



1.异步电动机稳态模型
根据电动机学原理,在下述三个假定条件下(即忽略空间和时间谐波、忽略磁饱和、忽略铁损),异步电动机的稳态模型可以用T形等效电路表示,如图4-4a所示。
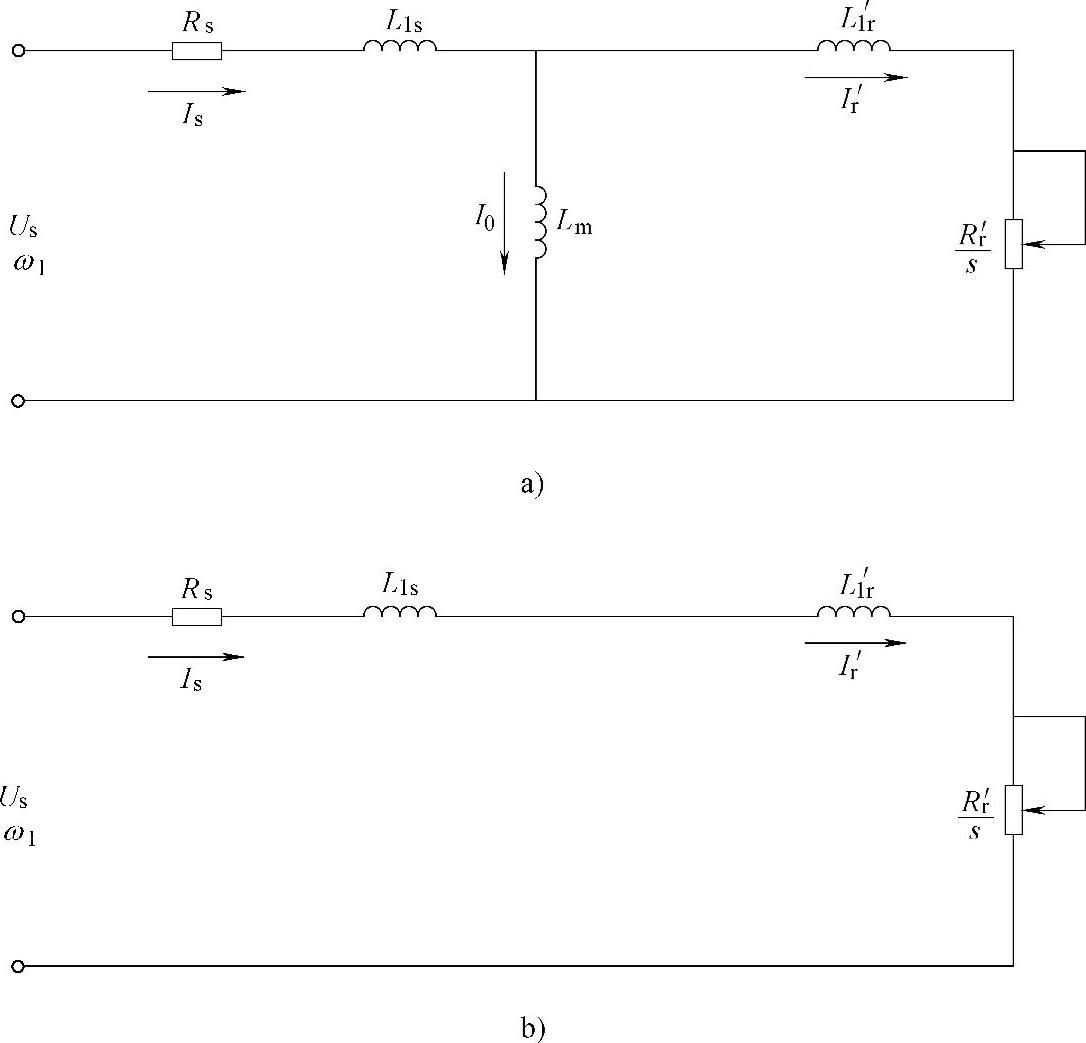
图4-4 异步电动机简化等效电路
a)异步电动机T形等效电路 b)异步电动机简化等效电路
图4-4中的各参数定义如下:
Rs、Rr′——定子每相电阻和折合到定子侧的转子每相电阻;
L1s、L1r′——定子每相漏感和折合到定子侧的转子每相漏感抗;
Lm——定子每相绕组产生气隙主磁通的等效电感,即励磁电感;
Us、ω1——定子相电压和供电角频率;
Is、Ir′——定子相电流和折合到定子侧的转子相电流。
根据电动机原理,忽略励磁电流,则得到如图4-4b所示的简化等效电路,并推导出电流公式和每极气隙磁通。
其中电流公式可表示为

感应电动机的每极气隙磁通为
 (https://www.xing528.com)
(https://www.xing528.com)
式中 Eg为气隙磁通在定子每相中感应电动势的有效值;f1为定子频率;Ns为定子每相绕组串联匝数;KNs为定子基波绕组系数。忽略定子电阻和漏磁感抗压降,则认为定子相电压Us=Eg。
2.转速开环的异步电动机变压变频调速
为了达到良好的变频控制效果,常采用电压-频率协调控制(即V/f控制),并分为基频(额定频率)以下和基频以上两种情况。
(1)基频以下调速
以便充分利用电动机铁心,发挥电动机产生转矩的能力,在基频以下采用恒磁通控制方式,要保持Φm不变,当频率f1从额定值fIN向下调节时,必须同时降低Eg,即采用电动势频率比为恒值的控制方式。然而,绕组中的感应电动势是难以直接控制的,当电动势值较高时,可以忽略定子电阻和漏磁感抗压降,而认为定子相电压Us≈Eg,则可以从式(4-3)得出如下:

式(4-4)是恒压频比的控制方式,其控制特性如图4-5所示。低频时,Us和Eg都较小,定子电阻和漏磁感抗压降所占的分量相对较大,可以人为地抬高定子相电压Us,以便补偿定子压降,称作低频补偿或转矩提升。
(2)基频以上调速
在基频以上调速时,频率从fIN向上升高,但定子电压Us却不可能超过额定电压UsN,只能保持Us=UsN不变,这将使磁通与频率成反比地下降,使得电动机工作在弱磁状态。
把基频以下和基频以上两种情况的控制特性画在一起,如图4-6所示。如果电动机在不同转速时所带的负载都能使电流达到额定值,即都能在允许温升下长期运行,则转矩基本上随磁通变化而变化。按照电力拖动原理,在基频以下,磁通恒定,转矩也恒定,属于“恒转矩调速”性质,而在基频以上,转速升高时磁通恒减小,转矩也随着降低,基本上属于“恒功率调速”。

图4-5 恒压频比控制特性
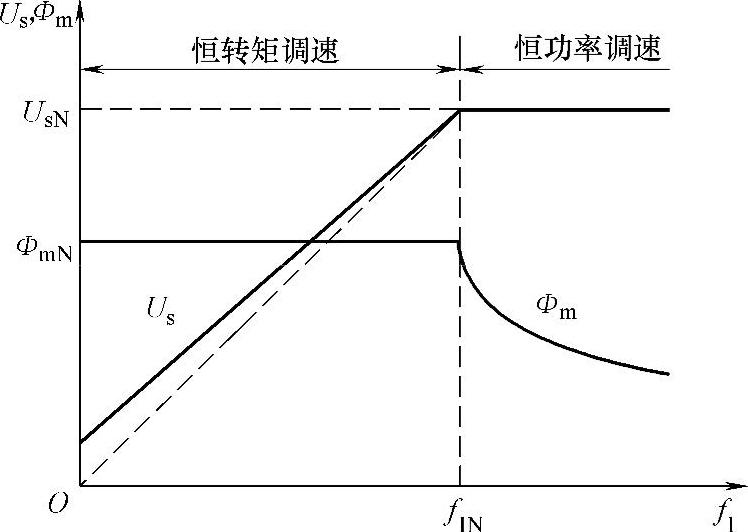
图4-6 感应电动机变压变频调速的控制特性
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。