



异步电动机矢量控制调速常用的是转子磁链定向控制,其工作原理已于第3章讲述,主要是将三相电压、电流交流量通过旋转坐标系变换变成直流量进行控制,从而使三相异步电动机获得与直流电动机相同的控制特性,具有良好的动稳态性能。
目前高压电动机变频调速用的三电平逆变器常用二极管钳位式,其结构如图5-1所示,其优点已在上一章讲述。图5-2所示为一个三电平逆变器异步电动机转子磁链定向调速系统矢量控制框图,属于双闭环调节方式;和第3章图3-4不同之处是:
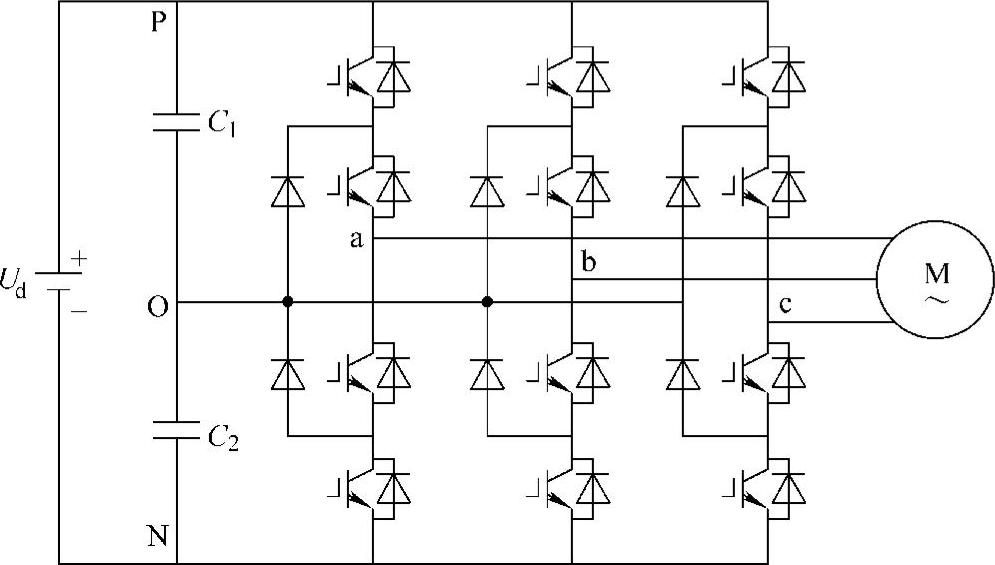
图5-1 二极管钳位式三电平逆变器
1)两电平矢量控制系统为无传感器系统,转速用数学模型计算出来;三电平控制系统则为有传感器系统,转速是用测速发电机测出(也可用光电码盘)。
2)3/2坐标转换只用电流,未用电压;
3)用电流型磁链观测器取代转子磁链观测器,因此简化线路。
必须说明的是,图5-2系统不是唯一的,可以有多种系统结构,供读者选择或自行设计。
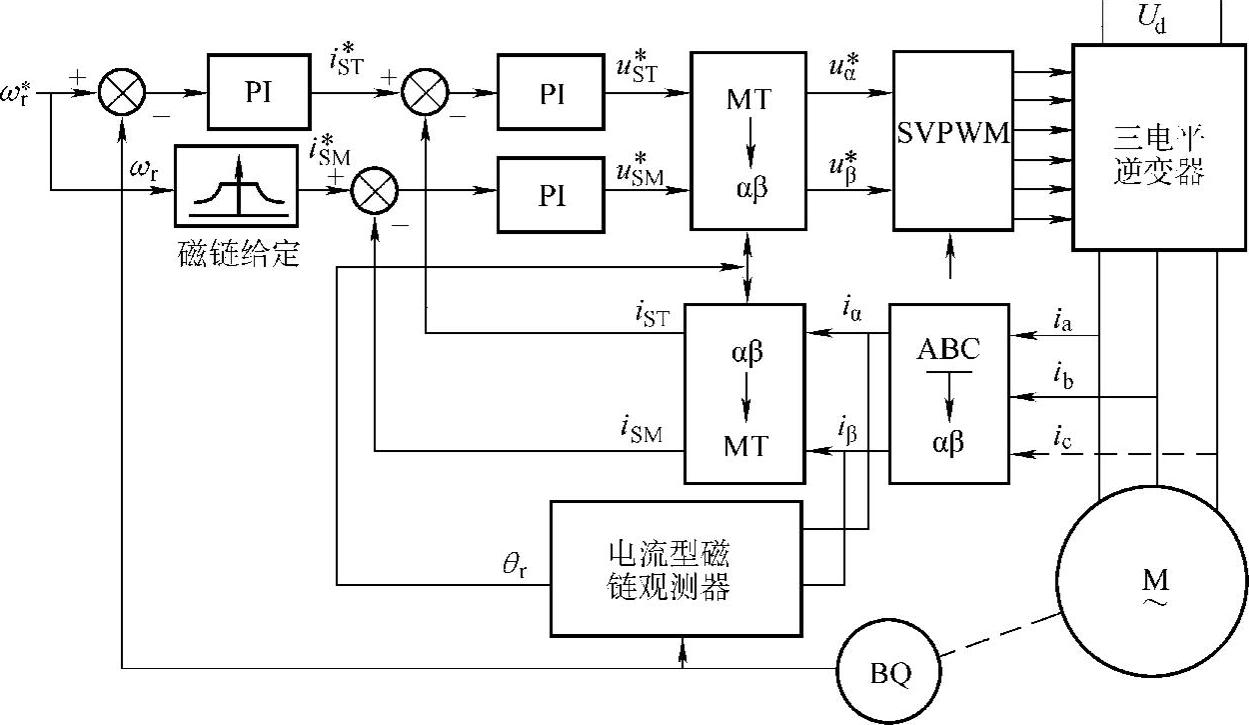
图5-2 转子磁链定向调速系统框图
整个系统由磁链闭环和转速闭环两个部分所组成,SVPWM为三电平空间矢量调制环节。系统中有3次坐标变换:一次为三相坐标系变两相坐标系(ABC/αβ),将三相电流变换为iα和iβ,变换的目的是不计入零序分量。这里只取两相ia、ib,因为三相ia+ib+ic=0,ic可以计算出来,简化了硬件。接下来的一次坐标变换为αβ/MT变换(转子磁场定向),将交流量iα和iβ变换成直流量iSM、iST;另一次坐标变换为反变换,将MT坐标系变换为αβ坐标系,将直流量转为交流量作为给定控制控制电压uα*和uβ*(前面有电流电压转换器),进入SVP-WM环节,按第2章图2-25所示算法进行计算,得到参考电压矢量u(uref)。
磁链观测是一个电流型观测器,其用途是提供一个转子磁链角θr,供构成sinθr、cosθr之用,其数学模型如下式:(https://www.xing528.com)
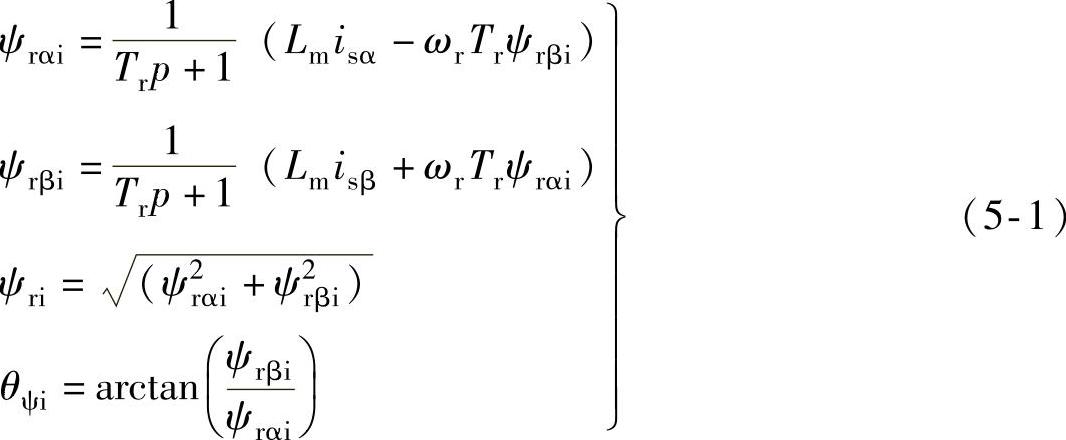
式中 Lm——定转子互感;
Tr——转子时间常数;
ωr——转子转速;
ψrαi、ψrβi——磁链观测器观测出的转子磁链αβ分量;
ψri、θψi——磁链观测器观测的转子磁链幅值和电角度(即转子磁链ψr和图中的θr)。
θr参与MT/αβ变换及αβ/MT反变换。
电流型磁链观测器宜于用在电动机转速较低的场合,但它获得转子磁链的精确度直接受到转子时间常数Tr、定子绕组自感Ls和定转子互感Lm等的影响。当异步电动机带负载运行时,由于负载是变动的,电动机的温升也随着负载的不同而变化。这就使转子时间常数Tr的值在大范围内发生变化,降低了这种磁链模型的精度。为了保证磁链不受转子转速的影响,可采用电压型的转子磁链观测器。
在转速闭环控制中,速度给定值ω*和通过测速机获得的速度反馈值ωr相比较,经过PI调节器,得到定子转矩电流的给定值iST*。此给定值和转矩电流反馈值iST比较,再经过PI调节器及电流电压转换器,可以获得达到该转速需要的转矩电压给定值uST*。
在磁链闭环调节部分中,给定转速ω*通过磁通函数表(即前述的磁链函数发生器)得出给定磁链值相应的励磁电流给定值iSM*,和经过坐标变换得到的实际的励磁电流反馈值iSM相比较后,进入磁链调节器得出给定励磁电流iSM*,也通过电流电压变换器得到给定磁链电压uSM*。
两个闭环输出输uS*T和uSM*同时输入MT/αβ坐标系变换,得到交流量给定值uα*和uβ*。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。