



1.逆变状态的产生
逆变状态可以通过下述步骤实现:
1)当电动机处于发电状态时,负载能量回馈到直流侧,造成直流母线电压升高,实际检测的直流母线电压信号Ud比给定的直流母线电压信号Ud*大,经过控制算法运算和整流器的控制,使实际的直流母线电流减小,如此循环,直至减小为0,之后变成负值(直流母线电流反向),PWM整流器便进入逆变状态。
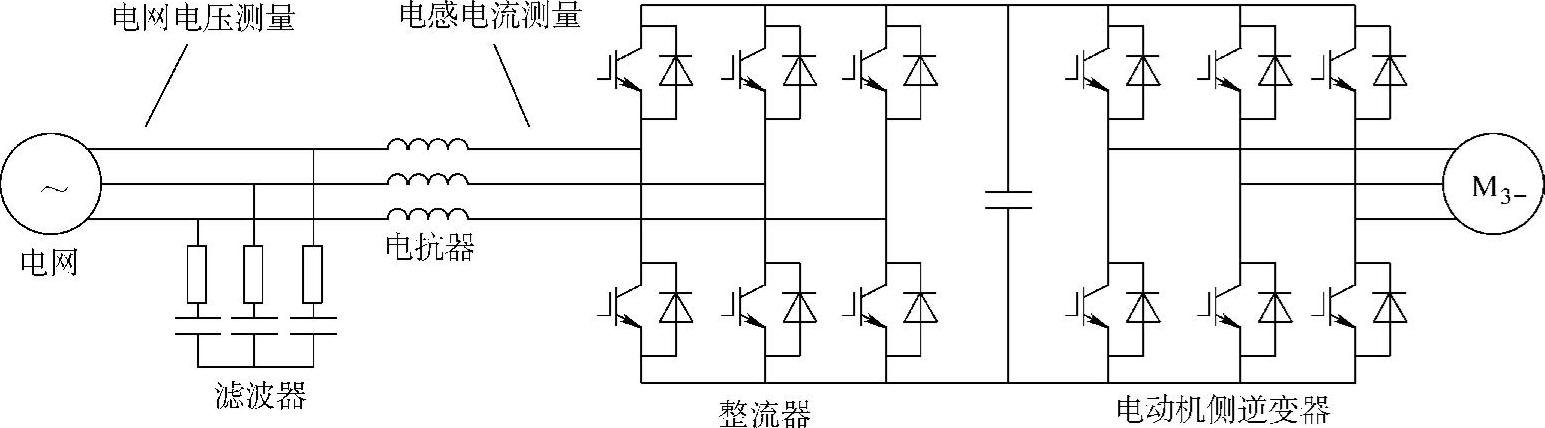
图3-28 双PWM变频器的主电路拓扑
2)根据图3-24,通过对us幅值和相位δ的控制,可以使i比u超前或滞后一角度φ,便可调节功率和功率因数,δ为u和us的夹角。当调节us超前电源电压u相位角δ,此时电路便处于逆变状态。当使u与电路电流i反相,如图3-29所示,则为功率因数为1的逆变状态,整流器向电网回馈有功功率能量。
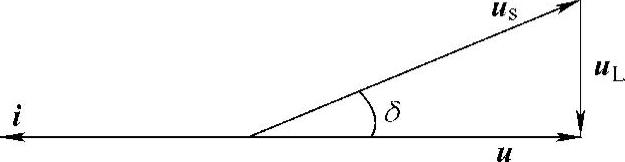
图3-29 逆变状态矢量图
2.四象限运行的控制
步骤如下:当变频调速系统工作于第一、三象限时,使u与电路电流i同相,电路工作于整流状态。当系统工作于第二、四象限时,可使u与电路电流i反相,电路便工作于逆变状态,完成四象限运行。
当双PWM变频器系统采用SVPWM技术控制时,可采用两片DSP芯片分别控制整流器和逆变器,其算法可参考上面所述的单独控制算法,但两片DSP芯片需有同步措施,不再重述。
[注1]矢量控制动态方程
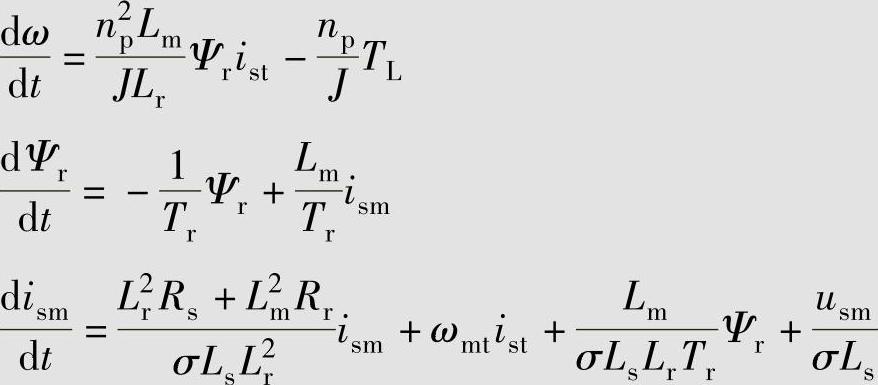
以定子电流is、转子磁链Ψr和转速ω为状态变量,用MT表示按转子磁链定向的坐标系,并使M轴与转子磁链矢量同向,即令Ψr=Ψrd、Ψrq=0、 =0,可得异步电动机转子磁链定向的状态方程:
=0,可得异步电动机转子磁链定向的状态方程:

式中 σ——电动机漏磁系数,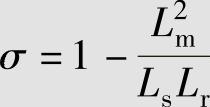 。
。
电磁转矩为
 (https://www.xing528.com)
(https://www.xing528.com)
转子磁链的旋转角速度:
按转子磁链定向的数学模型将定子电流分解为励磁分量ism和转矩分量ist,电磁转矩正比于转子磁链与定子电流转矩分量的乘积,转子磁链的幅值与旋转角速度均受定子电流的控制,与定子电压无直接的关系。因此,就转子磁链和电磁转矩而言,按转子磁链定向的动态模型属于电流控制型。
[注2]直接转矩控制动态方程
以定子电流is、定子磁链Ψs和转速ω为状态变量,采用按定子磁链定向(仍用dq轴变量表示),使d轴与定子磁链矢量重合,则Ψs=Ψsd、Ψsq=0、 ,异步电动机按定子磁链定向的动态模型为
,异步电动机按定子磁链定向的动态模型为
电磁转矩:
Te=npΨsisq
由 可得,定子磁链旋转角速度:
可得,定子磁链旋转角速度:
按定子磁链定向,也可将定子电流分解为转矩分量isq和励磁分量isd,电磁转矩与按转子磁链定向的转矩表达式在结构上相同,但定子磁链的幅值与旋转角速度分别受定子电压的控制,是受电流扰动的电压控制型。
Ψs=Lsisd-σLs(ωdq-ω)Trisq

由此可得:

在理想空载时,ωdq=ω,则Ψs=Lsisd。随着负载的增加,(ωdq=ω)2增大,由于σ较小,故f(ωdq-ω)<1,导致定子磁链减小。因此,定子电流的转矩分量呈去磁作用,其耦合程度大于按转子磁链定向。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。