



通过上述变换,我们得到了可用于控制的iM(励磁电流分量)、iT(转矩电流分量)作为控制量,记为iM*、iT*,通过矢量旋转变换得两相交流控制量iα、iβ,记为iα*、iβ*,然后再用电流电压变换器变换为电压控制量uα*、uβ*,输入SVPWM即可完成矢量控制。由于将直流标量作为电动机外部的控制量,然后又将其变换成交流量去控制交流电动机的运行,均是通过矢量坐标变换来实现的,因此将这种控制系统称之为矢量变换控制系统,通常简称为矢量控制系统。
按照上述思路,构成实用的矢量变换控制系统的方案很多,这里介绍一种直接转子磁场定向,速度、磁链闭环的SVPWM控制系统框图,如图3-5所示。读者可以通过这个例子具体了解矢量变换控制的本质、实现和SVPWM控制方法。所谓转子磁场定向,就是将转子磁场Ψr与M轴相重合。
1.直流量iM、iT的产生
从电动机定子侧测出定子电流ia、ic,经ABC坐标系(ib=-ia-ic)→αβ坐标系变换(3/2变换)得iα、iβ(不计零序分量),定子电压uab、ubc也经ABC坐标系→αβ系变换器(3/2变换)得uα、uβ;iα和iβ送αβ坐标系→MT坐标系变换(旋转坐标变换)得到iM和iT,iM,iT就是作为系统反馈量的直流量。
2.控制信号的形成
从图3-4可看到,系统有两个输入端,其一是转速给定ω*,与转子磁链观测器输出的实际转速ωr比较后进入速度调节器得到转矩给定Te*,经除法器除以|Ψr|(转子磁链观测器输出)即得电流给定iT*,iT*与实际iT比较后进入电流调节器PI(电流电压变换器)就得到给定电压uT*,(转矩给定信号)。另一路ω经磁链给定函数发生器得到磁链给定|Ψr|*,它与由转子磁链观测器输出的转子磁链Ψr比较后经调节器得到给定激磁电流iM*,iM*与反馈电流iM比较后进入调节器(电流电压变换器)即得给定电压uM*。这时uM*、uT*都是直流量,故要经过坐标逆变换(旋转坐标变换2/3变换),即MT坐标系到αβ坐标系,得到uα*、uβ*,输入变频器环节,便可形成逆变器驱动信号,从而控制开关器件的通断,实现转矩转速的控制。函数发生器有实现恒功率、恒转矩控制功能。当转子转速ωr≤ω*时,控制转子磁链为恒值,实现恒转矩;当ωr<ω*时,控制转子磁链随转子转速增加而减少,实现恒功率控制(弱磁控制)。
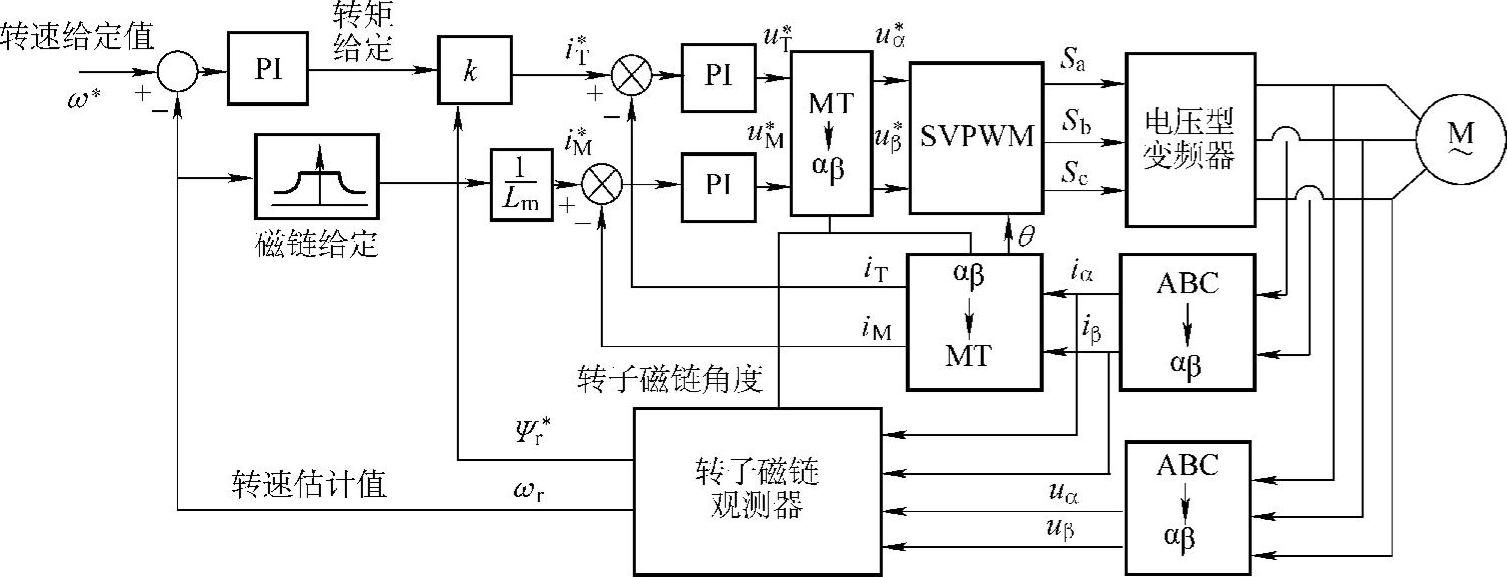
图3-4 转子磁场定向矢量控制SVPWM系统
3.SVPWM环节——变频器[3,4](https://www.xing528.com)
图3-5所示系统中的变频器是电压型变频器,SVPWM环节为SVPWM调制算法环节。在此环节中,输入的是uα*、uβ*,因此可按上一章图2-23调制算法进行调制计算。先计算出参考矢量(包括了转矩、磁链控制信息),再计算辐角θ,调制系数M,判断扇区K,再找到合成所需电压矢量,采用对称调制模式,计算作用时间(T=1/6f)、开关序列,便可输出逆变器三相开关信号Sa、Sb、Sc,使变频器驱动三相异步电动机工作。图3-5所示为系统控制效果典型仿真波形,可见动稳态下转速转矩、输出电流波形十分良好。
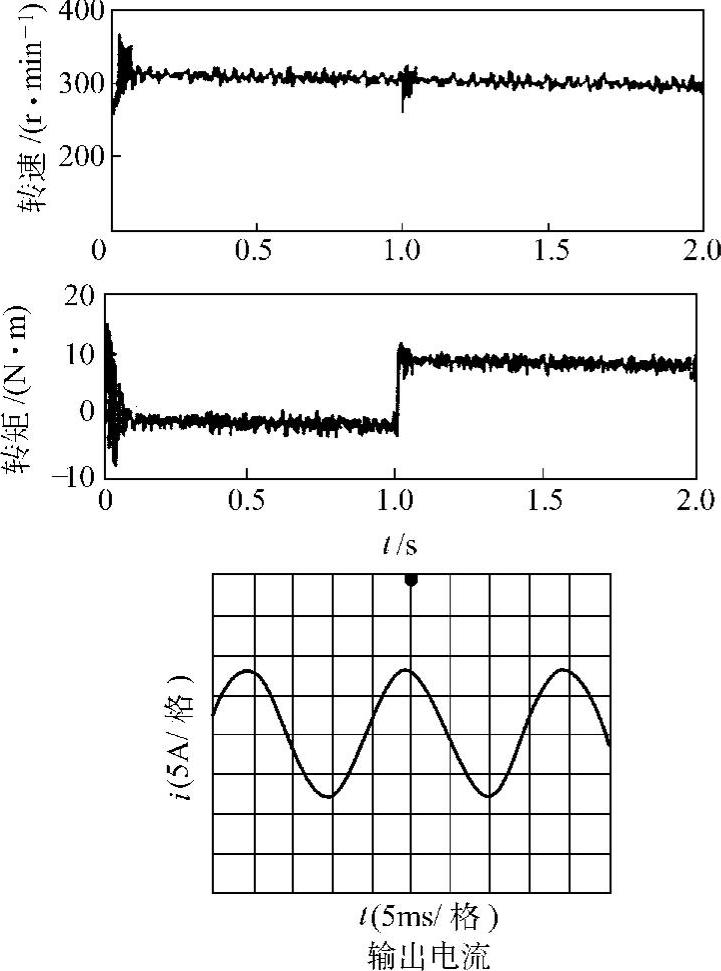
图3-5 系统控制效果典型仿真波形
采用SVPWM技术的矢量控制系统发挥了各自的优点:矢量控制使动、稳态性能提高,SVPWM使谐波大为削减,SVPWM使转矩平稳,直流电压利用率高,二者珠联璧合,锦上添花。
上面所述的矢量控制系统,虽然取得良好的动、稳态品质,但低频段输出仍有一定的谐波分量,容易造成机械共振,使系统不能正常工作,仍须加入改进措施。第1章中提出了不少对策,但显得烦琐被动,或者还要增加硬件,因此有学者提出在电路系统中改进设计,达到避免共振的方法,例如采用混沌SVPWM,可以有效地抑制可能出现的机械振动,控制系统如图3-6所示。
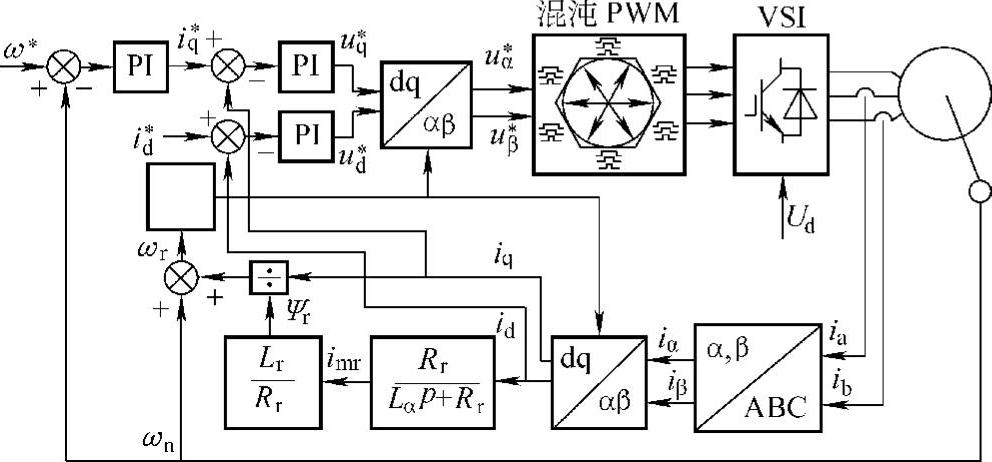
图3-6 采用混沌SVPWM的矢量控制系统
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。