



本算法的基本思路是,鉴于图4-7中三电平基本空间矢量之间的角度均为60°的倍数这一几何特性,可以采用非正交的60°坐标系。这样一来会有助于简化参考矢量的合成和作用时间的计算,计算量减少,便于对三电平NPC逆变器实现快速脉宽调制控制。
为了计算方便,在本方案中,逆变器输出电平不采用P、O、N标记,而用2、1、0分别代替P、O、N。
1.60°坐标系
设采用的60°坐标系为gh坐标系,取g轴和αβ坐标中α轴重合,逆时针转60°为h轴,如图4-12所示。
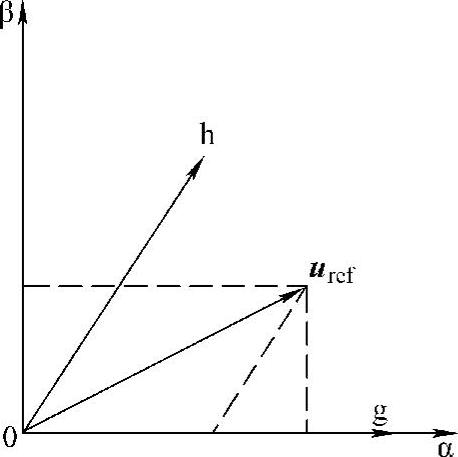
图4-12 gh坐标系与αβ坐标系
设参考矢量uref在αβ坐标系下的坐标为(urα,urβ),变换到gh坐标系下的坐标为(urg,urh),根据线性关系可得到两种坐标系的变换为下式:
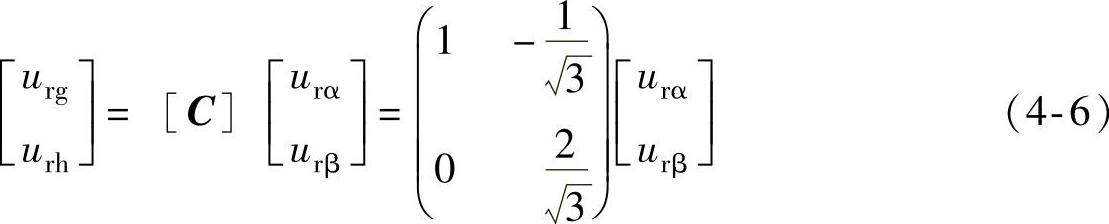
当以ABC坐标形式表示时,设三相电压为u(ua,ub,uc),则由Clark变换可以得到在gh坐标系下的电压矢量形式,其变换如下式所示:

将三电平逆变器的基本矢量变换到gh坐标系下,得到变换到60°坐标系下的三电平空间矢量图,如图4-13所示。
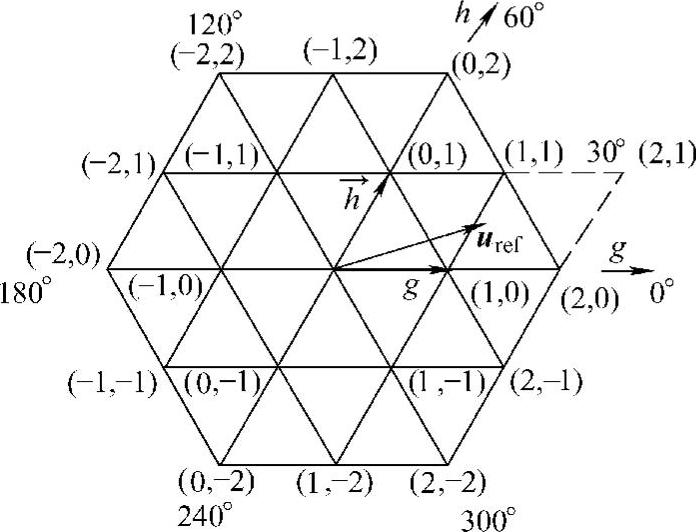
图4-13 60°坐标系下三电平空间矢量图
2.选择基本矢量
由图4-13可知,所有的基本矢量的坐标为整数,因此对于任意的空间参考矢量uref(urg,urh),距离其最近的4个电压矢量可以由空间参考矢量的坐标的向上和向下取整得到。对于如图4-13的参考矢量,对应的4个电压矢量设为
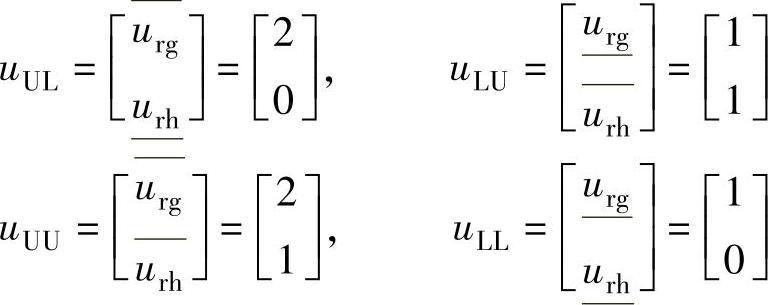
上式中,在坐标变量上画线表示向上或向下取整,且矢量下标U代表其中的变量向上取整,L代表向下取整。这4个矢量的终点构成一个等边平行四边形,此等边平行四边形被由uUL/uLU终点构成的对角线分成两个等边三角形。同时uUL/uLU总是两个最近的矢量。那么第三个矢量就是剩下的两个矢量中的一个,这个矢量必然与参考矢量落在由uUL/uLU的终点所构成的对角线的同一侧,此对角线为(https://www.xing528.com)
g+h=uULg+uULh (4-8)
因此根据表达式urg+urh-(uULg+uULh)的符号,我们便可以判断第三个矢量,即当表达式的值大于零,uUU是第三个矢量,当表达式的值小于等于零,则uLL是所要求得的第三个最近的矢量。以图4-13为例,求得的三个最近的矢量为
3.计算作用时间
当三个最近的矢量被确定,则可以通过下面的方程组的求解得出各个矢量的占空比:

其中,u1=uUL,u2=uLU,u3=uLL或u3=uUU。所有的开关状态的坐标为整数,方程组的解可以基于参考电压的小数部分而获得。
1)当u3=uLL时,将式(4-9a)按gh轴展开,并与式(4-9b)联立得
求解联立方程式(4-10),得
d1=dUL=urg-uLLg

2)当u3=uUU时,类似可以得到:

通过以上的推导,可以看出基于60°的坐标系能够简化大量的计算,弥补了传统算法的不足。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。