



整流器控制的主要目标是功率因数为1和稳定的直流电压,当然还有改善波形。常采用的控制算法可分为两大类:一类是间接控制,通过三相整流器电流环、电压环运算获得空间参考电压矢量,然后通过整流器空间电压矢量的合成,并定时输出开关信号,以达到控制的目的。一类是直接控制,将滞环控制与SVPWM控制相结合,通过整流器空间矢量的实时切换,使电流误差被限制在给定滞环内,从而获得电流高品质控制。
三相三电平的控制SVPWM算法的总体框图如图5-12所示,图中,给定的直流母线电压信号Ud*与实际检测的直流母线电压信号Ud相比较,并将其差值送入PI调节器,得到直流母线电流信号Id,该信号送入相应的控制算法模块,与实际检测的电源电压us及电流矢量is进行运算,输出电压uK,得出整流电路的12个电力电子器件的开关状态,控制整流器工作。
电路由逆变状态进入整流状态过程与上述类似。
下面叙述两类电流控制模块的算法。
1.间接电流控制算法
首先确定参考矢量。在整流状态下,is*与us同方向,因此幅值与Id成正比
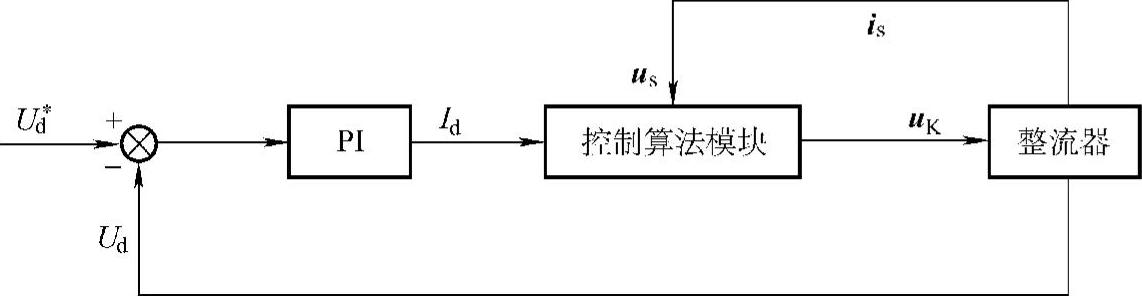
图5-12 三电平整流器电流控制算法总体框图
is*=kId (5-8)
根据整流电路,整流器输出合成参考矢量为

式中 us——电网电压;
uR、uL——整流电路电阻Rs和电感Ls压降。
由此可得间接电流控制算法框图如图5-13所示。

图5-13 间接电流控制算法框图
矢量选择模块的功能是根据参考电压矢量ur和载波周期确定各空间矢量电压uK的作用顺序和作用时间,由于ur是计算所得,故控制效果较差。
2.直接电流控制算法
若不计电阻,整流电路方程为
 (https://www.xing528.com)
(https://www.xing528.com)
ur为三相整流器交流侧输出电压。由式(5-8)计算得is*,代入式(5-10)可得参考电压ur为

而整流器交流侧实际输出值

式(5-11)和式(5-12)相减,得

则
由式(5-13)和式(5-14),对于给定的具有零误差电流响应的参考电压ur*,可以选择合适的三相整流器空间电压矢量uK,(k=0,1,2,…6),以控制uK的变化率,进而控制误差电流矢量的变化率dis/dt和控制误差电流矢量Δis。
直接电流控制算法框图如图5-14所示,控制策略是将电流指令is*与输入的反馈电流ia、ib、ic通过定环宽的磁滞比较单元,由空间电压矢量选择逻辑输出一个合适的uK,(K=0,…2,…6)从而使三相整流器电流跟踪指令电流。
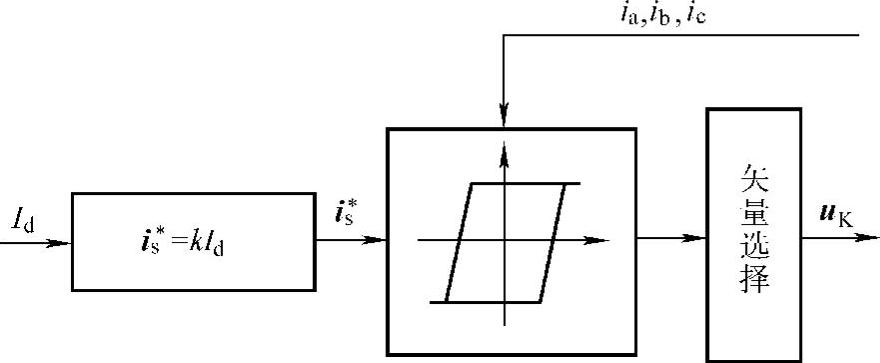
图5-14 直接电流控制算法框图
3.能量交换圆图[3]
在PWM整流器能量交换过程中,圆图表示了整流器输出电压U与输出电流I的关系,通过圆图可以直观地分析整流器的电压输出范围、电流输出范围和功率因数之间的关系。
设整流器的最大输出电流I保持不变,则网侧输出电压矢量的终点应落在以电网电压E为圆心,LI为半径的圆周及圆盘内,如图5-15a所示。
一般我们希望整流状态的网侧功率因数为1,则E和I同向,U的终点应落在过E终点的E的垂线上,如图5-15b所示。该垂线左侧的区域,整流器从电网吸收感性无功功率;右侧的区域,整流器向电网发出感性无功功率。
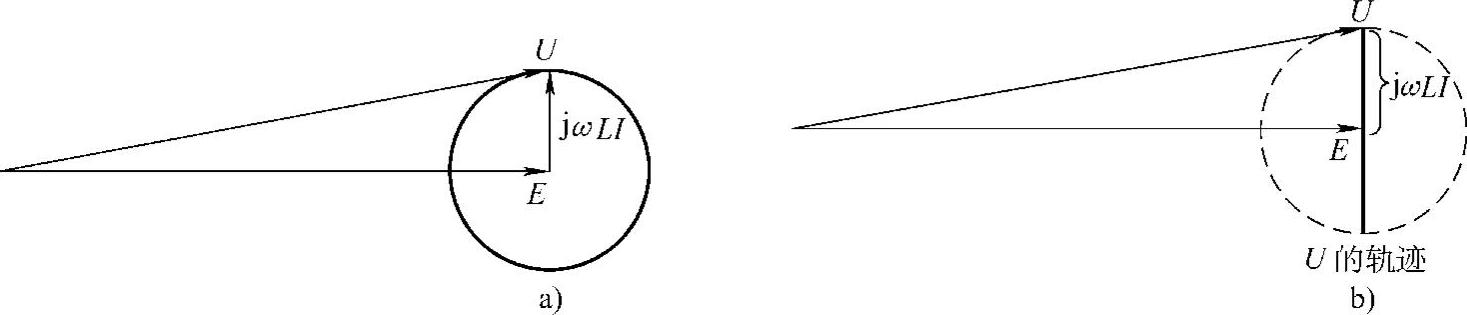
图5-15 能量交换圆图和单位功率因数工作区域示意图
a)能量回馈整流器工作区域圆图 b)单位功率因数工作区域示意图
整流器进入逆变状态,E、I反向,整流器向电网回馈有功功率,并为单位功率因数,如图5-16所示。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。