



在调速系统中,输出电压矢量与起始电压矢量的夹角,常可从电动机测速仪器测出的角度算出,在实际操作时,首先根据输出电压矢量的角度判断出它所处在扇区,然后求出它相对于扇区起始矢量方向的角度θ,对应的电压矢量,最后按式(2-9)~式(2-11)计算所需的控制量(如工作时间)等,输出三相开关信号,使逆变器接通三相交流。
图2-22所示为对称调制模式的实时计算系统,图2-22a为矢量图,图中α轴及6个基本电压矢量是固定不动的,M及输出电流矢量i、输出电压矢量uref(即上面所述的uout)是以ω1的转速在同步旋转。设此时旋转到大于120°的区域时的扇区Ⅲ,图2-22b是运算框图,把位置检测器测得的角度θ*,除以60°得到的商加1为扇区号K,再用框内公式计算θ,uref和θ经矢量分解,得出组成的两个电压矢量urefx、urefy(即等同于前文所述的ux、uy)再按式(2-9)和式(2-11)算出各矢量的时间tx、ty,t0(M=2/3,当矢量线速度恒定,取ux=uy=Ud),加上区域号K,查出输出的开关函数,最后按顺序把各开关函数定时依次输出。
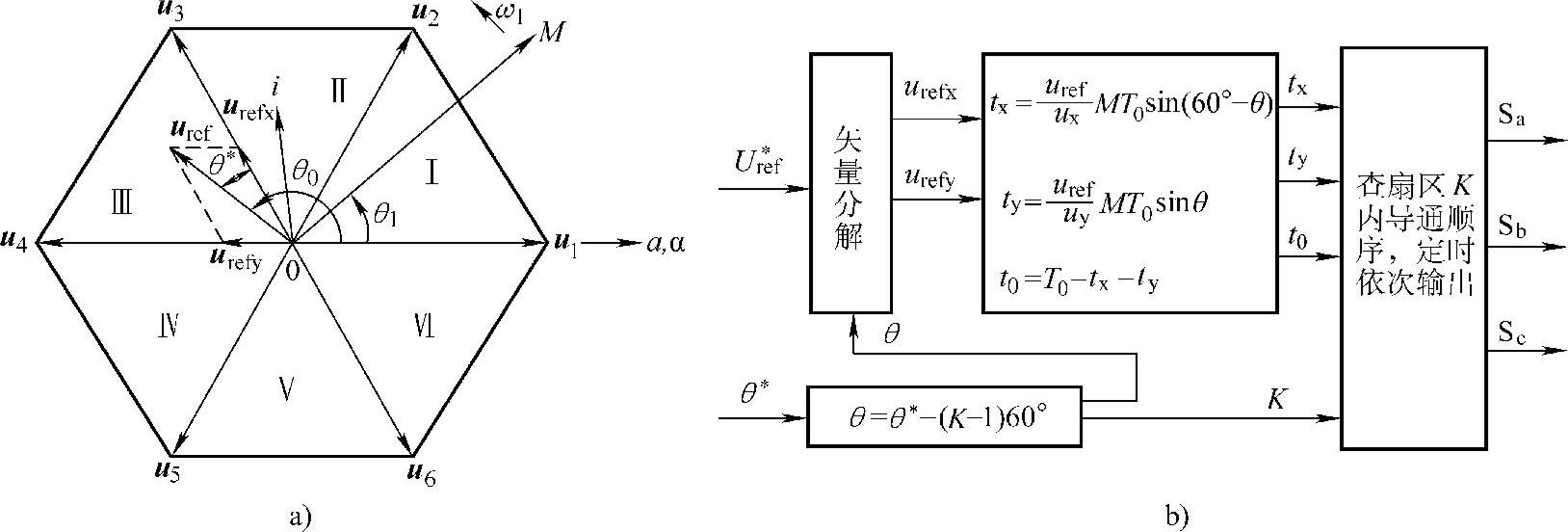
图2-22 对称调制模式的实时计算系统
若采用先进的DSP(Digital Signal Processor,数字信号处理器)芯片于此种模式,其算法信号流程如图2-23a所示。采样获得同步转速旋转dq坐标系上的电压矢量分量ud*和uq*,经坐标系变换(坐标变换见下章),得到u*(即uref)和相位角θ*,θ*与θe′(θe′为d轴与α轴的夹角,为对ω*积分获得,处于不断增加中)相加,得到了θe角(见图2-23b)。如果瞬时相电压作为给定值直接给出,u*和θe就可以直接得到。有了uref就可以计算调制系数M,有了θe就可以按图2-22判断扇区(即用θe除以60°取整加1),并计算出θ,从而可以得到相邻两个基本矢量ux和uy,进而计算tx、ty、t0,而后送到定时器定时输出。
用于SVPWM技术的DSP芯片有ADMC331、TMS320F240等,SVPWM的输出利用软件来构造。例如DSP采用TMS320F240芯片,在TMS320F240中,有3个全比较单元,利用它可生成6路PWM波形。它包括1个计数寄存器和3个比较寄存器,3个比较寄存器分别为CMPR1、CMPR2和CMPR3。这里采用计数器连续递增递减方式,当计数器在0到计数周期这段增计数周期内,计数器的值与比较寄存器的值相等时,输出电平发生一次跳变;在计数器达到计数周期时,计数器将开始减计数,当计数器再次与比较寄存器相等时,输出电平将再次跳变,这样通过改变比较寄存器的值,就可以得到不同占空比的PWM信号。
当编写程序时,将三相开关时间分别写入比较寄存器,设高电平有效,将1写入CMPR1,将(t0+t1)写入CMPR2,将(t2+t7/2)写入CMPR3,即可输出相应的波形。根据图2-23,图2-24所示为供参考的中断子程序流程图,采用该芯片每周期只发生一次定时器中断,实时性好,大大简化了程序编写过程。
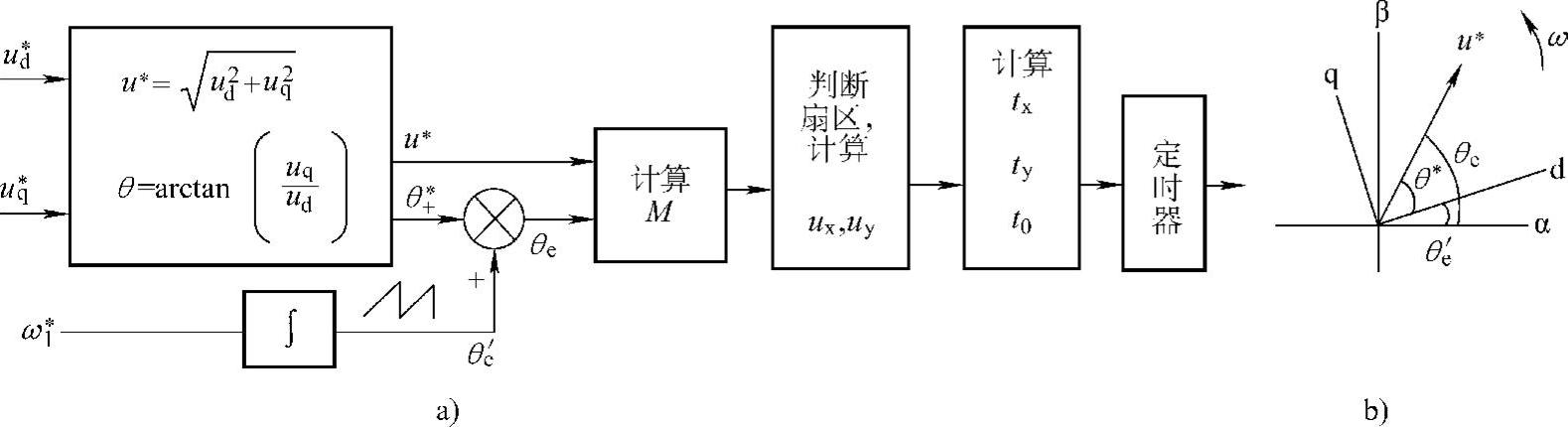
图2-23 用DSP实施SVPWM算法信号流程
上述过程要经过仿真检验结果。关于仿真,一般采用MATLAB芯片,使用此芯片解决具体问题建立数学模型快速方便,其语言语法规律简单,将命令、翻译、工程计算等功能集为一体,最适于仿真工作。
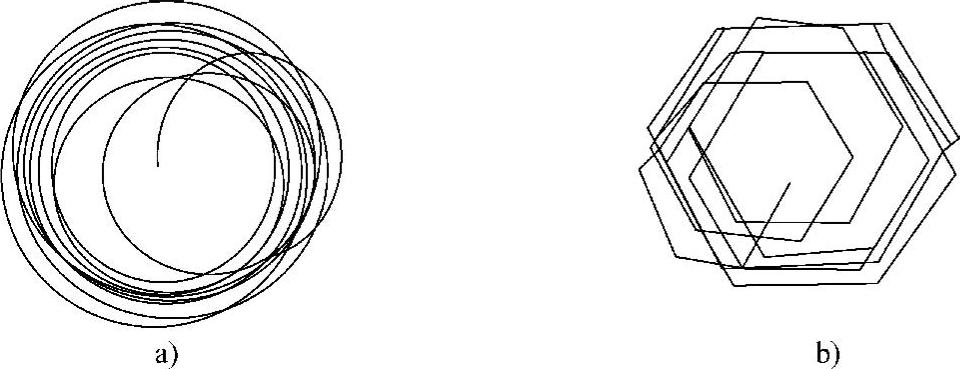
上述算法的实施,经过仿真,其结果是磁链轨迹近于圆形,如图2-25a所示,图2-25b则为一般两电平逆变器输出的磁链轨迹图形,可见是一六边形。
关于在哪一个扇区的判定,根据不同给定条件来决定。若直接给定了u*和相角θ,就可按图2-22找到扇区。若给定为ud*和uq*,则如图2-23所示算法求得扇区。若只给定uref,可以按图2-26所示的方法分解为uα和uβ,然后按下述步骤计算找到扇区:
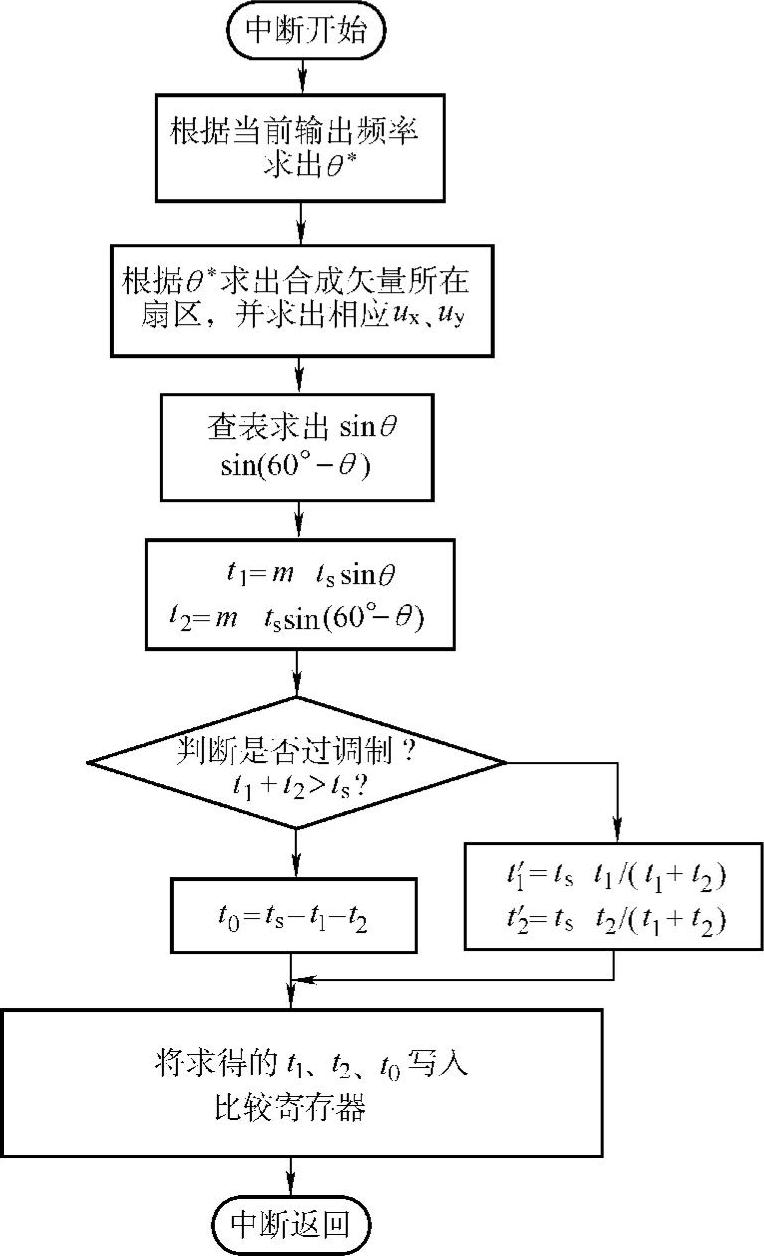
图2-24 中断子程序流程图(ts即T0)
 (https://www.xing528.com)
(https://www.xing528.com)
图2-25 仿真结果
1)计算参考值uref1uref2uref3:

2)计算N:
N=sign(uref1)+2sign(uref2)+4sign(uref3) (2-15)
式中 sign(x)——符号函数,
3)根据N的数值可从表2-4中查到uref所在扇区。
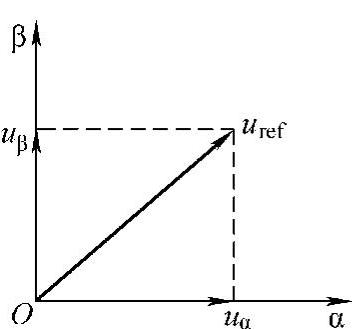
图2-26 uref分解为uα、uβ
表2-4 所在扇区

免责声明:以上内容源自网络,版权归原作者所有,如有侵犯您的原创版权请告知,我们将尽快删除相关内容。