



鉴于矢量控制的性能受电动机参数影响较大,加上矢量变换甚为复杂,转子磁链的准确计算和观测比较困难,实际控制效果常常难于达到理论分析的结果。另一种有效的控制技术可以克服这个缺点,这就是直接转矩控制方式。这种控制方式所需数据是直接从定子侧测出的,计算定子磁链,直接控制转矩,可使调速性能稳定、动态响应快,弥补矢量控制的不足,因不需要转子数据,故称直接转矩控制(DTC)系统。
传统的直接转矩控制系统采用磁链滞环配合双位式调节器(施密特触发器)的控制方式,并在系统转速环内再设置磁链内环,分别控制电动机的转速和磁链,即可以抑制磁链的变化对转速的影响,系统框图如图3-7所示。
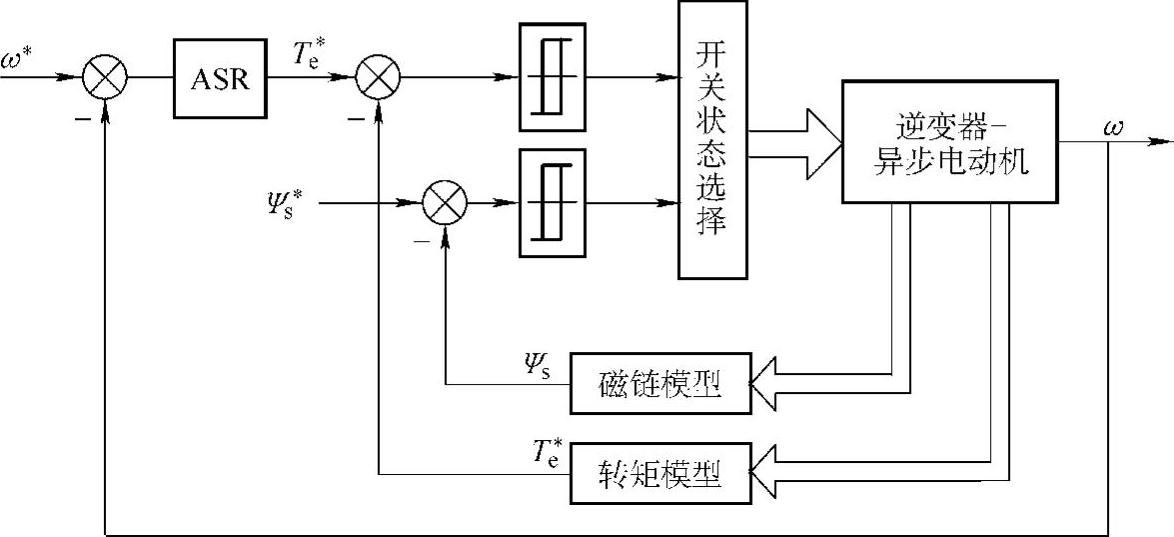
图3-7 直接转矩控制原理框图
ω—角速度ASR—转速调节器 Te*—转矩指令值、转矩计算值 Ψs—定子磁链计算值
系统取消复杂的旋转坐标变换,仅在二相静止坐标系上构成转矩和定子磁链的反馈信号,因此大大地简化了系统;并用双位式施密特触发器进行bang-bang控制,代替线性调节器来控制转矩和定子磁链,根据两者的变化,选择电压空间矢量脉宽调制(SVPWM)开关状态,以控制电动机的转速,达到控制转矩的目的。开关状态选择是通过磁链滞环设定来确定的。
从图3-7可看到,直接转矩控制的关键问题是要有定子磁链和转矩的数学模型,可按下列次序求得,首先将三相交流电压、电流按三相变两相的变换得出uα,uβ,iα,iβ,如:
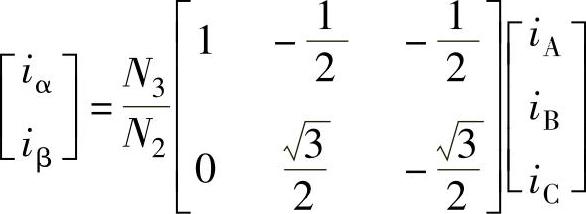
于是可得数学模型表达式[注2]。(https://www.xing528.com)
定子磁链Ψs:
Ψsα=∫(usα-R1isα)dt=∫esαdt (3-12)
式中 R1——定子电阻。

转矩
Te=Ψs·is
Te=Pn(isβΨsα-isαΨsβ) (3-15)
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。