



1985年,德国学者M.Depenrock首次提出了直接转矩控制理论,随后日本学者I.Takahshi也提出了类似直接转矩控制方案,以后逐步完善成为今天普遍采用的方案,此方案具有下述特点:
1.直接转矩控制的优点
1)直接转矩控制在定子坐标系下分析交流电动机数学模型,直接控制磁链和转矩,计算简单;
2)直接转矩控制以定子磁场定向,只需定子参数,而不需随转速变化的不易测定的转子参数,减少了参数变化对系统性能的影响;
3)直接转矩控制用电压矢量直接控制转矩,控制信号的物理概念明确;把误差限制在容许的范围内,控制直观又简化。
4)采用SVPMM技术,控制和计算简便,直流利用率高,效果优于SPWM。
2.直接转矩控制存在的问题与原因
上述传统的直接转矩控制系统由于电压矢量切换,存在有转矩脉动的缺点,现分析于下:控制电动机的输入电压可以控制电动机的转矩输出,在电压矢量us的作用下,转矩Te变化的微分方程可以用下式表示

式中 ΨsΨr——定、转子磁链;
ωr——转子角速度;
np——极对数;
Ls,Lr,Lm——定、转子电感和互感;
Rs,Rr——定、转子电阻;(https://www.xing528.com)
Rm=RsLr/Lm+RrLs/Lm;
Lσ=(LsLr-Lm)2/Lm;
 ——叉乘。
——叉乘。
式(3-20)可以分解为非零电压矢量作用和零电压矢量作用,由非零电压矢量作用而产生的转矩变化如下

式中 ts——控制周期。
由零电压矢量作用而产生的转矩变化如下
ΔT″e=(-npωrΨsΨr-RmTe)ts/Lσ (3-22)
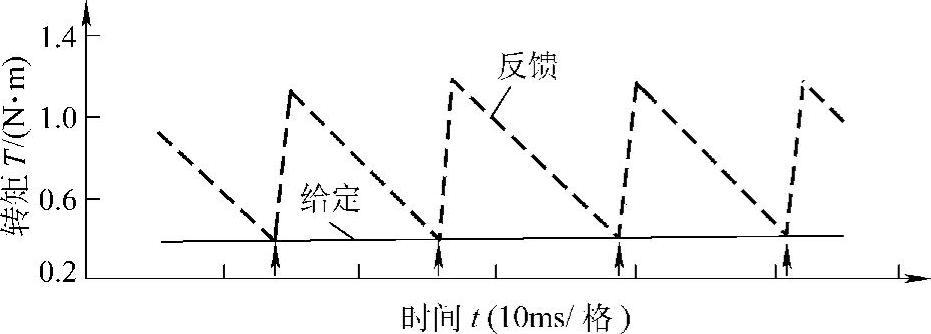
图3-15 传统直接转矩控制低速转矩调节情况
从式(3-21)中看出,非零电压矢量可以使转矩增大或减小,其改变量不但与速度有关,而且还与电压矢量有关。从式(3-22)中可以看出在转矩大于零的情况下ΔT″e<0,说明零电压矢量只能使转矩减小,并且对于转矩变化的作用与速度有线性的关系:高速时,ωr较大,导致转矩的下降值大;低速时,ωr较小,导致转矩的下降值小。在进行转矩调节的时候,需要连续有很多个采样周期的零电压矢量作用才能使反馈转矩下降到给定转矩,但是一个非零电压矢量作用就会使转矩上升很多。电压矢量切换主要发生在零电压矢量与非零电压矢量之间的切换,每一次切换都将导致转差率发生突变,如图3-15所示的波形中的箭头处。切换时转矩突变的倍数可以由下式表示

当np=2,ωr=0.785rad/s,|us|=540×2/3V,Te=1N·m,电压矢量与磁链之间的夹角为60°时,m≈110,显然,突变倍数是很大的。由于在连续的零电压矢量作用时,转矩没有突变,而切换时有突变,这样就形成了周期性的转矩脉动,并且转速越低造成零电压矢量越多,周期的时间就越长,于是转矩脉动的效果就越明显,对转速性能的影响也越大。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。