



如上所述,异步电动机直接转矩控制策略是通过选择适当的定子电压矢量;把转矩T和定子磁链误差限制在滞环内,从而得到一个无噪声驱动。显然,转矩T、磁链Ψ的偏差区分越细,定子电压矢量的选择也就越精确,控制性能改善更好。本系统转矩调节器设计成两滞环特性单元的组合结构,转矩偏差状态用2个输出信号T1和T2来表示,见表3-6。
表3-6 转矩调节器输出信息表
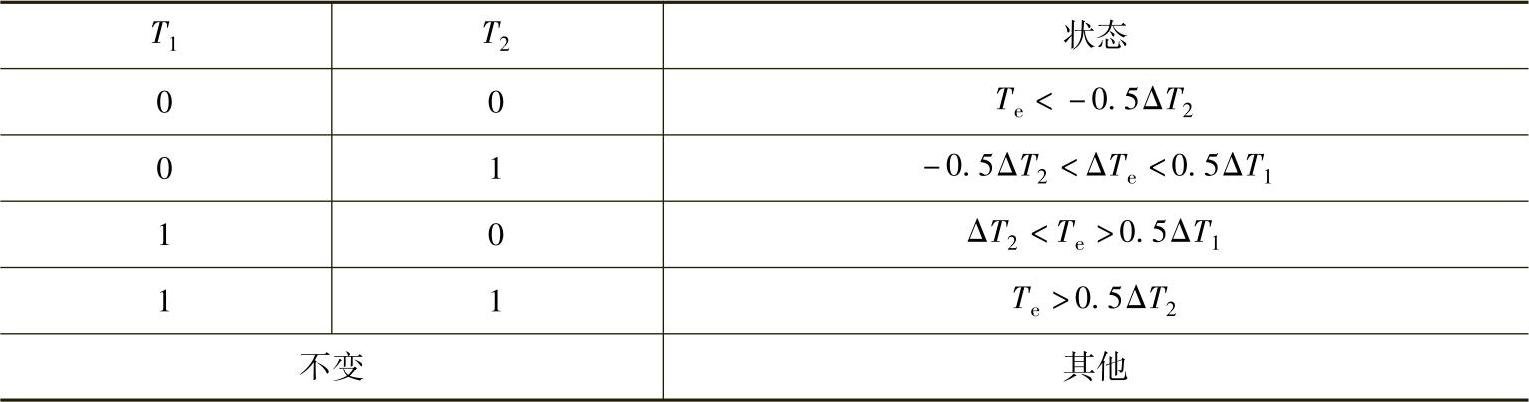
注:ΔT1,ΔT2——两滞环宽度
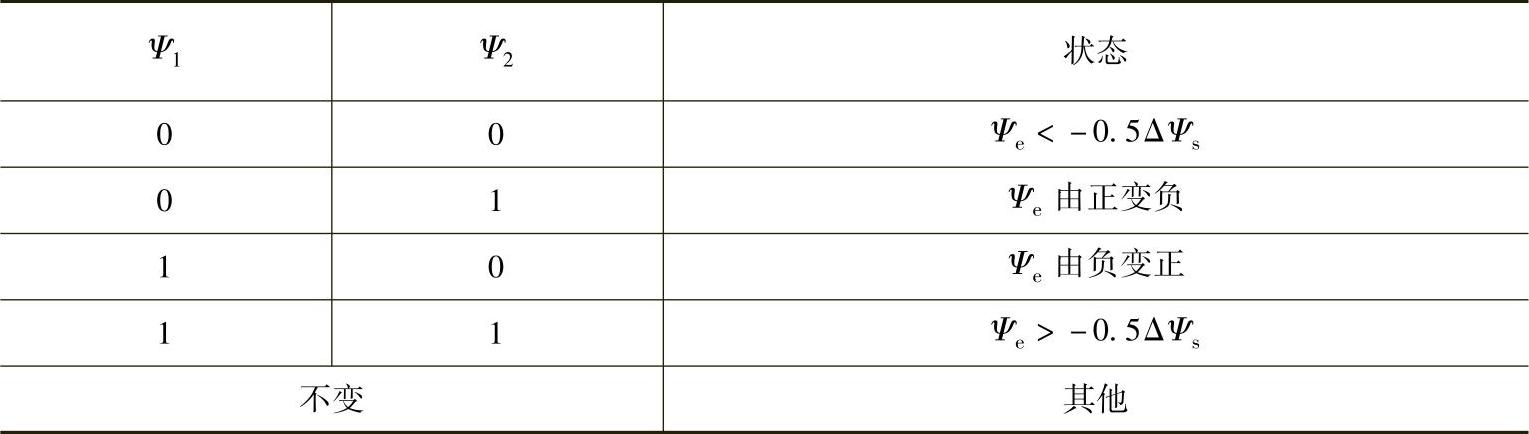
磁链调节器设计成继电特性单元和滞环特性单元的组织结构,磁链偏差状态用输出信号Ψ1和Ψ2来表示,见表3-7。
表3-7 磁链调节器输出信息表
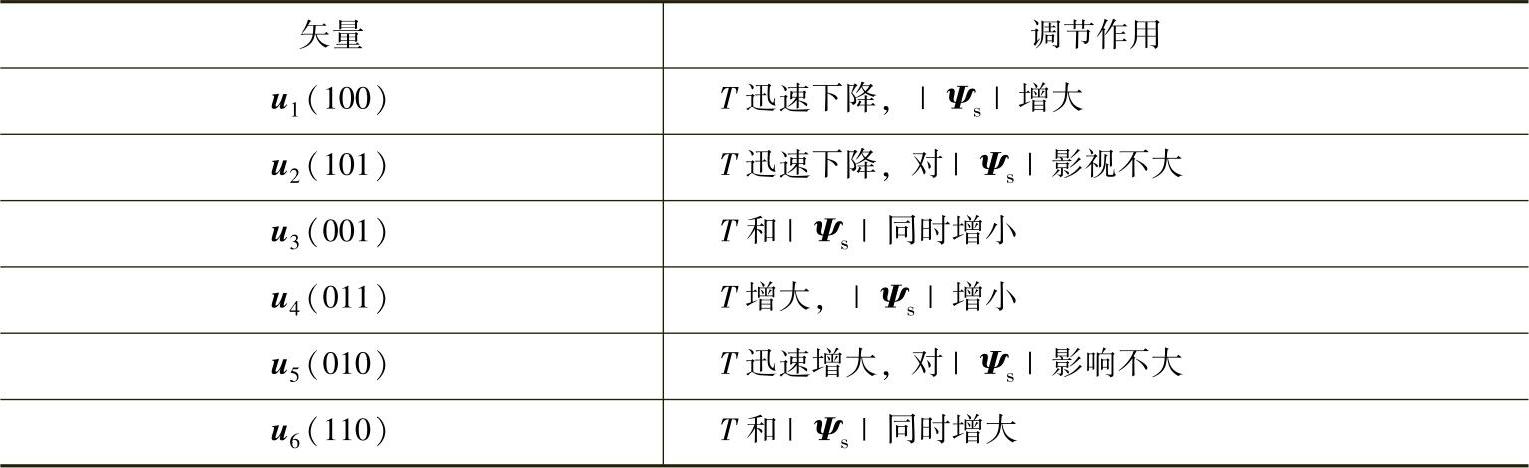
如上面所述,不同的电压矢量在不同的瞬间对磁链和转矩产生的影响的强弱程度是不同的,这与磁链当前所处的扇区有关。以图3-19b所示扇区Ⅰ为例,当Ψs处于该区间时,6个非零电压矢量ui(i=1~6)对于Ψs和T的调节作用,见表3-8。
表3-8 空间电压矢量调节作用表(https://www.xing528.com)
根据图3-19b和表3-6表3-8,就可以选择出最合适的非零电压矢量。表3-9给出了扇区Ⅰ的磁链转矩控制表,其他区间可按相同方法获得。因此可获得正确的开关状态选择,实现对磁链和转矩的直接自控制。表3-9中Te为二维,其中,第一个量代表转矩大小,1表示转矩大,0表示转矩小;第二个量代表在滞环内还是在滞环外,1表示在滞环内,0表示在滞环外。Ψe也为二维,其中,第一个量代表磁磁链大小,1表示磁链大,0表示磁链小;第二个量代表在滞环内还是在滞环外,1表示在滞环内,0表示在滞环外。
表3-9 扇区Ⅰ的磁链转矩控制表

(续)
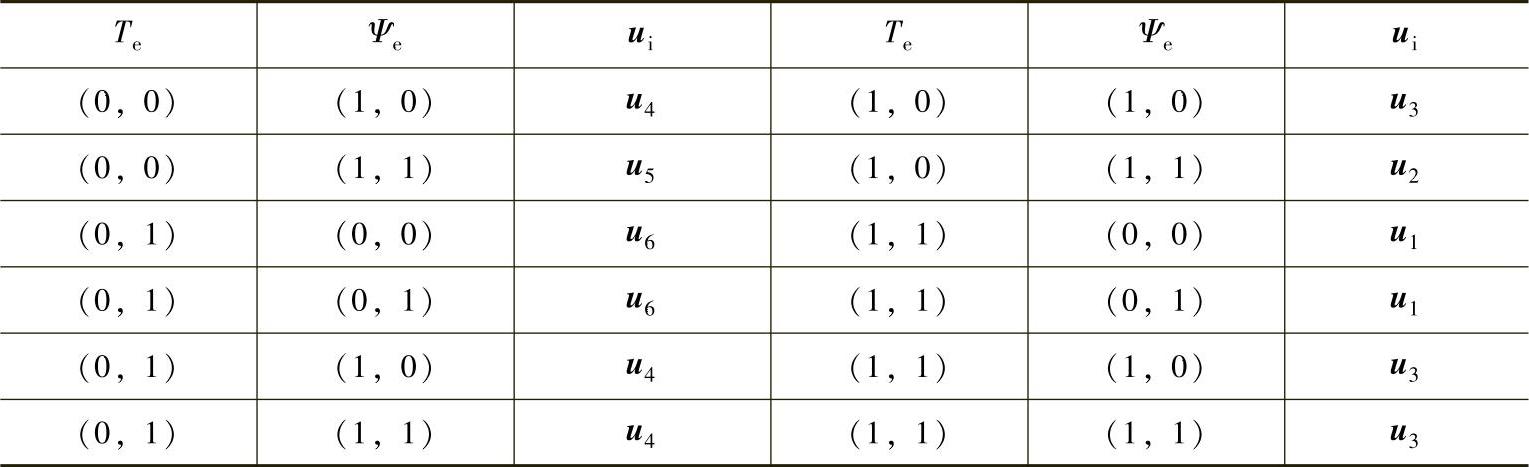
系统运行步骤与一般直接转矩控制系统相同,只是要根据表3-9选择电压矢量,即可得到期望的控制效果。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。