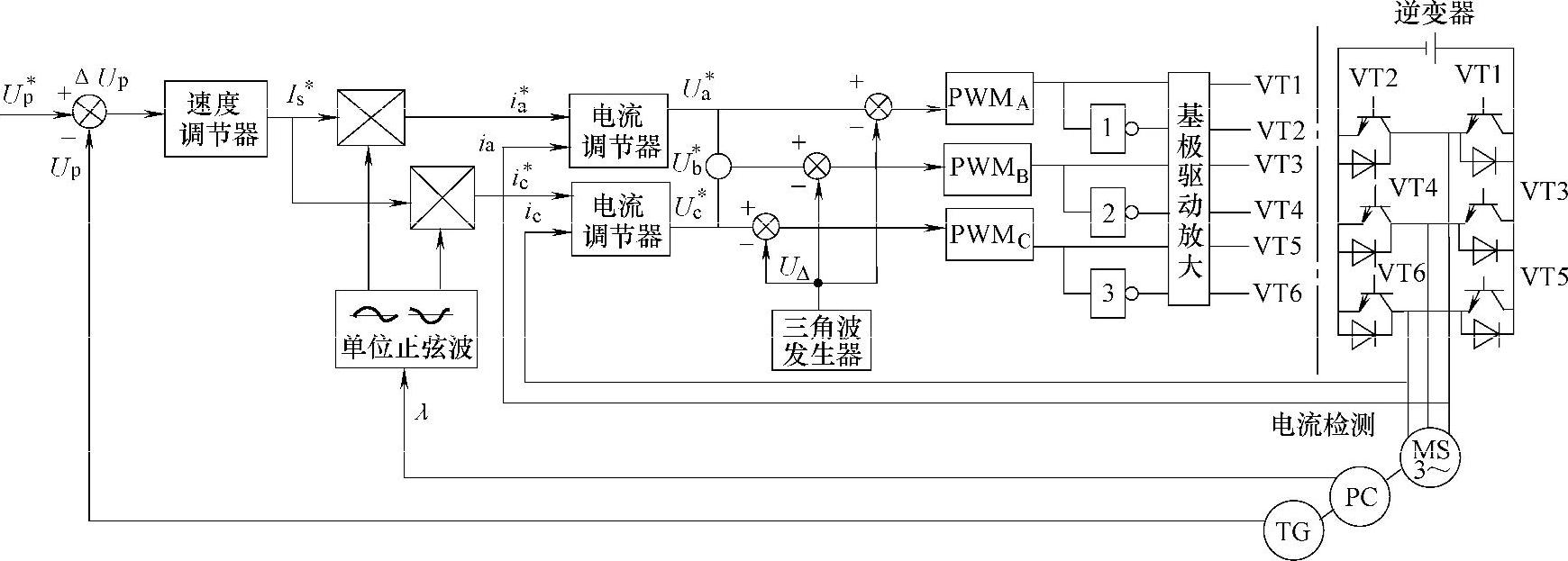
图4-20 永磁式交流伺服电动机速度、电流双环SPWM控制系统原理图
电动机启动时,系统得到一个阶跃信号Un*,由于此时的Un为零,因而使速度调节器处于饱和状态,输出饱和电流Is*,在电动机转速为零时,仍然有最大转矩,这时θ=0,由式(4-12)可知:a=0、c=0.866,由式(4-11)可计算出ia*=0、ic*=0.866Is*,在这个电流作用下产生Ua*、Ub*、Uc*,使电动机启动,随着电动机的转动,θ值不断变化,使ia、ic产生正弦波。由于θ值是检测出的转子角度值,因此,ia、ic是跟踪转子转角的正弦波。正弦波上各点的值可由硬件给出,也可由计算机算出。
速度环的输出是定子电流的幅值Is*,稳态时若速度给定值Un*不变,Is*也不变,这样就与直流电动机速度环的控制方法完全一样了。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。