



传统的直接转矩控制系统如图3-8所示。先看Ψs与控制信号的形成,从逆变器UT输出测得三相电压uABC和三相电流iABC,经3/2矢量变换,得出uαβ、iαβ;再按式(3-12)、式(3-13)计算得eαβ,经积分器AMM得Ψαβ;再用2/3变换器UCT变换成ΨABC,进入施密特触发器DMC与给定值Ψsg比较,进行bang-bang控制,得出磁链开关信号 ,使磁链保持在允许容差之内。
,使磁链保持在允许容差之内。
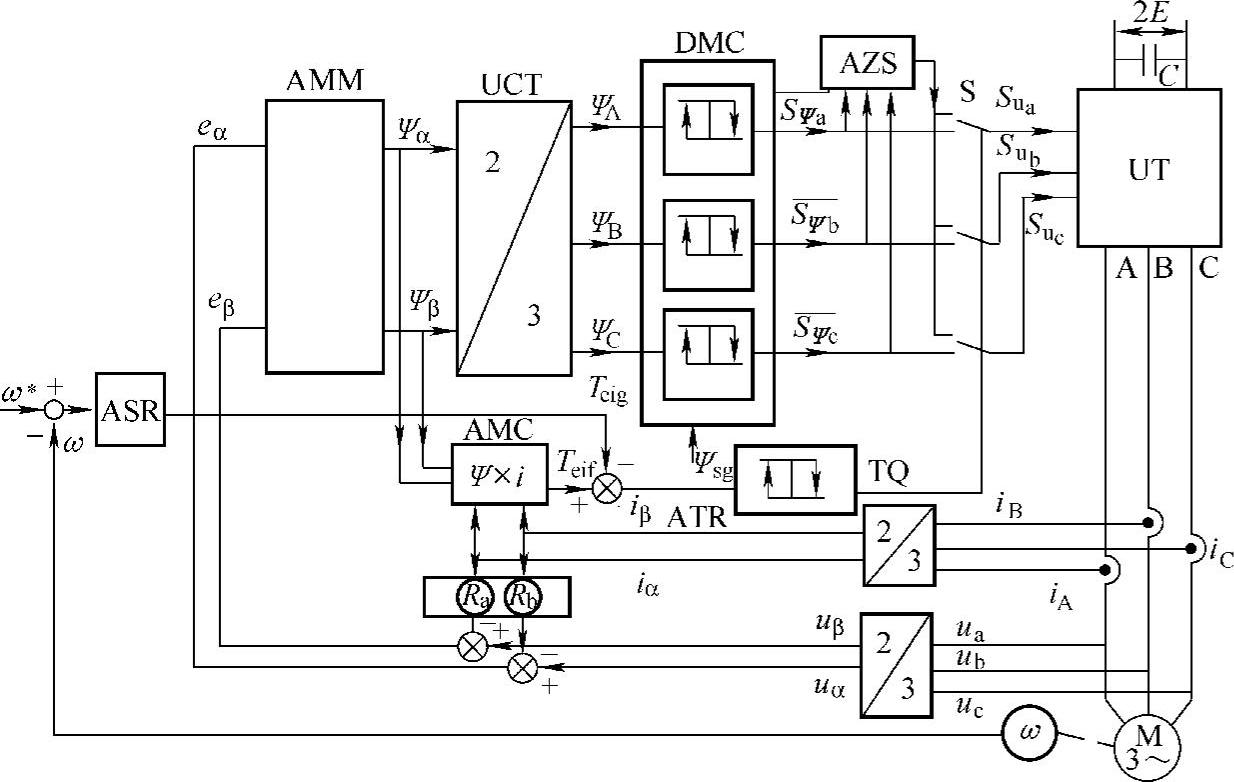
图3-8 直接转矩控制系统
再来看转矩控制,上面得到的iαβ和Ψαβ送入转矩计算器AMC得出计算值Teif,与给定值Teig比较,经另一个施密特触发器ATR得出bang-bang控制信号TQ,在 、TQ和零状态开关AZS共同作用下,最后得到逆变器三相控制的开关状态信号
、TQ和零状态开关AZS共同作用下,最后得到逆变器三相控制的开关状态信号 ,形成所需要的磁链轨迹。
,形成所需要的磁链轨迹。
由于转矩也采用bang-bang控制,便能较精确地控制转矩转速。以电动机正转为例,若实际转矩低于Teig值(下限),按系统磁链控制所得到的相应的电压空间矢量使定子磁链向前旋转,转矩上升;若实际转矩达到高于的允许值Teg(上限),则不论磁链状态如何,系统立即切换到零电压矢量,使定子磁链静止不动,转矩下降。上述情况不断重复,使转速保持恒定,而将转矩脉动控制在允许的范围内。
磁链滞环和施密特触发器如图3-9所示。
磁链闭环控制方法的基本思路是,在磁滞环内给定一个磁链环形误差带,通过转矩和磁链的双值调节来选取合适的电压矢量uK,强迫定子磁链矢量的顶点不超出圆形误差带,即图3-9a的双圆周之间。(https://www.xing528.com)
各电压矢量的作用区间如图3-9a所示,以a轴为扇区Ⅰ的中心,沿逆时针方向把整个圆分为6个扇区。每个扇区的磁链顶点运行轨迹由该区段对应的两个电压矢量形成。为了控制磁链的旋转方向,规定逆时针运行的磁链,如扇区Ⅰ由u2、u3形成,扇区Ⅱ由u3、u4形成。对于顺时针磁链,每个边的形成取此位置上在空间相反的电压矢量,如扇区Ⅰ由u5、u6形成,扇区Ⅱ由u6、u1形成。按此合理地选择误差带和电压矢量,即可控制圆形磁链的大小和方向。
施密特触发器结构如图3-9b所示,由三个双向调节器组成,分别接收三相Ψ信号,当反馈信号输入时,分别与三相信号比较,当到达允许值时,分别输出三相动作信号Sa、Sb、Sc。

图3-9 磁链滞环和施密特触发器
国外许多公司生产的变频器如ABB公司的ACS1000系列变频器采用上述传统的直接转矩控制方式,效果良好。
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。