



2.1 基本电压空间矢量
图1示出电动游览车的逆变器主电路。规定当上桥臂的一个开关管导通时,开关状态为1。此时,相应的下桥臂开关管关断;反之亦然,开关状态为0。3个桥臂只有1或0的状态,因此由3个桥臂的开关状态a,b,c可形成000~111的8种开关模式。其中,000和111的开关模式为零状态,其他6种开关模式可提供有效的输出电压。空间矢量的基本思想就是用这8种开关模式的组合来近似电机的定子电压。
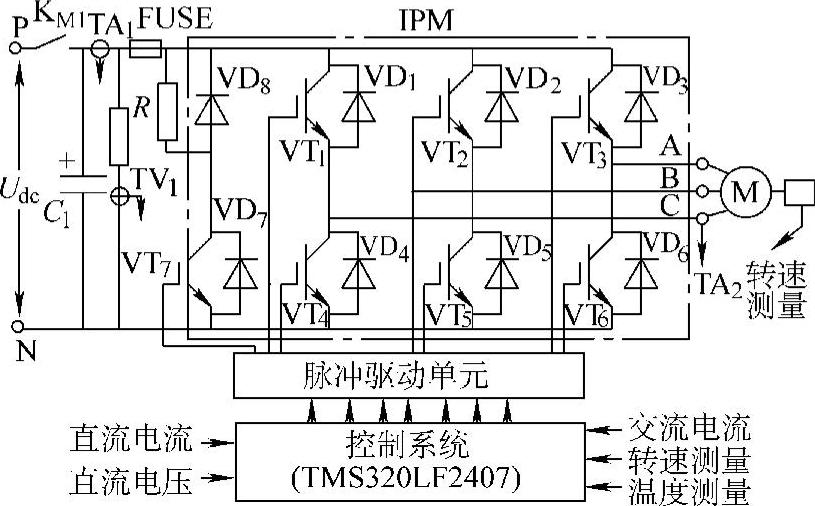
图1 逆变器主电路
由上述假定可推导出三相逆变器输出的线电压矢量[UAB,UBC,UCA]T与开关状态矢量[a,b,c]T的关系为:

式中 Udc——直流输入电压。
三相逆变器输出的相电压矢量[UAB,UBC,UCA]T与开关状态矢量[a,b,c]T的关系为

将开关状态矢量a,b,c的8种开关组合代入式(2),可求出UA,UB,UC在8种状态下各自对应的电压,然后把在每种开关模式下的相电压值代入u=uA+uB+uC就可依次求出8种开关模式下的相电压矢量和相位角。图2示出这8个基本电压矢量的位置。
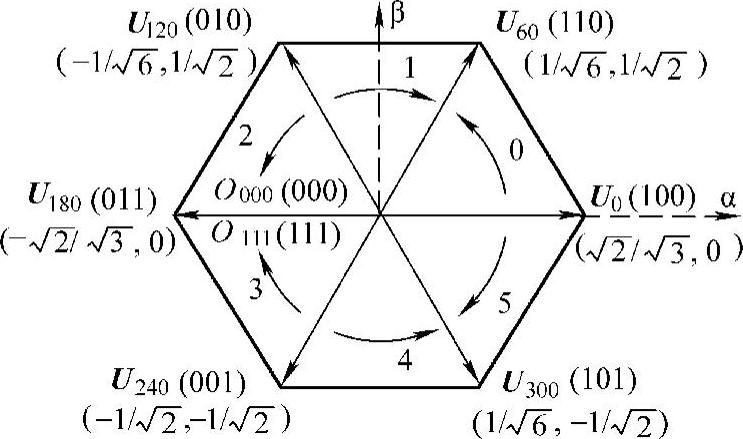
图2 基本电压矢量的位置
上述相电压值都指三相A,B,C平面坐标系中的值,为了计算方便,在DSP程序计算中需将其转换到0,α,β平面坐标系中。如果选择在两个坐标系中,电机的总功率将保持不变,作为两个坐标系的转换原则,则采用下述转换方式:

根据式(3)可将前面算出的各开关模式下对应的相电压转换至0,α,β坐标系中的分量。各基本矢量转换至0,α,β坐标系后的对应分量如图2所示。
2.2 磁链轨迹的控制
有了含6个有效矢量和2个零矢量的这8个基本电压空间矢量后,就可根据这些基本矢量合成尽可能多的电压矢量。以形成一个近似圆形的磁场。图3示出一种电压空间矢量的线性时间组合方法。输出的参考相电压矢量Uout的幅值代表相电压的幅值。其旋转角速度就是输出正弦电压的角频率。Uout可由相邻的两个基本电压矢量Ux和Ux±60的线性时间组合来合成,如:

在每一个TPWM期间都改变相邻基本矢量的作用时间,并保证所合成的电压空间矢量的幅值都相等,因此当TPWM取足够小时,电压矢量的轨迹是一个近似圆形的正多边形TPWM。(https://www.xing528.com)
在合成电压空间矢量时,由于对非零矢量Ux和Ux±60的选择不同,以及零矢量的分割方法也不同,因而会产生多种电压空间矢量的PWM波。目前,应用较为广泛的是七段式电压空间矢量PWM波形,其Ux和Ux±60的选择顺序如图2所示。
2.3 T1,T2和T0的计算
根据式(4),电压空间矢量Uout可由Ux和Ux±60的线性时间组合来得到,则由图3,且根据三角正弦定理有:


由式(5)和式(6)可解得:
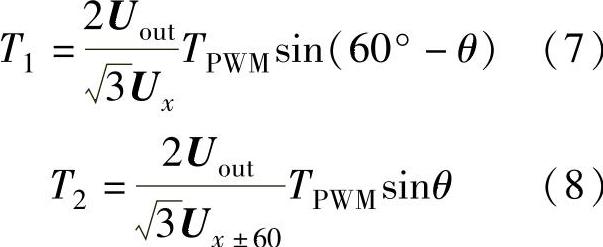
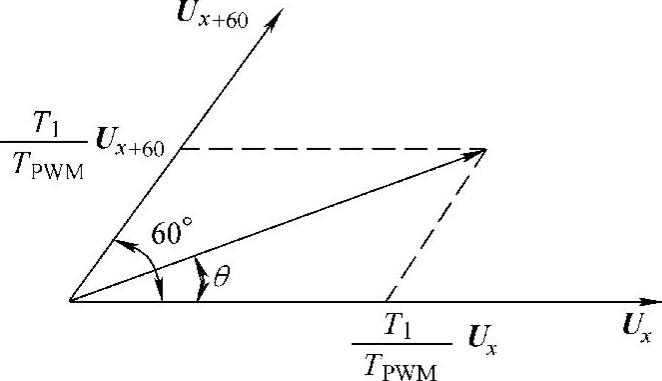
图3 电压空间矢量的线性组合
式(7)和式(8)中,TPWM可事先选定;Uout可由U/f曲线确定;θ可由电压角频率ω和nTPWM的乘积确定。因此,当Ux和Ux±60确定后,就可根据式(7)和式(8)确定T1和T2。最后再根据确定的扇区,选出Ux和Ux±60即可。
为了使每次状态转换时,开关管的开关次数最少,需要在TPWM期间插入零矢量的作用时间,使TPWM=T1+T2+T0。插入零矢量不是集中的加入,而是将零矢量平均分成几份,多点的插入到磁链轨迹中,这不但可使磁链的运动速度平滑,而且还可减少电机的转矩脉动。
2.4 扇区号的确定
将图2划分成6个区域,成为扇区。每个区域的扇区号已在图中标出。确定扇区号是非常重要的,因为只有知道Uout位于哪个扇区,才知道选用哪一对相邻的基本电压空间矢量合成Uout。下面介绍一种确定扇区号的方法,即当Uout以0,α,β坐标系的分量形式Uoutα,Uoutβ给出时,先计算Uref1=Uβ,Uref2= ,
, ,再用N=4sign(Uref3)+2sign(Uref2)V+sign(Uref1)计算N值。式中sign(x)为符号函数,当x>0时,则sign(x)=1时,当x<0时,则sign(x)=0。然后,根据N的值,查表1即可确定扇区了。
,再用N=4sign(Uref3)+2sign(Uref2)V+sign(Uref1)计算N值。式中sign(x)为符号函数,当x>0时,则sign(x)=1时,当x<0时,则sign(x)=0。然后,根据N的值,查表1即可确定扇区了。
表1 确定扇区表

在每一个PWM周期中,各扇区中Ux和Ux±60的切换换顺序如图2所示。图4示出七段式电压空间矢量PWM波的零矢量和非零矢量在0扇区的施加顺序及作用时间。
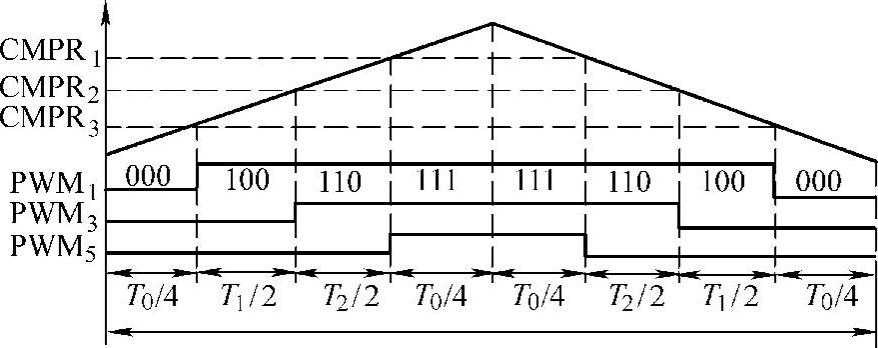
图4 0扇区电压空间矢量PWM波形
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。