



【摘要】:下面介绍一个具体SVPWM控制系统,属于间接控制,不采用电流滞环,现将此种控制方式叙述于下。图5-16 逆变状态下,整流器向电网回馈有功功率图5-17 SVPWM三电平整流器的控制电路控制过程如下:外环电压|Ud1|+|Ud2|=2Ud和给定的电压2Ud*比较,通过PI调节器给出内环电流给定信号id*,以保证在稳态时实际直流电压和给定电压相等。id*和经过矢量旋转坐标变换获得的d轴电流id相比较,经过PI调节器,获得d轴电压的给定值ud。
下面介绍一个具体SVPWM控制系统,属于间接控制,不采用电流滞环,现将此种控制方式叙述于下。
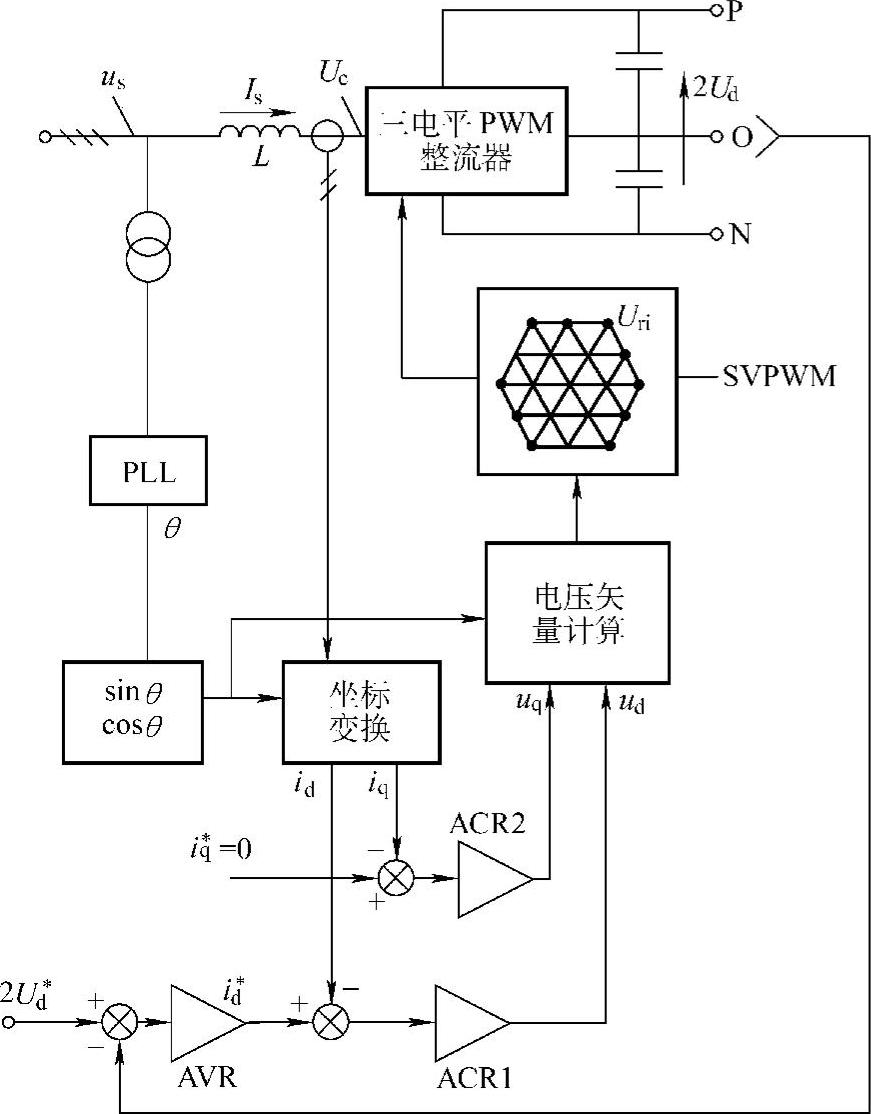
由于三相可控整流器各变量的动态过程变化速度是不一样的,其中交流侧电流变化快,直流电压波动慢。针对这一特点,设计了整流器的控制系统,如图5-17所示,图中的控制结构分为内环和外环两种方式,内环控制交流电流,外环控制直流电压,PLL锁相环用来获得电网电压的角度,坐标变换为ABC系/dq系。
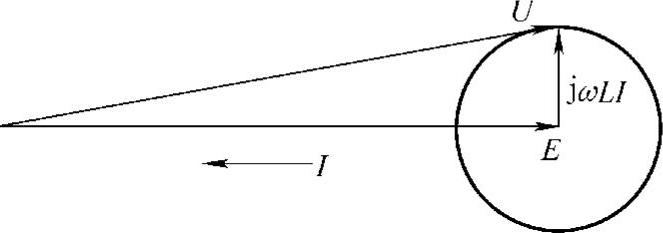
图5-16 逆变状态下,整流器向电网回馈有功功率
 (https://www.xing528.com)
(https://www.xing528.com)
图5-17 SVPWM三电平整流器的控制电路
控制过程如下:外环电压|Ud1|+|Ud2|=2Ud(两个滤波电容电压)和给定的电压2Ud*比较,通过PI调节器给出内环电流给定信号id*,以保证在稳态时实际直流电压和给定电压相等。id*和经过矢量旋转坐标变换获得的d轴电流id相比较,经过PI调节器,获得d轴电压的给定值ud。同样,为了保证电网电压和电流同相,将q轴的电流参考值iq*给定为0,并和经过坐标变换后得到的id相比较,通过PI调节器,得到q轴电压给定值uq。对两个电压给定值经过坐标变换后,通过电压空间矢量PWM算法,得出驱动功率开关器件的PWM脉冲信号。电流内环通过控制开关器件的动作,实现实际dq轴电流id、iq对给定电流id*和iq*的跟踪,要求在保证稳定性和一定精度的同时具有快速响应和鲁棒性。
在系统稳态运行情况下,可以保证三相整流器的直流电容电压稳定在给定电压的附近。同时,q轴的电流在零附近。这样就同时实现了电网功率因数为1和直流侧电容电压稳定的功能,同时也改善了输入谐波。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。