



1.系统的构成与工作原理
根据上述,通过适当地控制,可以解决功率低下的问题,能使功率因数为1;还可以使变频器的输入电流波形为正弦波,抑制谐波分量和保持直流电压恒定。具体的方法不少,这里采用有功和无功直接控制的方法,将ABC三相坐标系转换为dq坐标系,根据dq坐标系下的数学模型,结合滞环控制和矢量控制优点,构成功率滞环SVPWM整流器控制系统如图3-25所示。该系统的特点是以保持功率因数等于1为目标,采用双闭环,外环采用电压PI调节器(AVR)控制的电压环,保证输出电压稳态无误差;内环采用滞环控制的电流环,使电流响应更加快速,使整流器具有良好的动态特性和鲁棒性;而SVPWM控制提高了直流利用率。
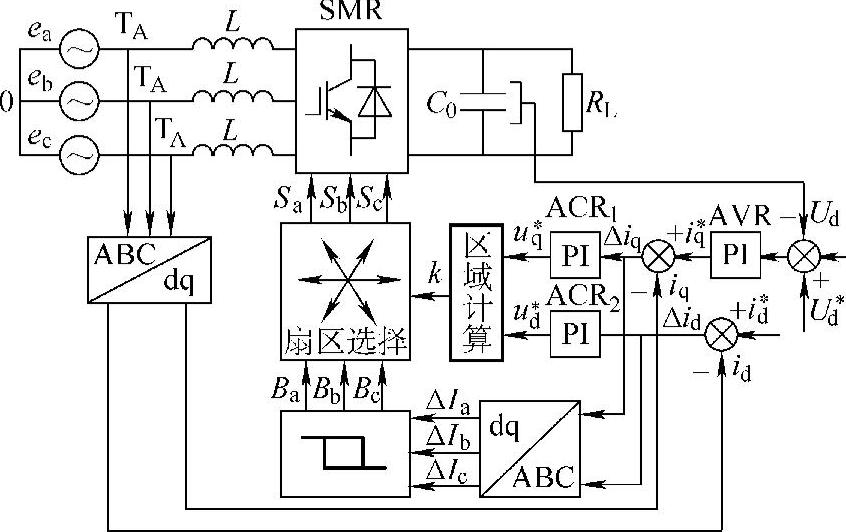
图3-25 功率因数为1的SVPWM功率滞环控制系统
AVR输出为内环电流控制提供电流有功分量iq的参考值iq*,为获得功率因数为1,则电流的无功分量id的参考值id*=0。交流侧的电流信号通过ABC/dq变换获得实测值id、iq分别与id*、iq*比较,其误差值ΔidΔiq通过积分环节分别得到交流侧指令电压矢量u*在d、q轴上的投影值ud*,uq*;进而可判断u*所在区域及其相应的状态信号值Ba.Bb.Bc。
2.控制算法
下面讲述系统算法。设αβ坐标系为两相静止坐标系,当t=0时,d轴与α轴重合,dq坐标系以角速度ω逆时针旋转。图3-26所示为u*的dq坐标分解,由此可得u*与α轴夹角θ为

u*所在的第K扇区与θ的关系为

式中 INT——取整数。
具体控制过程如下:
图3-25中区域计算框所用公式为式(3-27)及式(3-28),得到u*所在区域k,k=i,以Ru*(i)表示,i=1,2,…,6。(https://www.xing528.com)
图中dq/ABC坐标变换框得到ΔIa、ΔIb、ΔIc3个误差值,经过滞环调节器比较,得到对应的三相状态信号BaBbBc。BaBbBc有j种组合,j=1,2,…,6。每种组合用RΔI(j)表示,它们的对应关系如式(3-29)所示。Ba表示ΔIa>0,Ba表示ΔIa<0,Bb、Bc仿此。电流滞环控制原理与图3-9和图3-12相同。
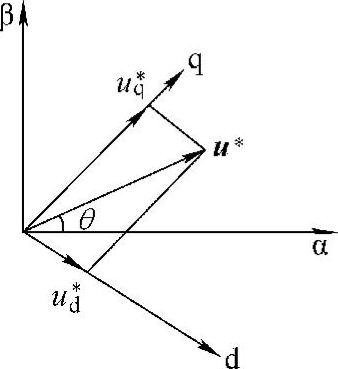
图3-26 u*的dq坐标分解
表3-10为RΔI(j)、Ru*(i)与输出电压矢量uk的选择。已知所在区i和所要的开关信号j,从表中查出所要的电压矢量uk,便得到输出三相开关状态Sa、Sb、Sc,以此进行控制整流器,达到功率因数为1的目的。
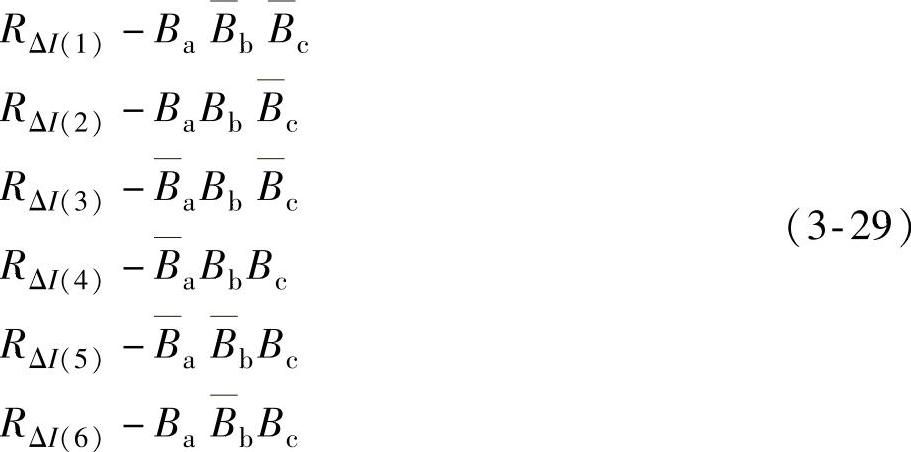
表3-10 RΔI(j)、 与uk的选择
与uk的选择
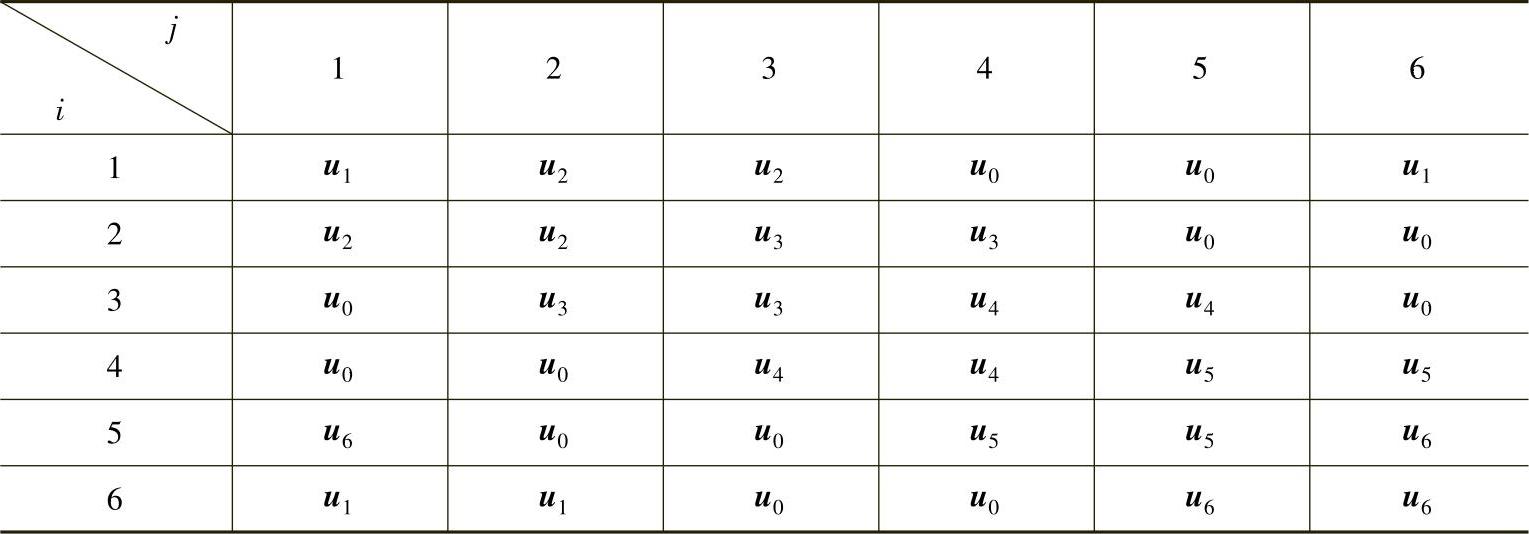
图3-27所示为a相电压、电流的仿真及负载实验结果波形。
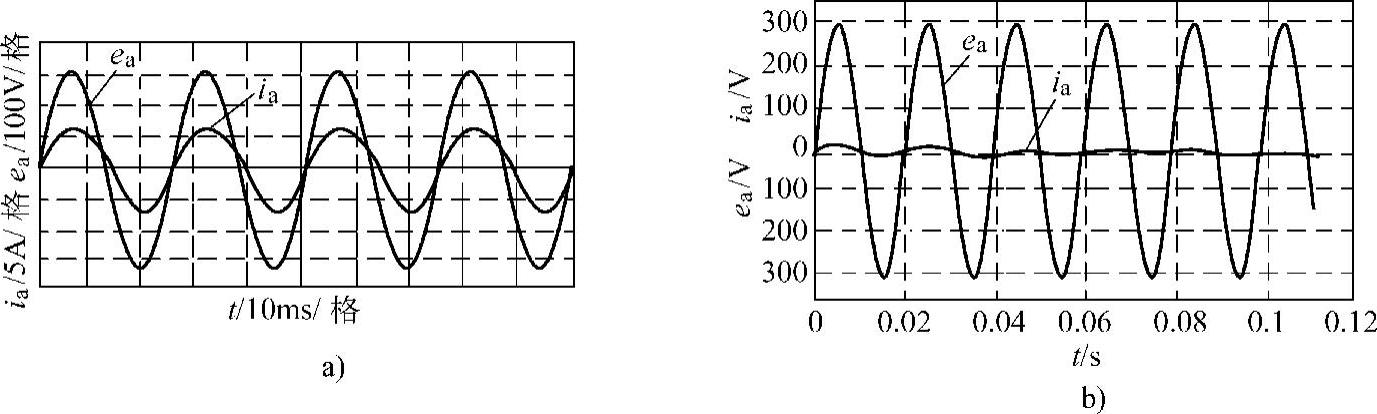
图3-27 a相电压电流波形
a)仿真 b)实验结果
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。