



三电平SVPWM具体算法多种多样,这里先叙述常用的传统算法,可分为下述四步。
1.三电平空间矢量的分解
如上所述,以大矢量(PNN)为起始沿逆时针每60°依次定义为扇区Ⅰ、Ⅱ…Ⅵ,再将每个正三角形区域分为4个小三角形,如图4-9所示,给定的参考电压矢量将处于这些小三角形中的一个。为了不使波形畸变和电压跳动,参考矢量应由最接近的三个空间矢量来合成。例如,当参考矢量处于图4-9中扇区Ⅰ的三角形B中时,所使用的空间矢量为(PON)、(PNN)以及(POO)/(ONN)。
依据对称原则,对每个60°大三角形区域进行分析,便可以得到整个周期360°范围内的矢量分布情况。由于逆变器调制深度不同,三相合成的电压空间矢量幅值也不同,则合成的电压空间矢量端点轨迹将会分别落在图4-9的4个小三角形内。
2.确定参考电压矢量位置与输出电压矢量
如前所述,SVPWM的首要任务就是根据参考矢量的辐角判断参考电压矢量位于哪个扇区内,对于三电平SVPWM,还要判断参考电压矢量在该扇区中的哪个小三角形内,然后得到合成参考矢量的输出电压矢量,依此确定出相应的输出电压矢量。判断方法是根据us的辐角θ和下面3条判据,便可依据表4-4判断该矢量位于哪个小三角形内。
表4-4 各小区的关系

判据1:
判据2:
判据3:
式中 uα、uβ——uref在α轴和β轴的分量。
在每个SVPWM控制周期中,可根据表4-5选定的4个矢量依次发出输出矢量,这种安排,可以使得输出电压矢量不会发生突变,确保平滑的输出的电压波形。从表4-5还可以看到,顺序发出的电压矢量具有一种邻接关系。
在表4-5给出的SVPWM控制算法中,用于合成的4个输出基本矢量的首发矢量都是正小矢量,这样可以有效地避免扇区切换过程中发生矢量突变。若首发小矢量都是负小矢量,只要将表4-5中4个输出矢量的次序颠倒一下即可。例如,当参考矢量位于B三角形中时,输出矢量的次序为POO→PON→PNN→ONN→PNN→PON→POO;如首发矢量采用负小矢量,则发送次序为ONN→PNN→PON→POO→PON→PNN→ONN。按此三相输出电压矢量时序如图4-10和图4-11所示,利用时序图和每个输出电压矢量的作用时间,便可得出本相桥臂相应开关器件的开关信号S。
表4-5 扇区Ⅰ中各小三角形相应的输出电压
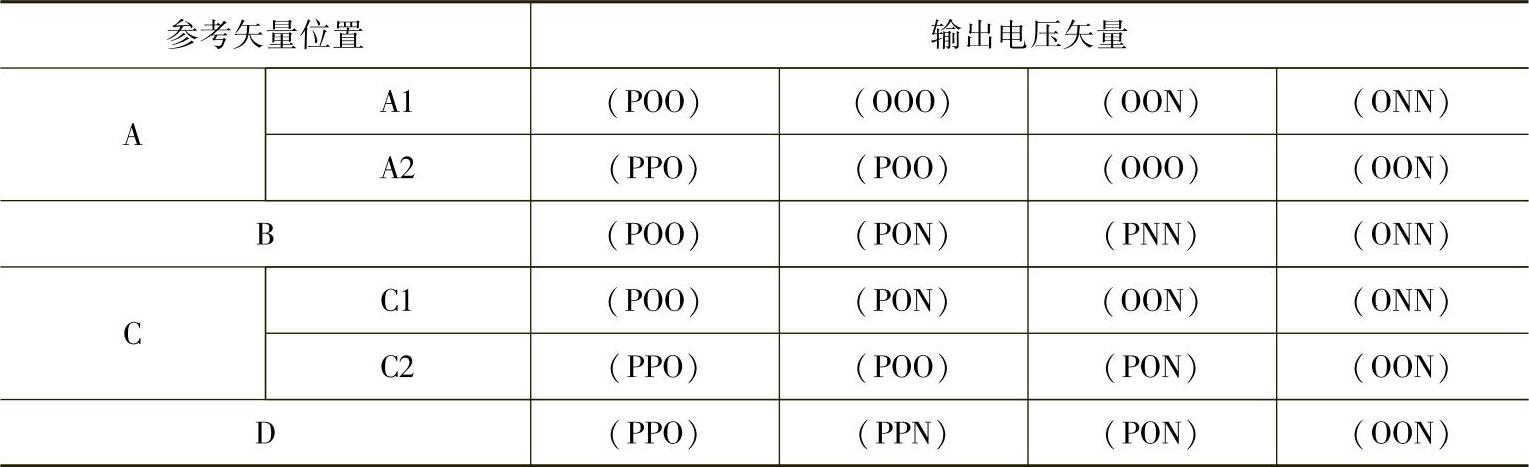
注:A1、A2,C1、C2表示两组组合方法,因为含有冗余小矢量。
3.计算输出基本电压矢量的作用时间
所谓输出基本电压矢量的作用时间即前面所述的持续时间,也就是开关器件的导通和关断时间。在图4-9中,设期望的电压矢量uref(即参考电压矢量)落在B三角形B中,按取邻近三矢量合成原则,由矢量u1、u3和u4合成,根据空间电压矢量合成的伏秒平衡原则,有
 (https://www.xing528.com)
(https://www.xing528.com)
式中 t1、t3、t4——矢量u1、u3、u4的作用时间;
Ts——空间矢量调制的控制周期。
因参考矢量uref=uref(cosθ+jsinθ),经过推导,可得
式中 M——调制深度,M=2uref/3。
按此方式,可以得出参考电压矢量位于三角形A、C、D中合成三矢量的作用时间。整个扇区Ⅰ的4个三角形作用时间见表4-6,根据对称性,即可求出其余5个扇区的矢量作用时间。
表4-6 扇区Ⅰ各个电压矢量作用时间

4.确定空间电压矢量调制模式
和两电平对称调制模式一样,按照中心对称原则,根据各矢量作用时间,可以分别得出参考电压矢量uref位于扇区Ⅰ四个三角形的三相输出电压矢量时序,也就可以得到空间电压矢量调制模式,分别如图4-10所示(当参考电压矢量位于其他扇区时可以按此类推)。根据扇区Ⅰ的空间电压矢量调制模式图,考虑到上述各个电压矢量的作用时间,由此就可以得到三相桥臂各开关器件的驱动信号,从而可以实施对三电平逆变器的SVPWM控制。

图4-10 空间矢量调制模式(1)
需要指出的是,图4-10给出的空间电压矢量调制模式是基于首发矢量为正小矢量的方案,如果首发矢量为负小矢量,则如图4-11所示。由图4-10和图4-11可以看出,输出电压矢量在一个PWM控制周期中对Ts/2对称,设四个输出电压矢量的作用时间分别为t1、t2、t3和t4,则t2=Tc/2,t3=Tb/2,t1+t4=Ta/2。关于t1和t4的分配将在后面阐述。
传统的三电平SVPWM算法有下述特点:
1)所生成的PWM信号是中心对称的信号,相当于两电平的八段对称调制式;谐波分量小,转矩平稳。
图4-11 空间矢量调制模式(2)
2)一个开关周期中的各相桥臂只有成对的一组开关器件在导通、关断,另一组则保持常通或常断,相当于单极性调制。
3)三相桥臂中每相只有两次电平变化,即关于半周期对称的一次上升沿和一次下降沿,这种对称式PWM非常适合于DSP或者高性能单片机未实现,极易于数字化。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。