



空间矢量控制是用空间矢量运动轨迹及时地跟踪基准矢量的轨迹来实现的,因此找出基准矢量的轨迹是很重要的。
空间矢量控制的任务是采用图2-36所示的开关矢量合成出基准电压矢量的轨迹。空间矢量控制可以分成两步;第一步是选择开关矢量,并计算出每一个开关矢量持续的时间;第二步是确定基准开关矢量的顺序。
1.实用开关矢量的选择
选择开关矢量的条件是消除轨迹产生的“小环”,降低电感电流的谐波。对于三相三桥臂逆变器,选用两个相邻的非零矢量和零矢量合成出来的基准电压矢量就能满足上述要求。而对于三相四桥臂逆变器,必须首先区分并找出邻近矢量。如图2-37所示,在一个60°区域里,有6个非零矢量和两个零矢量可供选择。为此在所示的60°区域里可以分成4个如图2-38所示的邻近矢量四面体,每一个四面体都是由三个邻近非零矢量(以其顶端构成的三角形为底)和两个零矢量(以所在点为顶)构成的。这种四面体又都是由相邻的开关矢量确定的。每一个实用的开关矢量的持续时间也都可以用和三桥臂逆变器相同的方法计算出来。假定采用的基准电压矢量是在图2-38a所示的四面体中,则选用的开关矢量就是u8(1000),u9(1001),u13(1101),u15(1111),u0(0000)。
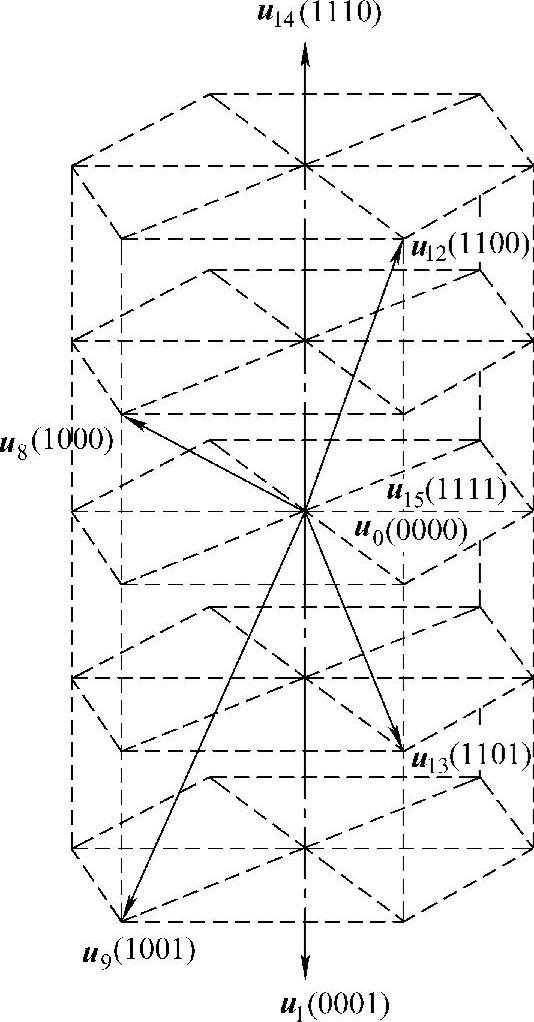
图2-37 在60°区域里的开关矢量
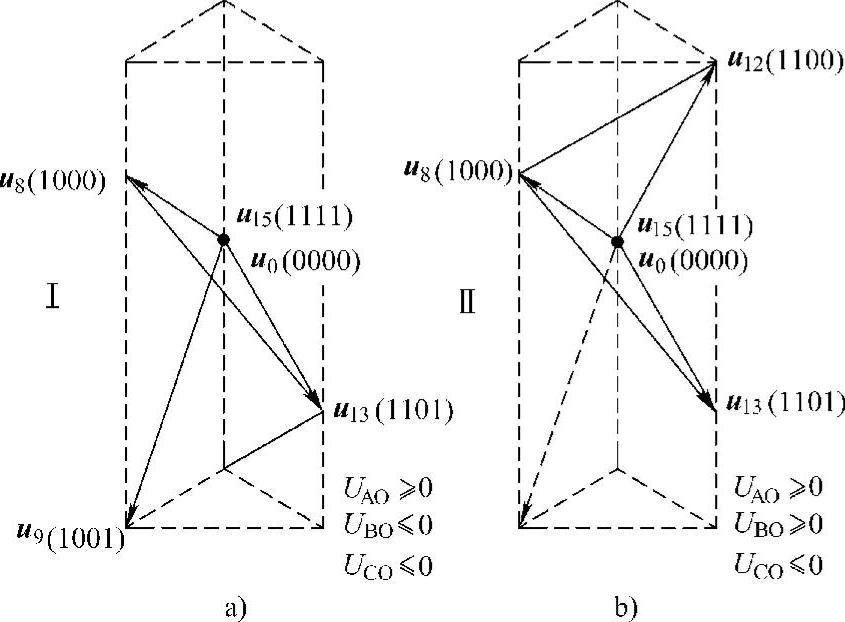
图2-38 确定邻近矢量的四面体(https://www.xing528.com)
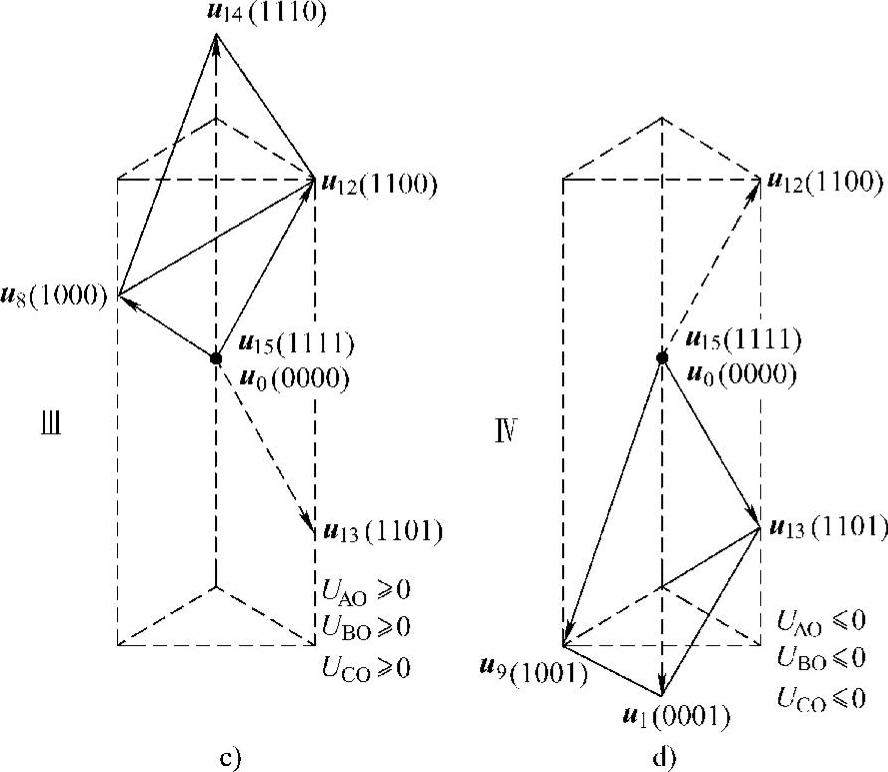
图2-38 确定邻近矢量的四面体(续)
2.开关矢量顺序的选择
对于三相三桥臂逆变器,为了使轨迹不产生“小环”,减少开关动作次数,减少开关损耗以及减少输出电压总谐波失真(THD)的条件是交替选择邻近矢量的转换顺序。对于四桥臂逆变器,也同样按照这个条件选择开关矢量的顺序。图2-39所示为常用的顺序选择方案,是按对称性选择的顺序。
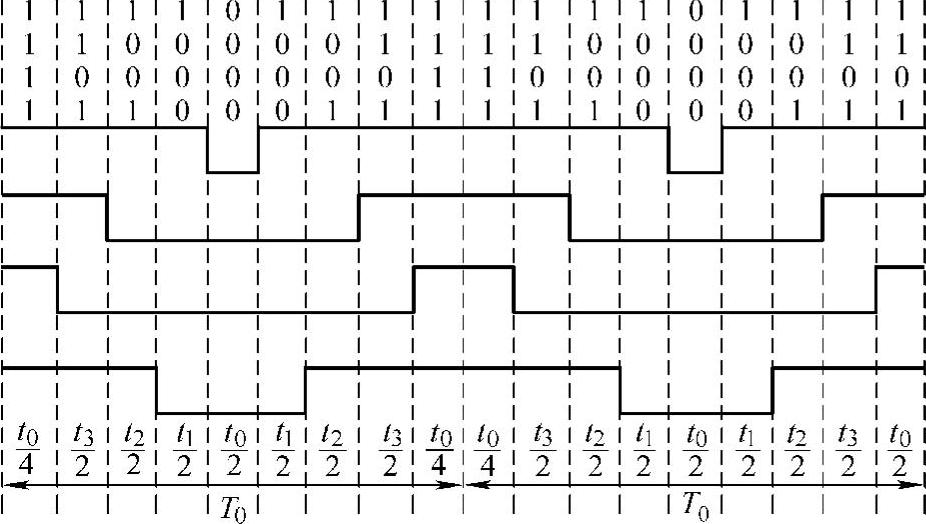
图2-39 对称性选择的顺序
免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。