



图5-6所示为常用的采用优化矢量表的直接转矩控制系统框图,可见本方案类似于两电平优化矢量表直接转矩控制,只是优化矢量表的内容不同,由两电平变为三电平。
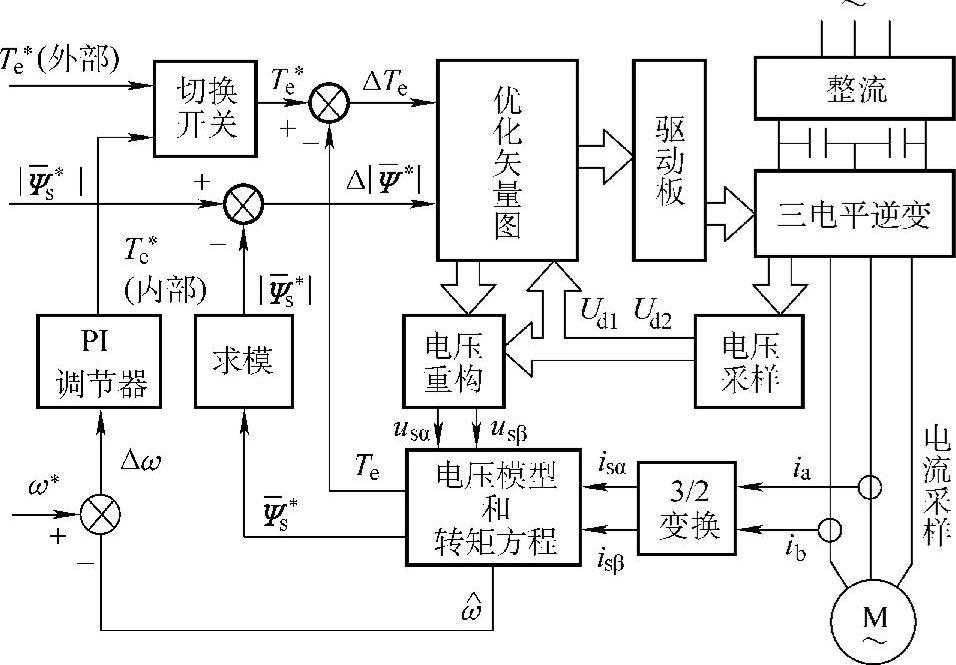
图5-6 采用优化矢量表的直接转矩控制系统框图
系统属于无速度传感器调速系统,速度由电压模块、转矩方程模块计算生成。由于电动机采用星形联结方式,如上所述,控制系统只需检测系统的两相电流ia和ib,第三相电流可以由公式ic=-ia-ib求出。经过电流、电压采样,获得电流ia、ib和直流电压Ud1、Ud2,ia和ib经3/2变换得到isα、isβ。Ud1、Ud2参与电压重构得到usα、usβ。isα、isβ,usα、usβ同时输入定子磁链和电磁转矩观测器完成定子磁链和电磁转矩的观测,获得定子磁链矢量ψs的幅值|ψs|与位置角θψ以及电磁转矩Te,电压重构由下式求得:

式中 Sa、Sb、Sc——三相开关函数,从优化矢量表给出;(https://www.xing528.com)
Ud——直流电压。
有了isα、isβ和usα、usβ代入电压磁链和转矩公式[式(3-19)~式(3-22)],便得到实测值Te、 、ψrα、ψrβ。Te与给定值Te*(外部)比较,得到转矩差值ΔTe,
、ψrα、ψrβ。Te与给定值Te*(外部)比较,得到转矩差值ΔTe, 取绝对值,|
取绝对值,| |与给定值|
|与给定值| |比较,得出磁链Δ|
|比较,得出磁链Δ| |。ΔTe和Δ|
|。ΔTe和Δ| |输入优化矢量表环节(也可经过滞环Bang-Bang控制),便可获得应有的开关状态Sa、Sb、Sc,通过驱动单元,使逆变器进行直接转矩控制运作。
|输入优化矢量表环节(也可经过滞环Bang-Bang控制),便可获得应有的开关状态Sa、Sb、Sc,通过驱动单元,使逆变器进行直接转矩控制运作。
系统有外部和内部两种运行方式,用切换开关切换。上面所述为外部方式,若用内部控制方式,三相电流经3/2变换得出,经电压模型和转矩方程计算,得到转速 ,与给定值ω*比较,得出Δω,再由PI调节器得到给定转矩Te*,送入优化矢量表环节。
,与给定值ω*比较,得出Δω,再由PI调节器得到给定转矩Te*,送入优化矢量表环节。
优化矢量表环节的功能为根据转矩和磁链误差确定要发的矢量,并根据中点电压的状态选择合成顺序,确定PWM方案,最后显示PWM波形。
优化矢量表的制作其思路与方法和两电平相同。由于磁链的调节是按该时刻转矩的大小、定子磁链的大小及定子磁链的空间位置来选取电压矢量和其作用时间,我们便可以将每一时刻、不同情况将选择的电压矢量做成电压矢量选择表。因这里是三电平逆变器,电压矢量是三电平的基本矢量,对应该时刻定子磁链的空间位置可能有几个矢量(包括大、中、小矢量)可供选择,就要按优化原则确定出优化矢量,然后制成全程优化矢量表。优化的原则主要是防止电压过大跳变和保持中点电压的平衡。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。